
Prime Plaza O verdadeiro triple AAA de Santos. Prime Plaza O verdadeiro triple AAA de Santos.

1
1Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto
Capítulo 1
Definição de Sinais e Sistemas
1.1 Introdução
1.2 Representação dos sinais como funções
1.3 Representação dos sistemas como funções
1.4 Definições básicas de funções
1.5 Definição de sinal
1.6 Definição de sistema
2Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto
Capítulo 1
Definição de Sinais e Sistemas
1.1 Introdução
1.2 Representação dos sinais como funções
1.3 Representação dos sistemas como funções
1.4 Definições básicas de funções
1.5 Definição de sinal
1.6 Definição de sistema
2
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 3
1.1 Introdução (1/2)
• Sinais contêm / transportam informação– Som, imagem, música, sequência de comandos, lista de nomes, ...
• Sistemas armazenam, transformam e transmitem sinais– Relação entre os sinais de entrada e de saída (descrição declarativa do
sistema)
– Procedimento para converter o sinal de entrada no de saída (descrição imperativa do sistema)
– Gravador de vídeo, sistema de reconhecimento de fala, sistema de síntese de texto para fala, sistema operativo, sistema que interpreta uma sequência de comandos de um músico e produz um som, ...
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 4
1.1 Introdução (2/2)
• Vamos desenvolver modelos matemáticos de forma a formalizar estes conceitos.
• Vamos modelar tanto os sinais como os sistemas como funções.– Sinal é uma função que mapeia o domínio no contra-domínio
• Domínio: Tempo, espaço, ...
• Contra-domínio: Pressão do ar, intensidade luminosa, ...
– Sistema é uma função que mapeia sinais do domínio em sinais do contra-domínio
• Domínio e contra-domínio são conjuntos de sinais (espaço de sinais)
• Sistema é uma função que opera em funções
3
5Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto
Capítulo 1
Definição de Sinais e Sistemas
1.1 Introdução
1.2 Representação dos sinais como funções
1.3 Representação dos sistemas como funções
1.4 Definições básicas de funções
1.5 Definição de sinal
1.6 Definição de sistema
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 6
1.2 Representação dos sinais como funções
• Sinais são funções que transportam informação na forma de padrões temporais e espaciais– Rádio e TV são ondas electromagnéticas
– Imagens são padrões espaciais de intensidades luminosas de diferentes cores
– Sensores (velocidade, temperatura ou pressão) convertem essas quantidades em tensão eléctrica, que são convertidas em digital para processamento através do computador
– Vamos também estudar sinais usados para representar sequências de comandos ou sequência de eventos
4
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 7
1.2 Representação dos sinais como funções
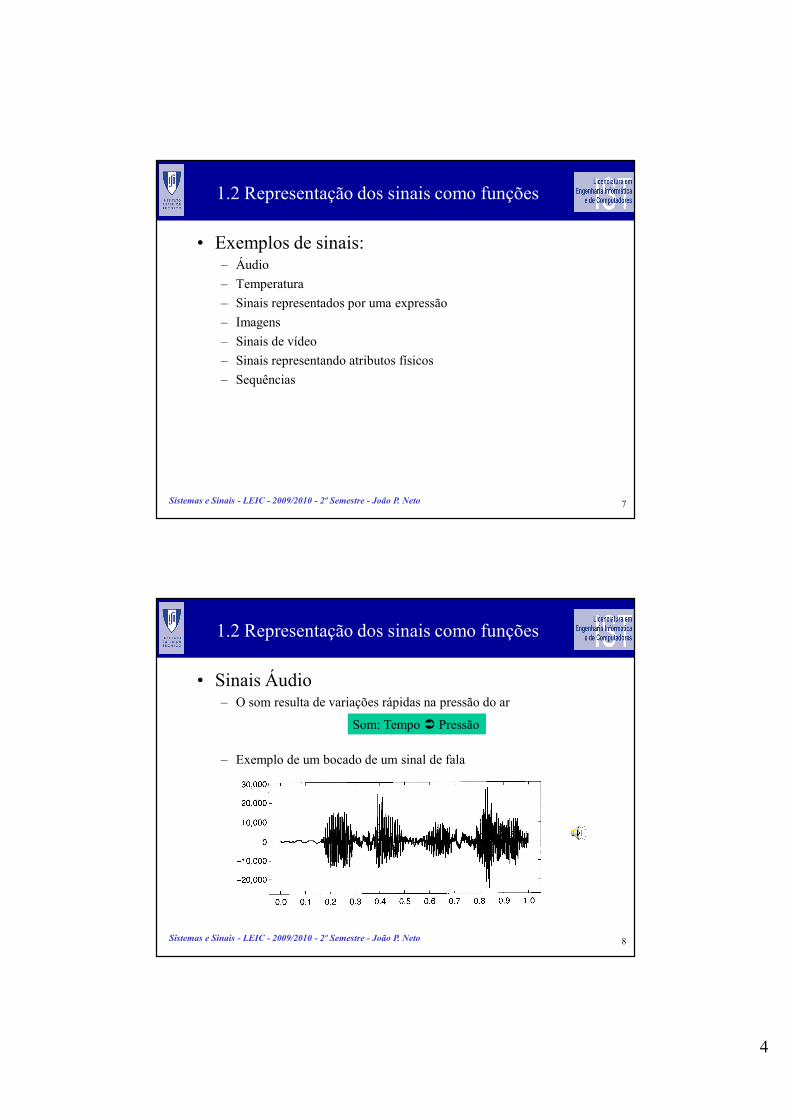
• Exemplos de sinais:– Áudio
– Temperatura
– Sinais representados por uma expressão
– Imagens
– Sinais de vídeo
– Sinais representando atributos físicos
– Sequências
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 8
1.2 Representação dos sinais como funções
• Sinais Áudio– O som resulta de variações rápidas na pressão do ar
Som: Tempo � Pressão
– Exemplo de um bocado de um sinal de fala
Som: Tempo � Pressão

5
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 9
1.2 Representação dos sinais como funções
– Sinais contínuos são funções definidas num intervalo contínuo de tempo (conjunto dos Reais)
– Sinais discretos são definidos apenas em pontos discretos no tempo
– Exemplo de um fragmento de um sinal de fala discreto
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 10
1.2 Representação dos sinais como funções
• Temperatura– Evolução da temperatura de uma forma contínua
– Representação da temperatura de uma forma discreta
0 12 24
0 12 24
6
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 11
1.2 Representação dos sinais como funções
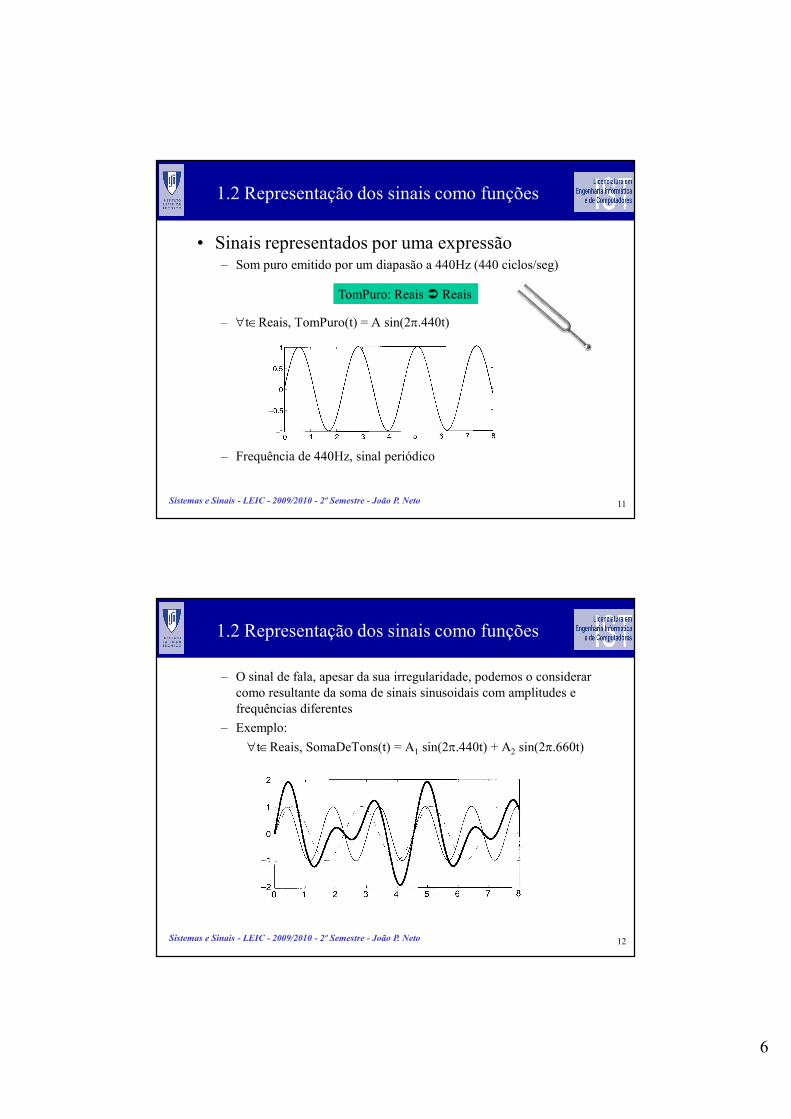
• Sinais representados por uma expressão– Som puro emitido por um diapasão a 440Hz (440 ciclos/seg)
– ∀t∈Reais, TomPuro(t) = A sin(2π.440t)
– Frequência de 440Hz, sinal periódico
TomPuro: Reais � Reais
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 12
1.2 Representação dos sinais como funções
– O sinal de fala, apesar da sua irregularidade, podemos o considerar como resultante da soma de sinais sinusoidais com amplitudes e frequências diferentes
– Exemplo:
∀t∈Reais, SomaDeTons(t) = A1 sin(2π.440t) + A2 sin(2π.660t)

7
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 13
1.2 Representação dos sinais como funções
• Imagens
– ImagemPB: [0,11]x[0,15] � [0,Bmax]
– Os valores de RGB em cada ponto (x,y) do domínio é o triple (r,g,b)∈Intensidade3
(r,g,b) = ImagemCor(x,y)
ImagemPB: EspaçoVertical x EspaçoHorizontal � Intensidade
ImagemCor: EspaçoVertical x EspaçoHorizontal � Intensidade3
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 14
1.2 Representação dos sinais como funções
– Uma imagem digital é discreta tanto no domínio como no contra-domínio
• Imagem de 300x200 pixels
• EspaçoVertical={1,2,..., 300}
• EspaçoHorizontal={1,2,..., 200}
• Inteiros8={0,1,...,255}
ImagemDigital: EspaçoVertical x EspaçoHorizontal � Inteiros83

8
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 15
1.2 Representação dos sinais como funções
• Sinal de vídeo– Um vídeo é uma sequência de imagens mostradas a uma determinada
frequência / ritmo (NTSC 30 imagens/seg)
Vídeo: TempoTrama � ImagemDigital
ImagemDigital: EspaçoVertical x EspaçoHorizontal � Intensidade3
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 16
1.2 Representação dos sinais como funções
• Sinais representando atributos físicos
– A posição de um avião pode ser expressa como
onde ∀t∈Tempo, Posição(t) =( x(t), y(t), z(t) )
– A posição e velocidade do avião é a função
onde ∀t∈Tempo, s(t) =( x(t), y(t), z(t), Vx(t), Vy(t), Vz(t) )
Posição: Tempo � Reais3
Posição: Tempo � Reais6

9
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 17
1.2 Representação dos sinais como funções
• Sequências– Sequências ocorrem como representação de dados ou como
representação de um fluxo de eventos
– Exemplos:• Um ficheiro guardado num disco é uma sequência de bits
• Uma pauta de música é uma sequência de notas
– Sequências de dados são funções da forma
• Neste caso os Índices deixam de representar instantes uniformemente espaçados no tempo mas os símbolos ocorrem em sequência
– Fluxo de eventos• LevantarAuscultador, OuvirSinalLigar, DigitarDígitos, OuvirSinalChamar, OuvirResposta, ...
Dados: Índices � Símbolos
18Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto
Capítulo 1
Definição de Sinais e Sistemas
1.1 Introdução
1.2 Representação dos sinais como funções
1.3 Representação dos sistemas como funções
1.4 Definições básicas de funções
1.5 Definição de sinal
1.6 Definição de sistema

10
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 19
1.3 Representação dos sistemas como funções
– Sistemas são funções que transformam sinais
– Exemplo: concerto ao vivo• O som produzido não é preservado para a posteridade
• Gravar o concerto– Armazenamento do sinal
• Melhorar a qualidade do som– Equalizador de áudio
– Redução de ruído
• Disponibilizar na Web– Codificação / descodificação do sinal
– Encriptação / decifração
– Sistemas para controlar processos físicos: aquecimento da sala• Sensores que geram sinais com informação
• Controlador para gerar os sinais que vão actuar
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 20
1.3 Representação dos sistemas como funções
• Sistemas como funções– Considere-se um sistema S que transforma o sinal de entrada x no
sinal de saída y
y=S(x)
– Suponha-se que x:D � R
– O domínio de S é o conjunto X
X = [D � R] = {x|x:D � R}
– O conjunto X é denominado o espaço do sinal ou o espaço da função
– O sistema S é uma função mapeando um espaço de sinal noutro espaço de sinal
S : [D � R] � [D’ � R’]

11
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 21
1.3 Representação dos sistemas como funções
• Sistema de telecomunicações global
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 22
1.3 Representação dos sistemas como funções
• Sistema DTMF

12
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 23
1.3 Representação dos sistemas como funções
• Modems
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 24
1.3 Representação dos sistemas como funções
• Sistema de controlo com retroacção (feedback)– Controlo de temperatura
– Escada rolante

13
25Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto
Capítulo 1
Definição de Sinais e Sistemas
1.1 Introdução
1.2 Representação dos sinais como funções
1.3 Representação dos sistemas como funções
1.4 Definições básicas de funções
1.5 Definição de sinal
1.6 Definição de sistema
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 26
1.4 Definições básicas de funções
• Atribuição declarativa– Defina-se f:X � Y
∀x∈X, f(x) =expressão em x
– A definição desta função é declarativa porque declara propriedades da função sem explicar como construir a função.
– Exemplos:•
•
•
>
=
<−
=∈∀
01
00
01
)(,Reais
xse
xse
xse
xSinalx
22)(,C yxzAbsolutoomplexosjyxz +=∈+=∀
2)(,Reais xxQuadradox =∈∀
14
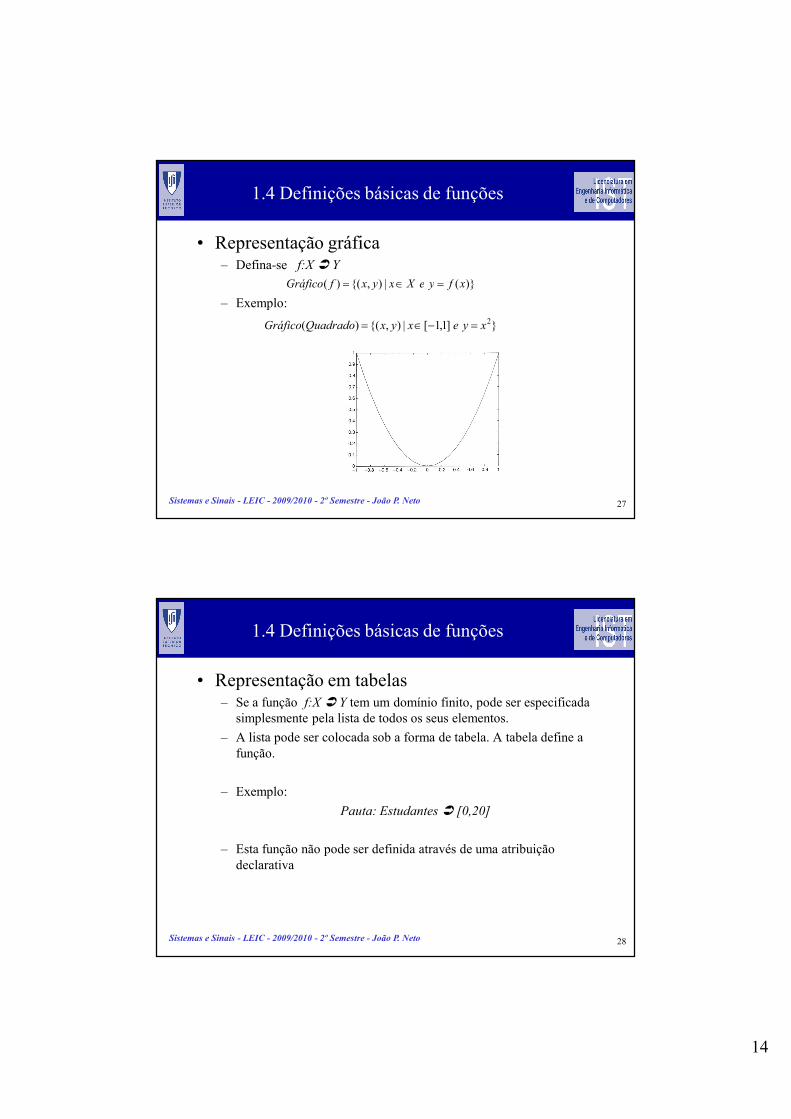
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 27
1.4 Definições básicas de funções
• Representação gráfica– Defina-se f:X � Y
– Exemplo:
)}(|),{()( xfyeXxyxfGráfico =∈=
}]1,1[|),{()( 2xyexyxQuadradoGráfico =−∈=
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 28
1.4 Definições básicas de funções
• Representação em tabelas– Se a função f:X � Y tem um domínio finito, pode ser especificada
simplesmente pela lista de todos os seus elementos.
– A lista pode ser colocada sob a forma de tabela. A tabela define a função.
– Exemplo:
Pauta: Estudantes � [0,20]
– Esta função não pode ser definida através de uma atribuição declarativa

15
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 29
1.4 Definições básicas de funções
• Procedimentos– Neste caso vamos ter um método construtivo para determinar um
elemento no contradomínio dado um elemento no domínio
– Exemplo: procedimento para calcular um factorial de um número
Factorial: {1,...,10} � Naturais
Factorial(1)=1;
for n=2:10
Factorial(n)=n*Factorial(n-1);
End
– Denomina-se atribuição imperativa
– Exemplo:
x
xy
)sin(= xxMathy /)sin(.=
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 30
1.4 Definições básicas de funções
• Composição de funções– Funções podem ser combinadas para definir novas funções
– Composição de funções
– O contradomínio de f1 tem que estar contido no domínio de f2.
– Exemplo: sistema de transmissão de dados
bits � modem � sinal de fala � rede telefónica
– Notação:
))(())(( 1212 xffxff =o
':)(''':: 312321 YXfondefffentãoXYSeYXfeYXf →=⊂→→ o
))(()(, 123 xffxfXx =∈∀
16
31Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto
Capítulo 1
Definição de Sinais e Sistemas
1.1 Introdução
1.2 Representação dos sinais como funções
1.3 Representação dos sistemas como funções
1.4 Definições básicas de funções
1.5 Definição de sinal
1.6 Definição de sistema
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 32
1.5 Definição de sinal
• Os sinais são funções– Definição através da atribuição declarativa e imperativa ou através de
um modelo físico que produza esse sinal.
– Exemplo: sinal de áudio que é um tom puro a 440Hz
• Definição declarativa
• Definição imperativa
double s(double t) { return(Math.cos(440*2*Math.Pi*t)); }
)2*440cos()(,Tempo ttSt π=∈∀
17
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 33
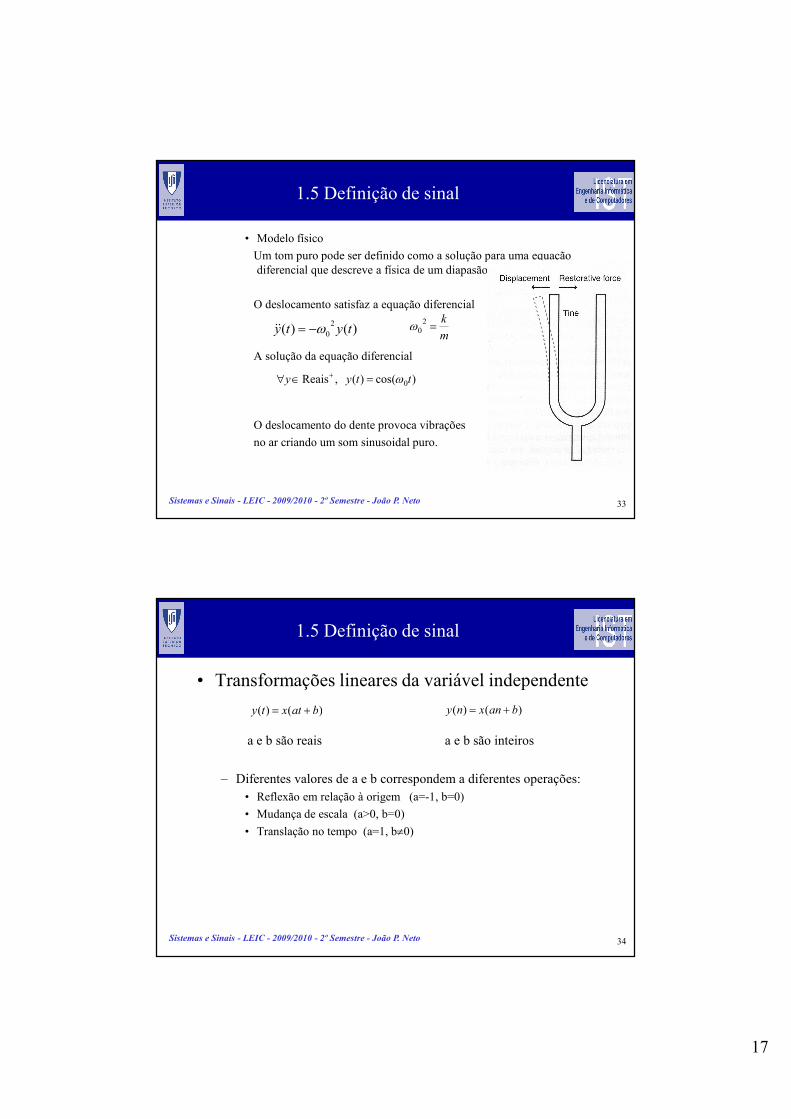
1.5 Definição de sinal
• Modelo físico
Um tom puro pode ser definido como a solução para uma equação diferencial que descreve a física de um diapasão
O deslocamento satisfaz a equação diferencial
A solução da equação diferencial
O deslocamento do dente provoca vibrações
no ar criando um som sinusoidal puro.
)()( 20 tyty ω−=&&
)cos()(,Reais 0ttyy ω=∈∀ +
m
k=2
0ω
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 34
1.5 Definição de sinal
• Transformações lineares da variável independente
a e b são reais a e b são inteiros
– Diferentes valores de a e b correspondem a diferentes operações:• Reflexão em relação à origem (a=-1, b=0)
• Mudança de escala (a>0, b=0)
• Translação no tempo (a=1, b≠0)
)()( batxty += )()( banxny +=
18
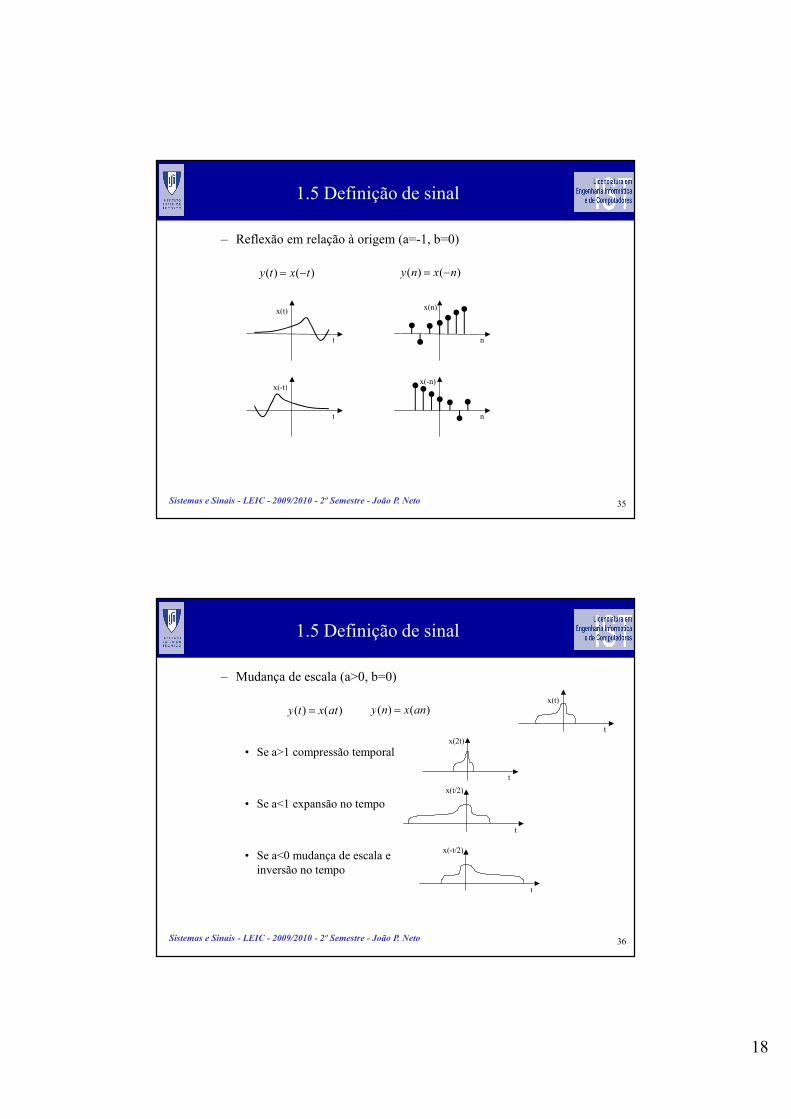
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 35
1.5 Definição de sinal
– Reflexão em relação à origem (a=-1, b=0)
)()( txty −= )()( nxny −=
t
x(t)
t
x(-t)
n
x(n)
n
x(-n)
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 36
1.5 Definição de sinal
– Mudança de escala (a>0, b=0)
• Se a>1 compressão temporal
• Se a<1 expansão no tempo
• Se a<0 mudança de escala e inversão no tempo
)()( atxty = )()( anxny =
t
x(t)
t
x(2t)
t
x(t/2)
t
x(-t/2)
19
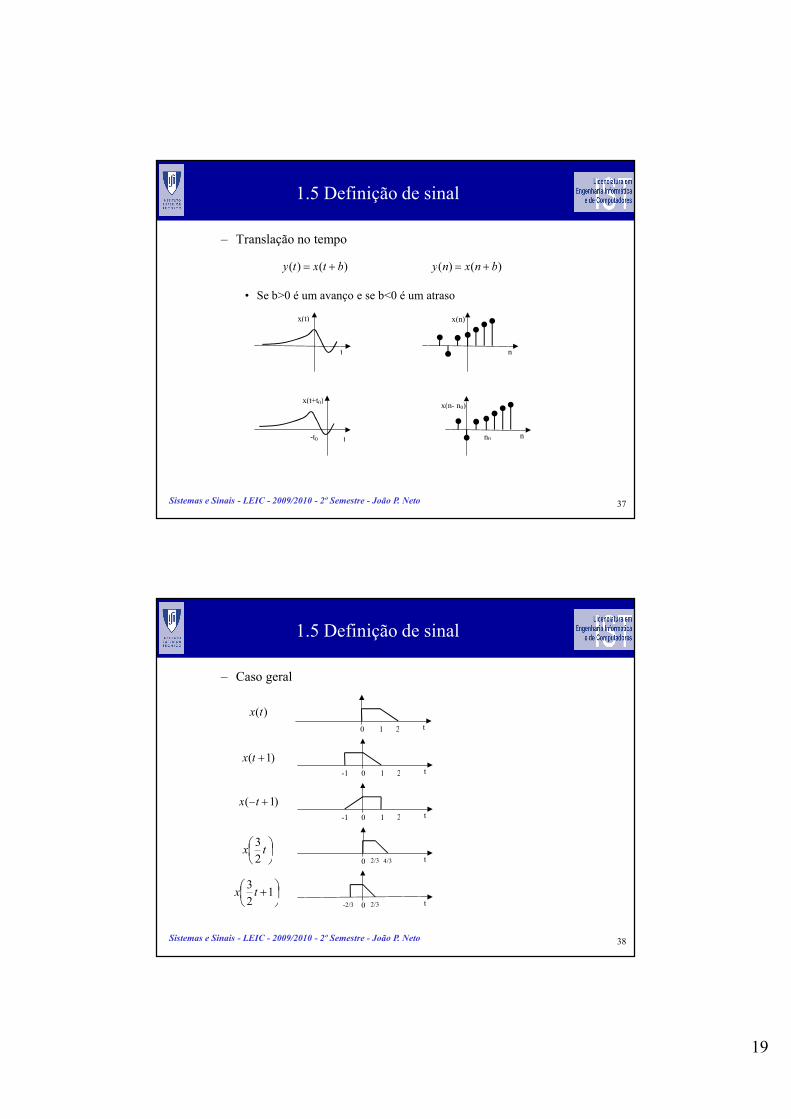
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 37
1.5 Definição de sinal
– Translação no tempo
• Se b>0 é um avanço e se b<0 é um atraso
)()( btxty += )()( bnxny +=
t
x(t)
t
x(t+t0)
-t0
n
x(n)
n
x(n- n0)
n0
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 38
1.5 Definição de sinal
– Caso geral
t 0 1 2
t 0 1 2-1
t 0 1 2-1
t 0 2/3 4/3
t 0 2/3 -2/3
)(tx
)1( +tx
)1( +−tx
tx2
3
+12
3tx
20
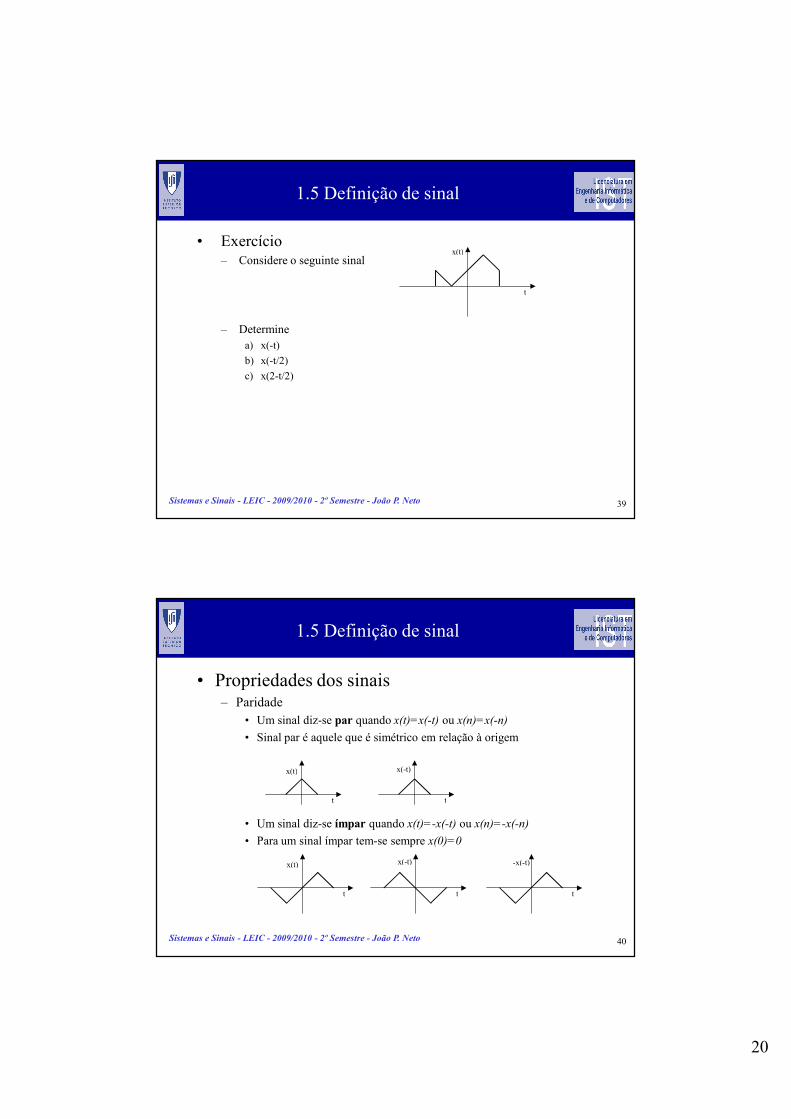
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 39
1.5 Definição de sinal
• Exercício– Considere o seguinte sinal
– Determine a) x(-t)
b) x(-t/2)
c) x(2-t/2)
t
x(t)
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 40
1.5 Definição de sinal
• Propriedades dos sinais– Paridade
• Um sinal diz-se par quando x(t)=x(-t) ou x(n)=x(-n)
• Sinal par é aquele que é simétrico em relação à origem
• Um sinal diz-se ímpar quando x(t)=-x(-t) ou x(n)=-x(-n)
• Para um sinal ímpar tem-se sempre x(0)=0
t
x(t)
t
x(-t)
t
-x(-t)
t
x(t)
t
x(-t)

21
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 41
1.5 Definição de sinal
• Qualquer sinal pode ser decomposto na soma de um sinal par com um sinal ímpar
• Decompor o seguinte sinal:
)()()( txtxtx ip += )()()( nxnxnx ip +=
[ ])()(2
1)( txtxtxp −+=
[ ])()(2
1)( txtxtxi −−=
t
x(t)
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 42
1.5 Definição de sinal
– Periodicidade• Um sinal diz-se periódico quando existe T>0 (ou N>0) tal que
• O parâmetro T (ou N) designa-se por período do sinal
• Se x(t) é periódico com período T então ∀t x(t)=x(t+mT) com m=1,2,3,...
ou seja x(t) é periódico com período T,2T,3T,...
• Define-se como período fundamental T0 o menor valor positivo T0 para o qual ∀t x(t)=x(t+T0)
• O sinal x(t)=cte. é periódico, não se definindo o período fundamental
• O valor de N terá de ser um valor inteiro
)()( Ttxtxt +=∀ )()( Nnxnxn +=∀
t
... ...
0 T 2T -2T -T
22
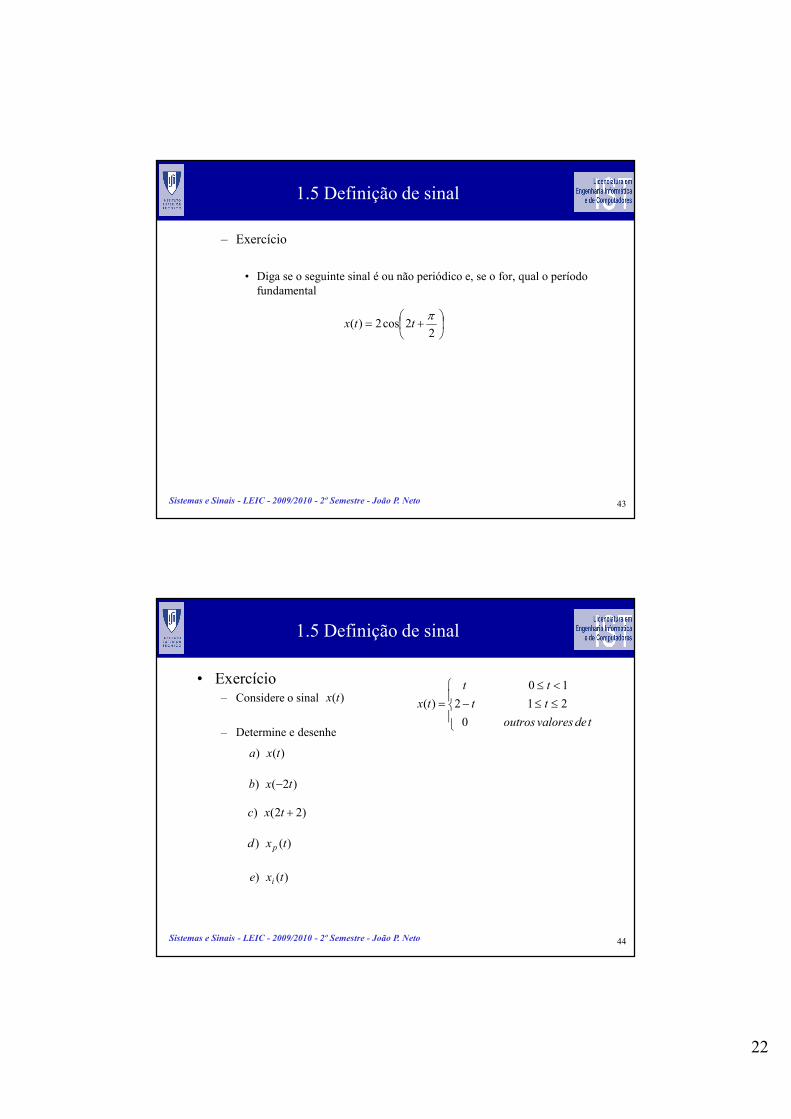
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 43
1.5 Definição de sinal
– Exercício
• Diga se o seguinte sinal é ou não periódico e, se o for, qual o período fundamental
+=
22cos2)(
πttx
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 44
1.5 Definição de sinal
• Exercício– Considere o sinal
– Determine e desenhe
≤≤−
<≤
=
tdevaloresoutros
tt
tt
tx
0
212
10
)()(tx
)() txa
)2() txb −
)22() +txc
)() txd p
)() txe i
23
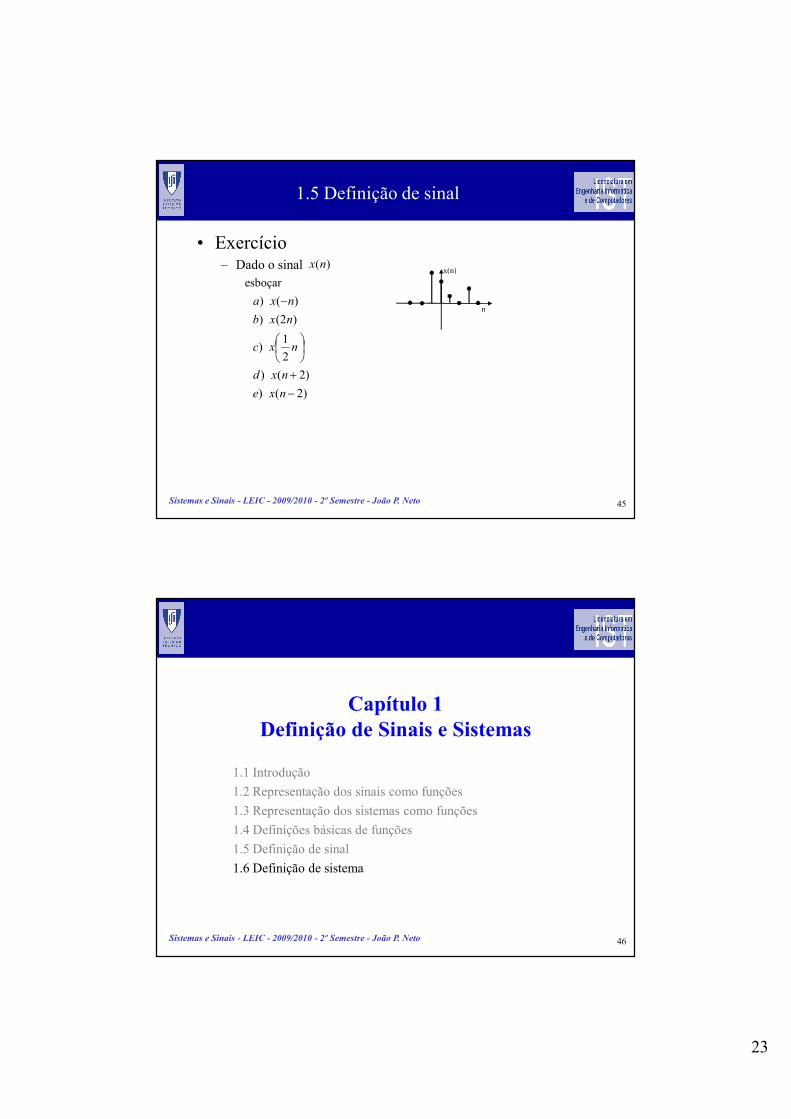
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 45
1.5 Definição de sinal
• Exercício– Dado o sinal
esboçar
)(nx
)2()
)2()
2
1)
)2()
)()
−
+
−
nxe
nxd
nxc
nxb
nxa
n
x(n)
46Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto
Capítulo 1
Definição de Sinais e Sistemas
1.1 Introdução
1.2 Representação dos sinais como funções
1.3 Representação dos sistemas como funções
1.4 Definições básicas de funções
1.5 Definição de sinal
1.6 Definição de sistema
24
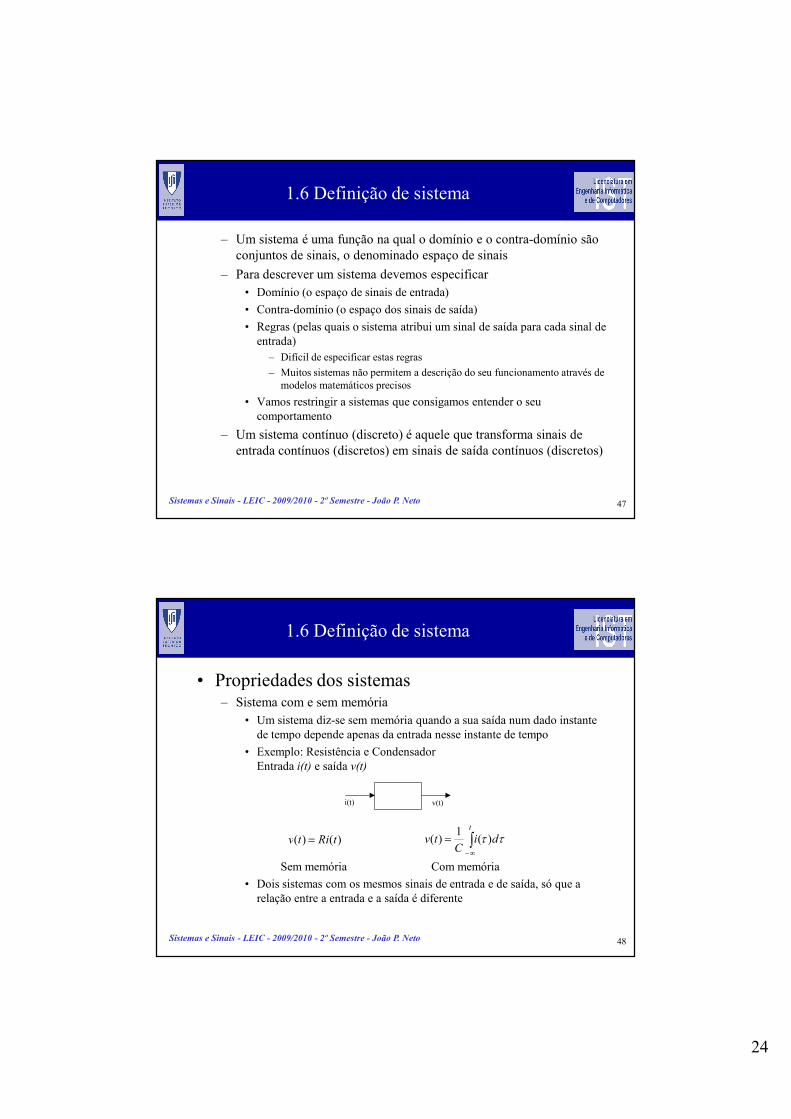
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 47
1.6 Definição de sistema
– Um sistema é uma função na qual o domínio e o contra-domínio são conjuntos de sinais, o denominado espaço de sinais
– Para descrever um sistema devemos especificar• Domínio (o espaço de sinais de entrada)
• Contra-domínio (o espaço dos sinais de saída)
• Regras (pelas quais o sistema atribui um sinal de saída para cada sinal de entrada)
– Difícil de especificar estas regras
– Muitos sistemas não permitem a descrição do seu funcionamento através de modelos matemáticos precisos
• Vamos restringir a sistemas que consigamos entender o seu comportamento
– Um sistema contínuo (discreto) é aquele que transforma sinais de entrada contínuos (discretos) em sinais de saída contínuos (discretos)
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 48
1.6 Definição de sistema
• Propriedades dos sistemas– Sistema com e sem memória
• Um sistema diz-se sem memória quando a sua saída num dado instante de tempo depende apenas da entrada nesse instante de tempo
• Exemplo: Resistência e CondensadorEntrada i(t) e saída v(t)
Sem memória Com memória
• Dois sistemas com os mesmos sinais de entrada e de saída, só que a relação entre a entrada e a saída é diferente
)()( tRitv = ∫∞−
=t
diC
tv ττ )(1
)(
i(t) v(t)

25
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 49
1.6 Definição de sistema
– Causalidade• Um sistema causal (não-antecipativo) é aquele para o qual o sinal de
saída depende apenas do presente e/ou do passado do sinal de entrada
• Exemplo: Automóvel é um sistema causal– Só depois de carregar no acelerador é que ele se move
• Exemplo: Condensador é um sistema causal– A tensão de saída depende da corrente até ao instante t
• Os sistemas sem memória são sempre causaisy(n)=x(n)-x(n+1)
• Embora os sistemas causais sejam de grande importância não são os únicos
– Tratamento de imagens, tratamento de dados previamente gravados
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 50
1.6 Definição de sistema
– Estabilidade• Um sistema diz-se estável de entrada limitada / saída limitada quando
qualquer entrada limitada dá origem a uma saída limitada
• Existem vários conceitos de estabilidade / instabilidade
• Exemplos:
y(n) = x(n)
y(n) = 2 x(n)
y(n) = n x(n)
26
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 51
1.6 Definição de sistema
– Invariância temporal• Um sistema diz-se invariante no tempo quando uma translação no tempo
do sinal de entrada conduz à mesma translação no tempo do sinal de saída, i.e.,
• Exemplo: Condensador - sistema invariante no tempo
• Exemplo: sistema variante no tempo
)()()()( 00 ttyttxtytx −→−⇒→
∫∞−
=t
diC
tv ττ )(1
)( 11
)(2
1)( 11 nxny
n
=
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 52
1.6 Definição de sistema
– Linearidade• Um sistema linear é aquele que possui a propriedade da sobreposição: se
o sinal de entrada é uma combinação linear de vários sinais, então a saída do sistema é a mesma combinação linear (sobreposição) das saídas correspondentes a cada uma das entradas individuais.
• Um sistema linear goza das seguintes propriedades:– Aditividade:
– Homogeneidade:
– Sobreposição:
• Exemplos:
)()()()( 2121 tytytxtx +→+
)()( 11 taytax →
)()(11
tyatxa k
K
kkk
K
kk ∑∑
==
→
)()( nnxny =
))(sin()( txty =
27
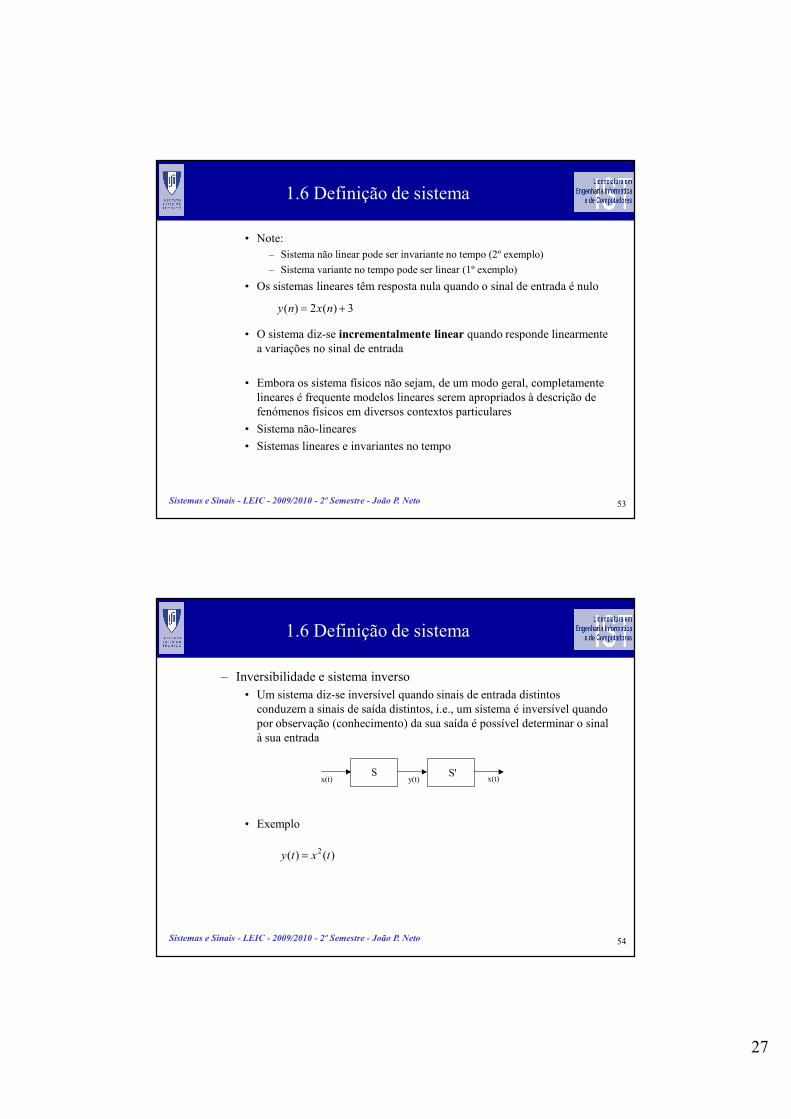
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 53
1.6 Definição de sistema
• Note:– Sistema não linear pode ser invariante no tempo (2º exemplo)
– Sistema variante no tempo pode ser linear (1º exemplo)
• Os sistemas lineares têm resposta nula quando o sinal de entrada é nulo
• O sistema diz-se incrementalmente linear quando responde linearmente a variações no sinal de entrada
• Embora os sistema físicos não sejam, de um modo geral, completamente lineares é frequente modelos lineares serem apropriados à descrição de fenómenos físicos em diversos contextos particulares
• Sistema não-lineares
• Sistemas lineares e invariantes no tempo
3)(2)( += nxny
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 54
1.6 Definição de sistema
– Inversibilidade e sistema inverso• Um sistema diz-se inversível quando sinais de entrada distintos
conduzem a sinais de saída distintos, i.e., um sistema é inversível quando por observação (conhecimento) da sua saída é possível determinar o sinal à sua entrada
• Exemplo
x(t) y(t) x(t) S S'
)()( 2txty =
28
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 55
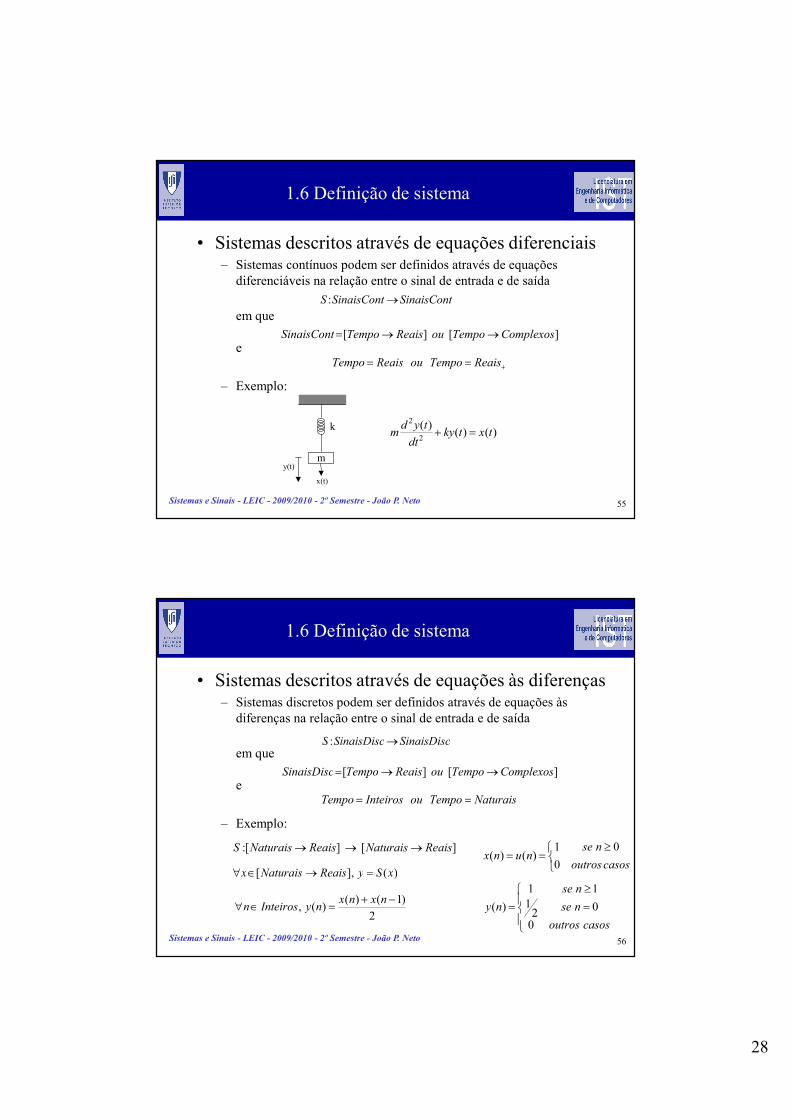
1.6 Definição de sistema
• Sistemas descritos através de equações diferenciais– Sistemas contínuos podem ser definidos através de equações
diferenciáveis na relação entre o sinal de entrada e de saída
em que
e
– Exemplo:
SinaisContSinaisContS →:
+== ReaisTempoouReaisTempo
][][ ComplexosTempoouReaisTempoSinaisCont →→=
m
x(t)
k
y(t)
)()()(
2
2
txtkydt
tydm =+
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 56
1.6 Definição de sistema
• Sistemas descritos através de equações às diferenças– Sistemas discretos podem ser definidos através de equações às
diferenças na relação entre o sinal de entrada e de saída
em que
e
– Exemplo:
SinaisDiscSinaisDiscS →:
NaturaisTempoouInteirosTempo ==
][][ ComplexosTempoouReaisTempoSinaisDisc →→=
][][: ReaisNaturaisReaisNaturaisS →→→
)(],[ xSyReaisNaturaisx =→∈∀
2
)1()()(,
−+=∈∀
nxnxnyInteirosn
≥
==casosoutros
nsenunx
0
01)()(
=
≥
=
casosoutros
nse
nse
ny
0
021
11
)(

29
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 57
1.6 Definição de sistema
• Diagrama de blocos– Diagrama de blocos é uma sintaxe visual para descrever um sistema
como uma interligação de outros sistemas, cada um deles com uma relação particular de entrada/saída
– Cada bloco representa um sistema individual que transforma um sinal de entrada num sinal de saída
– Um bloco representa uma função, e a ligação da saída de um bloco na entrada de outro bloco representa a composição das duas funções (a saída de um bloco deve ser do mesmo tipo da entrada do outro bloco)
– Os diagramas de blocos permitem uma combinação hierárquica de blocos permitindo esconder determinados passos e realçar outros
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 58
1.6 Definição de sistema
S1:X→→→→Y
S2:Y→→→→Z
S:X→→→→Z
x∈∈∈∈X y∈∈∈∈Y z∈∈∈∈Z
X=[D→→→→R] Y=[D'→→→→R'
]
Z=[D''→→→→R'']
∀∀∀∀x∈∈∈∈X, S(x)=S2(S1(x))
30
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 59
1.6 Definição de sistema
S1:X→→→→Y
S2: WxY→→→→Z
S:WxX→→→→Z
x∈∈∈∈X y∈∈∈∈Y
z∈∈∈∈Z
X=[Dx→→→→Rx] Y=[Dy→→→→Ry]
Z=[Dz→→→→Rz]
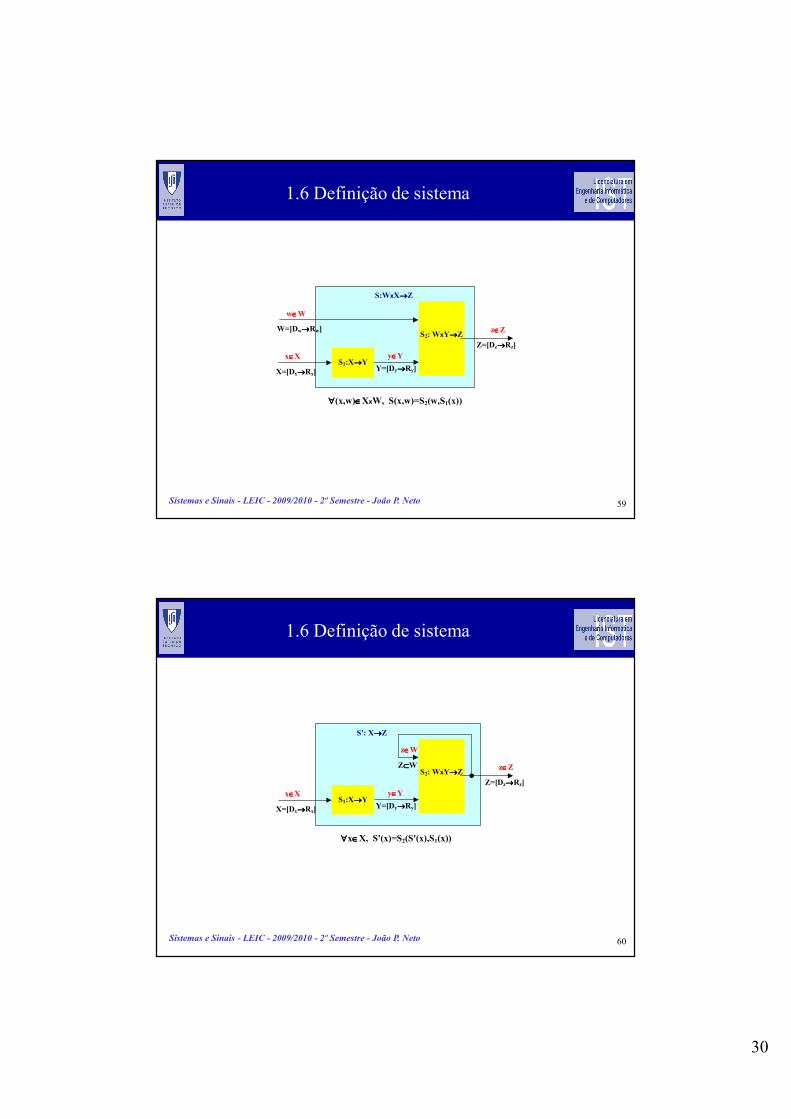
∀∀∀∀(x,w)∈∈∈∈XxW, S(x,w)=S2(w,S1(x))
w∈∈∈∈W
W=[Dw→→→→Rw]
Sistemas e Sinais - LEIC - 2009/2010 - 2º Semestre - João P. Neto 60
1.6 Definição de sistema
S1:X→→→→Y
S2: WxY→→→→Z
S': X→→→→Z
x∈∈∈∈X y∈∈∈∈Y
z∈∈∈∈Z
X=[Dx→→→→Rx] Y=[Dy→→→→Ry]
Z=[Dz→→→→Rz]
∀∀∀∀x∈∈∈∈X, S'(x)=S2(S'(x),S1(x))
z∈∈∈∈W
Z⊂⊂⊂⊂W













![Concurso 17 18 EDITAL COMPLETO2[1] · , a + * s i x i k s p b a b o d c j b " $ 1 " > $ # $ : b g i b a f x l x k x y g i b a h g f e k c b a b u h g e g p g h b a l 2 k j > i $ $](https://static.fdocumentos.tips/doc/165x107/5e3c521992f290383e2a93e6/concurso-17-18-edital-completo21-a-s-i-x-i-k-s-p-b-a-b-o-d-c-j-b-.jpg)




