Braço mecânico controlado pela diferença de potencial ocular
98
PONTIFÍCIA UNIVERSIDADE CATÓLICA DE MINAS GERAIS Programa de Graduação em Engenharia Mecânica Ênfase em Mecatrônica Jackson Junio Pereira Tironi Rafael de Almeida Lial Saulo Vieira Fidelis e Moura BRAÇO MECÂNICO CONTROLADO PELA DIFERENÇA DE POTENCIAL OCULAR Belo Horizonte 2012
-
Upload
rafael-lial -
Category
Technology
-
view
2.266 -
download
7
description
Este trabalho concentra-se no estudo de disciplinas como ciência dos materiais, resistência dos materiais, robótica, automação, computação, circuitos elétricos, dispositivos eletrônicos, eletrônica de potência e sistema digitais, que integralmente irá ter base para criação de um circuito eletrônico capaz de captar sinais bioelétricos do movimento dos olhos, onde esses sinais serão amplificados e tratados, para que um microcontrolador controle e comande dois servomotores para mover um braço mecânico. Assim temos como grande objetivo proporcionar um maior conhecimento prático e teórico, no qual poderemos aplicar os estudos já adquiridos ao longo do curso e adquirir maiores conhecimentos com pesquisas que serão realizadas ao longo do desenvolvimento desse projeto.
Transcript of Braço mecânico controlado pela diferença de potencial ocular

PONTIFÍCIA UNIVERSIDADE CATÓLICA DE MINAS GERAIS
Programa de Graduação em Engenharia Mecânica Ênfase em Mecatrônica
Jackson Junio Pereira Tironi
Rafael de Almeida Lial
Saulo Vieira Fidelis e Moura
BRAÇO MECÂNICO CONTROLADO PELA DIFERENÇA DE POTENCIAL OCULAR
Belo Horizonte
2012

Jackson Junio Pereira Tironi
Rafael de Almeida Lial
Saulo Vieira Fidelis e Moura
BRAÇO MECÂNICO CONTROLADO PELA DIFERENÇA DE POTENCIAL OCULAR
Trabalho apresentado à disciplina
Trabalho de Integração de Curso III do
programa de Graduação em Engenharia
Mecânica ênfase Mecatrônica da
Pontifícia Universidade Católica de Minas
Gerais, como requisito parcial de
obtenção do título de Bacharel em
Engenharia.
Orientador: Sady Antônio dos Santos Filho
Belo Horizonte
2012
Jackson Junio Pereira Tironi
Rafael de Almeida Lial
Saulo Vieira Fidelis e Moura
BRAÇO MECÂNICO CONTROLADO PELA DIFERENÇA DE POTENCIAL OCULAR
Trabalho apresentado ao Curso de
Engenharia Mecânica com Ênfase em
Mecatrônica da Pontifícia Universidade
Católica de Minas Gerais, como requisito
parcial de obtenção do título de Bacharel
em Engenharia.
________________________________________________
Prof. Sady Antônio dos Santos Filho – Orientador - PUC Minas
Belo Horizonte, 26 de Novembro de 2012

A Deus, meus familiares, amigos e
companheiros de classe que muito nos ajudaram na
realização deste projeto.
AGRADECIMENTOS
A todos que contribuíram para a realização deste trabalho, fica expressa
aqui a minha gratidão, especialmente:
A Pontifícia Universidade Católica de Minas Gerais, pela oportunidade
de cursar Engenharia Mecânica (ênfase em Mecatrônica).
Ao orientador Sady Antônio dos Santos Filho e ao professor Cláudio
Campos, pelo ensino e apoio em todos os momentos necessários nesta
caminhada.
Aos nossos amigos de classe, principalmente ao Kennedy Miranda, pela
rica troca de experiências, que nos ajudou bastante.
A todos que, de alguma forma, contribuíram para esta construção.

“Nenhum caminho é longo demais quando um amigo nos acompanha”. (Autor Desconhecido)

RESUMO
Este trabalho concentra-se no estudo de disciplinas como ciência dos
materiais, resistência dos materiais, robótica, automação, computação,
circuitos elétricos, dispositivos eletrônicos, eletrônica de potência e sistema
digitais, que integralmente irá ter base para criação de um circuito eletrônico
capaz de captar sinais bioelétricos do movimento dos olhos, onde esses sinais
serão amplificados e tratados, para que um microcontrolador controle e
comande dois servomotores para mover um braço mecânico.
Assim temos como grande objetivo proporcionar um maior conhecimento
prático e teórico, no qual poderemos aplicar os estudos já adquiridos ao longo
do curso e adquirir maiores conhecimentos com pesquisas que serão
realizadas ao longo do desenvolvimento desse projeto.
Palavras - Chave: Robótica, Braço Mecânico e Diferencia de Potencial Elétrico.

ABSTRACT
This work focuses on the study of subjects such as materials science,
strength of materials, robotics, automation, computer, electrical circuits,
electronic devices, power electronics and digital system, which will have full
basis for the creation of an electronic circuit capable of capture bioelectric
signals of eye movement, where these signals are amplified and treated for a
microcontroller control and command two servomotors to move a mechanical
arm.
Thus we have as main objective to provide further practical and
theoretical knowledge on which we can apply the studies already acquired
throughout the course and acquire more knowledge with research that will be
conducted throughout the development of this project.
Keywords: Robotics, Mechanical Arm and differentiates the electric potential.
LISTA DE FIGURAS
FIGURA 1 – A eletrooculargrafia (EOG) ....................................................... 18
FIGURA 2 – Partes do olho humano ............................................................. 18
FIGURA 3 – Modelo do dipolo elétrico para o olho ..................................... 19
FIGURA 4 – Eletrodo de captação de sinal biopotencial ............................ 19
FIGURA 5 – Colocação dos eletrodos para medição de sinais de EOG .... 20
FIGURA 6 –Resposta em frequencia de um bioamplificador ..................... 22
FIGURA 7 – Impedância de entrada e polarização do eletrodo .................. 23
FIGURA 8 – Circuito interno do Amplificador INA 114 ................................ 24
FIGURA 9 – Sistema computacional de um microcontrolador................... 25
FIGURA 10 – Servomotor .............................................................................. 28
FIGURA 11 – Análise de um servomotor ...................................................... 29
FIGURA 12 – Componentes de um servomotor ........................................... 29
FIGURA 13 –Fios de interface ....................................................................... 30
FIGURA 14 – Sinal PWM ................................................................................ 31
FIGURA 15 – Sinal de 1ms ............................................................................. 31
FIGURA 16 – Sinal de 1,5ms .......................................................................... 31
FIGURA 17 – Sinal de 2ms ............................................................................. 32
FIGURA 18 – Torque do eixo de saída de um servomotor ......................... 32
FIGURA 19 – Tipos de servomotores ........................................................... 33
FIGURA 20 – Preparação para colocação dos eletrodos ............................ 34
FIGURA 21 – Eletrodos para captação do sinal elétrico ............................. 35
FIGURA 22 – Locais de colocação dos eletrodos ....................................... 36
FIGURA 23 – Diagrama em blocos do bioamplificador ............................... 37
FIGURA 24 – Configuração do amplificador de instrumentação ............... 38
FIGURA 25 – Sinal de entrada do INA .......................................................... 39
FIGURA 26 – Sinal de saída do INA .............................................................. 39

FIGURA 27 – Circuito do filtro passa-alta .................................................... 41
FIGURA 28 – Sinal de entrada do filtro passa-alta ...................................... 41
FIGURA 29 – Sinal de saída do filtro passa-alta .......................................... 42
FIGURA 30 – Circuito de estágio de ganho ................................................. 43
FIGURA 31 – Circuito do filtro ativo passa baixa de 3ª ordem ................... 44
FIGURA 32 – Sinal de saída do filtro passa-baixa ....................................... 45
FIGURA 33 – Comparador com histerese......................................................46
FIGURA 34 – Sinal de saída do comparador com histerese ....................... 46
FIGURA 35 – Diagrama do circuito bioamplificador completo................... 47
FIGURA 36 – Placa do circuito bioamplificador desenvolvido .................. 47
FIGURA 37 – Configuração dos pinos do PIC 18F4550 .............................. 50
FIGURA 38 – Esquemmático do PIC 18F4550 .............................................. 50
FIGURA 39 – Circuito de regulagem do bioamplificador..............................51
FIGURA 40 – Esquema de ligação do clock externo de 20MHz ................. 52
FIGURA 41 – Implementação do PIC ............................................................ 52
FIGURA 42 – Software MPLAB IDE ............................................................... 54
FIGURA 43 – Servomotor utilizado ............................................................... 55
FIGURA 44 – Conector do servomotor ......................................................... 56
FIGURA 45 – Sinal PWM na saída do microcontrolador ............................. 57
FIGURA 46 – Braço mecânico sem os servomotores ................................. 57
FIGURA 47 – Braço mecânico completo ...................................................... 58
FIGURA 48 – Componentes interligados para testes .................................. 59
FIGURA 49 – Fonte de tensão contínua utilizada ........................................ 59
FIGURA 50 – Osciloscópio utilizado ............................................................. 60
FIGURA 51 – Multímetro utilizado ................................................................. 60
FIGURA 52 – Interferência entre o movimento dos servomotores ............ 61
LISTA DE TABELAS
TABELA 1 – Faixa de frequencia de vários sinais biopotenciais ............... 40
TABELA 2 – Características do PIC 18F4550 ............................................... 49
SUMÁRIO
1 INTRODUÇÃO .............................................................................................. 15
1.1 Objetivo Geral ........................................................................................... 15
1.2 Objetivos Específicos .............................................................................. 16
1.3 Justificativa ............................................................................................... 16
2 REVISÃO BIBLIOGRÁFICA ........................................................................ 16
2.1 Eletrofisiologia ......................................................................................... 17
2.1.1 Eletrooculagrafia ................................................................................... 18
2.2 Bioamplificadores .................................................................................... 21
2.2.1 Ganho (Av) ............................................................................................. 21
2.2.2 Resposta em Frequência ...................................................................... 22
2.2.3 Ruído e Drift ........................................................................................... 23
2.2.4 Impedância de Entrada ......................................................................... 23
2.2.5 Amplificadores de Instrumentação ...................................................... 24
2.3 Microcontrolador ...................................................................................... 25
2.3.1 Apresentação do PIC ............................................................................ 26
2.3.2 A Linguagem C ...................................................................................... 27
2.4 Servomotores ........................................................................................... 27
2.4.1 Características do servomotor ............................................................. 28
2.4.2 Funcionamento do servomotor ............................................................ 30
2.4.3 Tipos de servomotores ......................................................................... 33
3 DESENVOLVIMENTO ................................................................................. 34
3.1 Metodologia da colocação dos eletrodos .............................................. 34
3.2 Captação da diferença de potencial elétrica .......................................... 35
3.3 Circuito Bioamplificador .......................................................................... 36
3.3.1 Amplificador Instrumental INA 114 ...................................................... 38
3.3.2 Filtros ..................................................................................................... 40
3.3.3 Filtro Passa - Alta .................................................................................. 41
3.3.4 Estágio de ganho .................................................................................. 42

3.3.5 Filtro Passa - Baixa ............................................................................... 43
3.3.6 Comparador ........................................................................................... 45
3.3.7 Circuito completo .................................................................................. 47
3.3.8 Considerações Adicionais .................................................................... 48
3.4 Microcontrolador ...................................................................................... 48
3.4.1 Configurações do microcontrolador PIC ........................................... 49
3.4.2 Lógica para programação do microcontrolador PIC ......................... 53
3.4.2.1 Lógica para a entrada horizontal (abre e fecha a garra) ................ 52
3.4.3 Software para programação – MPLAB IDE ........................................ 53
3.4.4 Considerações Adicionais ................................................................... 54
3.5 Servomotores ........................................................................................... 55
3.5.1 Sinais de entrada dos servomotores ................................................... 55
3.6 O Braço Mecânico .................................................................................... 57
4 TESTES E ANÁLISE DOS RESULTADOS .................................................. 59
5 CONCLUSÃO ............................................................................................... 63
REFERÊNCIAS................................................................................................ 65
APÊNDICES .................................................................................................... 67
ANEXOS............................................................................................................74

15
1 INTRODUÇÃO
Muitas vezes, há a necessidade de monitorar sinais biológicos internos ao
nosso corpo, tais como sinais provenientes do batimento cardíaco (ECG), de
contrações e distensões musculares (EMG), do pensamento (EEG) e do movimento
do globo ocular (EOG). No que se refere a indivíduos portadores de deficiência, os
sinais de ECG, EMG, EEG e EOG podem ser utilizados para a melhora da qualidade
de vida dos mesmos.
Alguns tipos de deficiência física podem fazer com que o paciente perca o
controle de determinados músculos de seu corpo, dificultando ou até mesmo
impossibilitando a interação do indivíduo com o meio à sua volta. Apesar das
dificuldades de locomoção e comunicação desses indivíduos, eles ainda apresentam
controle de determinados movimentos não afetados, como os movimentos do globo
ocular. Os sinais elétricos adquiridos desses movimentos podem ser interpretados,
para promover ações de comando e controle em próteses e em equipamentos, de
forma a facilitar a interação do indivíduo com o seu ambiente físico.
É essencial para sistemas desse tipo uma etapa de aquisição de sinais, que
faça a captação (de uma maneira não invasiva, por meio de eletrodos), amplificação
e tratamento dos sinais biológicos e os disponibilize para um microcontrolador, que
por sua vez, controla e comanda uma máquina eletromecânica.
Para que os movimentos da prótese sejam de acordo com os comandos do
próprio usuário, serão usados sensores (eletrodos) que captam os movimentos dos
olhos por uma diferença de potencial elétrico entre a córnea (positivo) e a retina
(negativa), estes sinais captados serão amplificados e filtrados por bioamplificadores
que os enviam para um microcontrolador, que por sua vez, controla e comando
servomotores para simular os movimentos de um braço humano em uma prótese
mecânica.
1.1 Objetivo Geral
O objetivo geral desse projeto é fazer o movimento de um braço mecânico
(com um grau de liberdade) através da captação, amplificação e processamento da
diferença de potencial ocular de uma pessoa normal.

16
1.2 Objetivos Específicos
Os objetivos específicos do projeto serão os seguintes:
Construir um circuito responsável pela captação, amplificação e tratamento
do sinal elétrico ocular;
Criar um código de programação para um microcontrolador comandar
servomotores, os quais irão movimentar um braço mecânico.
1.3 Justificativa
O principal motivo que levou o grupo a escolher o tema citado, é poder
desenvolver uma placa de aquisição de sinais biológicos, no caso de sinais que
captam os movimentos dos olhos por uma diferença de potencial elétrico entre a
córnea (positivo) e a retina (negativa). Pretende-se que a placa seja parte de um
sistema capaz de possibilitar um meio de comunicação e controle, para pessoas que
perderam alguns (ou todos) os seus movimentos musculares voluntários,
necessitando, para isto, da aquisição de sinais gerados pelo movimento ocular.
2 REVISÃO BIBLIOGRÁFICA
Nessa seção será exposta a explicação da origem da diferença de potencial
elétrica ocular, como fazer a captação dessa diferença de potencial, quais
dispositivos e circuitos eletrônicos são usados para bioamplificação do sinal, qual
dispositivo que comanda e controla uma máquina eletromecânica para
movimentação das partes mecânicas do braço.
17
2.1 Eletrofisiologia
Grande número de fenômenos biológicos importantes é acompanhado de
manifestações elétricas celulares, a eletrofisiologia é o ramo na medicina que estuda
esse fenômeno.
Em repouso, as células vivas apresentam diferença de potencial elétrico de
várias dezenas de milivolts através da membrana plasmática. A difusão de íons a
favor de gradientes de concentração é a mais importante causa de manifestação
elétrica em sistemas biológicos.
A diferença de potencial elétrica iônica está implicada em inúmeros processos
celulares, tais como movimentos do globo ocular (EOG), contração e distensão
muscular (EMG), batimento cardíaco (ECG), do pensamento (EEG) e de muitos
outros. Nesses casos particulares, os processos de difusão (potenciais de difusão) e
os transportes ativos (potenciais de bombas eletrogênicas) representam os
mecanismos básicos responsáveis pela polarização da membrana plasmática.
A gênese desse potencial está associada a mecanismos de transporte de
íons, que criam um meio iônico intracelular de composição distinta daquela do meio
iônico extracelular.
Uma notável característica de todas as células vivas é a diferença de
potencial existente intra e extracelular. Essa diferença de potencial usualmente varia
entre 10µV e 100 mV, com o interior da célula sendo eletronegativo em relação ao
exterior.
Os três principais íons (K+, Na+ e Cl-) participantes da geração do potencial
de membrana, nas células em geral, também desempenham outras importantes
ações em múltiplas células, em tecidos e órgãos humanos.
Assim a difusão de íons a favor de gradientes de concentração é a mais
importante causa de manifestação elétrica em sistemas biológicos. A combinação de
gradientes iônicos transmembranares com permeabilidade diferencial a íons é a
base para a geração da diferença de potencial elétrica.

18
2.1.1 Eletrooculagrafia
A eletrooculargrafia (EOG) é um exame de monitoração de sinais biológicos
provenientes do movimento do globo ocular, como pode ser visto na Figura 1 abaixo.
Esses sinais elétricos podem ser interpretados para promover ações para a melhora
da qualidade de vida dos indivíduos com o seu ambiente físico.
Figura 1 - A eletrooculargrafia (EOG)
Fonte: ALBERNAZ, 2012
Potenciais eletrooculográficos (sinais bioelétricos de EOG) são pequenos potenciais
elétricos, também conhecidos como potenciais entre a córnea e a retina, que são
proporcionais ao ângulo (ou a posição) dos olhos em relação à cabeça, na Figura 2 abaixo é
mostrado partes do olho humano.
Figura 2 - Partes do olho humano
Fonte: ALBERNAZ, 2012
19
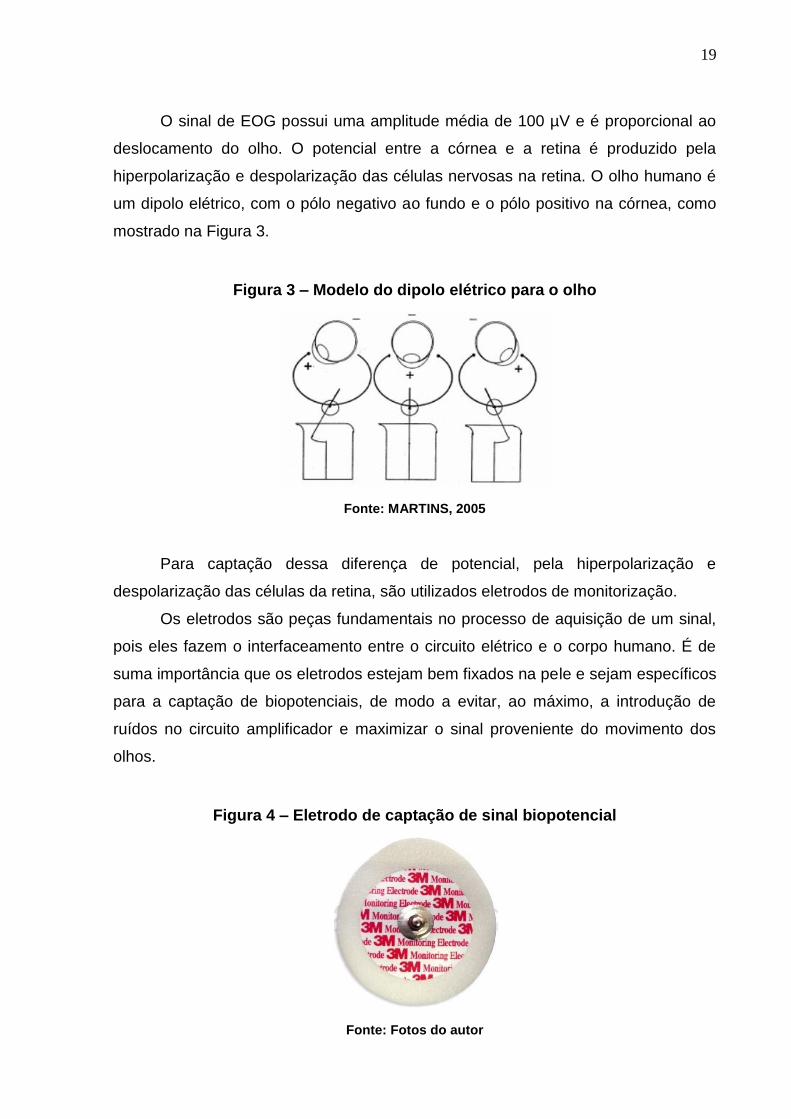
O sinal de EOG possui uma amplitude média de 100 µV e é proporcional ao
deslocamento do olho. O potencial entre a córnea e a retina é produzido pela
hiperpolarização e despolarização das células nervosas na retina. O olho humano é
um dipolo elétrico, com o pólo negativo ao fundo e o pólo positivo na córnea, como
mostrado na Figura 3.
Figura 3 – Modelo do dipolo elétrico para o olho
Fonte: MARTINS, 2005
Para captação dessa diferença de potencial, pela hiperpolarização e
despolarização das células da retina, são utilizados eletrodos de monitorização.
Os eletrodos são peças fundamentais no processo de aquisição de um sinal,
pois eles fazem o interfaceamento entre o circuito elétrico e o corpo humano. É de
suma importância que os eletrodos estejam bem fixados na pele e sejam específicos
para a captação de biopotenciais, de modo a evitar, ao máximo, a introdução de
ruídos no circuito amplificador e maximizar o sinal proveniente do movimento dos
olhos.
Figura 4 – Eletrodo de captação de sinal biopotencial
Fonte: Fotos do autor

20
Atualmente, a maioria dos eletrodos de biopotencial utilizados para a
captação dos movimentos oculares é descartável e, geralmente, vem com um gel
previamente aplicado em sua superfície, destinado a maximizar a transferência de
corrente elétrica do corpo para o eletrodo e subsequentemente para o circuito, esse
tipo de eletrodo é mostrado na Figura 4 acima.
Na área de contato do gel com o corpo, ocorrem trocas ion-elétron entre o
eletrodo e o eletrólito, o que resulta em uma tensão contínua (potencial DC)
conhecida como potencial de meia célula. Esses eletrodos, geralmente, são feitos de
ligas de cloreto de prata ou ouro. A colocação dos eletrodos no exame
eletrooculargrafia (EOG) é mostrada na Figura 5 abaixo.
Figura 5 – Colocação dos eletrodos para medição de sinais de EOG
Fonte: MARTINS, 2005
Coloca-se um eletrodo ao lado de cada olho para medição de movimentos
horizontais (eletrodos D e E). O eletrodo de referência (terra) é fixado no meio da
testa.
O sinal elétrico varia, aproximadamente, de 20 µV para cada variação de um
grau no movimento do olho, assim por esse sinal elétrico ser da ordem de milivolts,
tem que passar por um sistema de bioamplificação.
O bioamplificador deve ser capaz de lidar com sinais extremamente fracos na
presença dos potenciais de meia célula. Estes potenciais DC devem ser

21
considerados na seleção do ganho do bioamplificador, uma vez que eles
podem saturar o amplificador, o que impede a detecção de componentes de baixo
nível AC (corrente alternada).
2.2 Bioamplificadores
Quando o objetivo é captar sinais do corpo humano resultantes da atividade
eletrofisiológica (biopotenciais), em especial, da diferença potencial entre a córnea e
a retina do olho humano, deve-se tomar um extremo cuidado, pois esses sinais
possuem baixas amplitudes (da ordem de microvolts a milivolts). Desta forma, torna-
se necessário um dispositivo que amplifique esses sinais, no caso um amplificador
de biopotenciais ou bioamplificador.
Para que o mesmo atenda as especificações do projeto, alguns parâmetros
devem ser observados.
2.2.1 Ganho (Av)
Como já mencionado anteriormente, o sinal da atividade eletrofisiológica é
bem pequeno, da ordem de microvolts até milivolts. Assim o bioamplificador deve
possui um ganho (Av) de 1000 ou superior a isto. Este ganho geralmente é medido
em decibéis (dB). O ganho em dB, pode ser obtido por meio do ganho linear, pela
seguinte expressão:
Av(dB) = - 20 log10 (Ganho Linear)
22
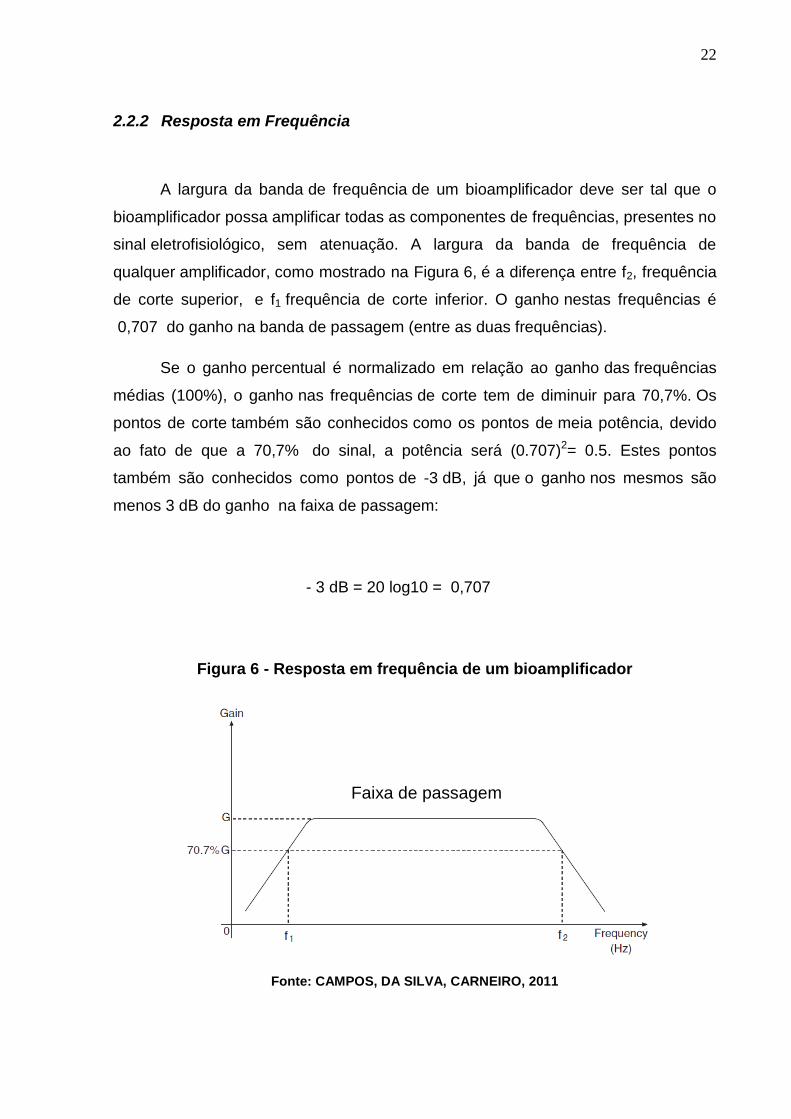
2.2.2 Resposta em Frequência
A largura da banda de frequência de um bioamplificador deve ser tal que o
bioamplificador possa amplificar todas as componentes de frequências, presentes no
sinal eletrofisiológico, sem atenuação. A largura da banda de frequência de
qualquer amplificador, como mostrado na Figura 6, é a diferença entre f2, frequência
de corte superior, e f1 frequência de corte inferior. O ganho nestas frequências é
0,707 do ganho na banda de passagem (entre as duas frequências).
Se o ganho percentual é normalizado em relação ao ganho das frequências
médias (100%), o ganho nas frequências de corte tem de diminuir para 70,7%. Os
pontos de corte também são conhecidos como os pontos de meia potência, devido
ao fato de que a 70,7% do sinal, a potência será (0.707)2= 0.5. Estes pontos
também são conhecidos como pontos de -3 dB, já que o ganho nos mesmos são
menos 3 dB do ganho na faixa de passagem:
- 3 dB = 20 log10 = 0,707
Figura 6 - Resposta em frequência de um bioamplificador
Fonte: CAMPOS, DA SILVA, CARNEIRO, 2011
Faixa de passagem

23
2.2.3 Ruído e Drift
Ruído e drift são sinais adicionais indesejáveis que contaminam o sinal de um
bioamplificador. Tanto o ruído, quanto o drift, são gerados dentro do
bioamplificador. O primeiro geralmente refere-se aos sinais indesejáveis com
componentes espectrais acima de 0,1 Hz, enquanto que o segundo refere-se `as
lentas mudanças na linha de base em frequências abaixo de 0,1 Hz.
2.2.4 Impedância de Entrada
A impedância de entrada de um bioamplificador deve ser suficientemente
elevada, para não atenuar consideravelmente o sinal eletrofisiológico a ser
medido. A Figura 7 apresenta esquema básico de um bioamplificador, destacando a
impedância de entrada. Cada interface eletrodo-tecido tem uma impedância finita
que depende de muitos fatores, tais como o tipo de camada de interface (por
exemplo, pele, gordura preparadas ou não), área de superfície do eletrodo, ou a
temperatura da interface do eletrólito.
Figura 7 – Impedância de entrada e polarização do eletrodo
Fonte: CAMPOS, DA SILVA, CARNEIRO, 2011
24
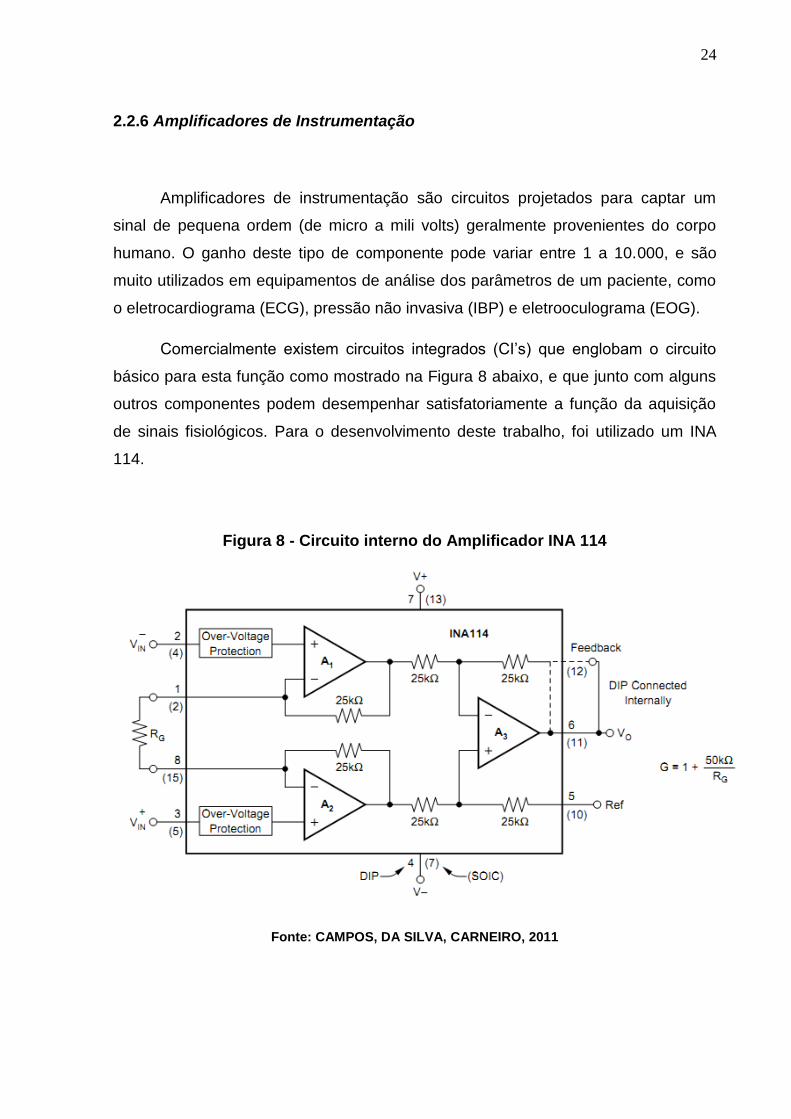
2.2.6 Amplificadores de Instrumentação
Amplificadores de instrumentação são circuitos projetados para captar um
sinal de pequena ordem (de micro a mili volts) geralmente provenientes do corpo
humano. O ganho deste tipo de componente pode variar entre 1 a 10.000, e são
muito utilizados em equipamentos de análise dos parâmetros de um paciente, como
o eletrocardiograma (ECG), pressão não invasiva (IBP) e eletrooculograma (EOG).
Comercialmente existem circuitos integrados (CI’s) que englobam o circuito
básico para esta função como mostrado na Figura 8 abaixo, e que junto com alguns
outros componentes podem desempenhar satisfatoriamente a função da aquisição
de sinais fisiológicos. Para o desenvolvimento deste trabalho, foi utilizado um INA
114.
Figura 8 - Circuito interno do Amplificador INA 114
Fonte: CAMPOS, DA SILVA, CARNEIRO, 2011
25
2.3 Microcontrolador
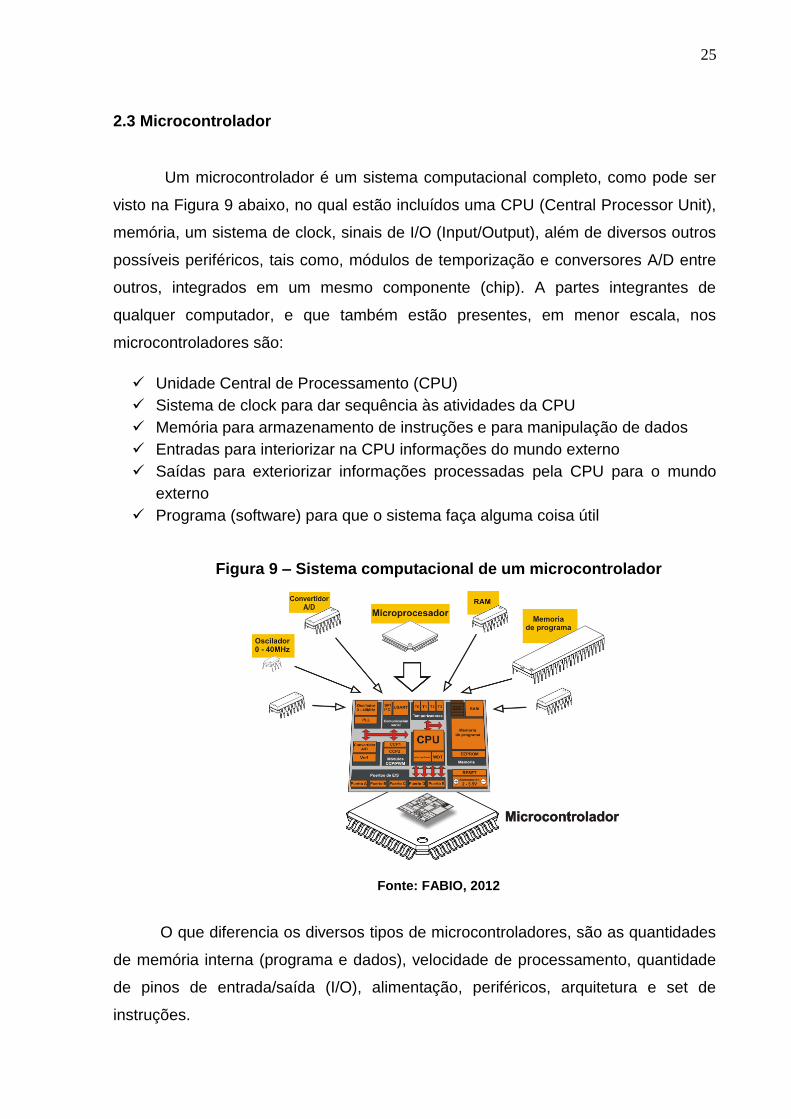
Um microcontrolador é um sistema computacional completo, como pode ser
visto na Figura 9 abaixo, no qual estão incluídos uma CPU (Central Processor Unit),
memória, um sistema de clock, sinais de I/O (Input/Output), além de diversos outros
possíveis periféricos, tais como, módulos de temporização e conversores A/D entre
outros, integrados em um mesmo componente (chip). A partes integrantes de
qualquer computador, e que também estão presentes, em menor escala, nos
microcontroladores são:
Unidade Central de Processamento (CPU)
Sistema de clock para dar sequência às atividades da CPU
Memória para armazenamento de instruções e para manipulação de dados
Entradas para interiorizar na CPU informações do mundo externo
Saídas para exteriorizar informações processadas pela CPU para o mundo
externo
Programa (software) para que o sistema faça alguma coisa útil
Figura 9 – Sistema computacional de um microcontrolador
Fonte: FABIO, 2012
O que diferencia os diversos tipos de microcontroladores, são as quantidades
de memória interna (programa e dados), velocidade de processamento, quantidade
de pinos de entrada/saída (I/O), alimentação, periféricos, arquitetura e set de
instruções.
26
2.3.1. Apresentação do PIC
O PIC é um circuito integrado produzido pela Microchip Technology Inc. , que
pertence a categoria dos microcontroladores, ou seja, um componente integrado que
em um único dispositivo contem todos os circuitos necessarios para realizar um
completo sistema digital programavel.
O PIC pode ser visto externamente como um circuito integrado TTL ou CMOS
normal, mas internamente dispõe de todos os dispositivos típicos de um sistema
microprocessado, como:
Uma CPU (Central Processor Unit ou Unidade de Processamento Central) e sua
finalidade é interpretar as instruções de programa;
Uma memória PROM (Programmable Read Only Memory ou Memória
Programavel Somente para Leitura) na qual ira memorizar de maneira
permanente as instruções do programa;
Uma memória RAM (Random Access Memory ou Memória de Acesso Aleatório)
utilizada para memorizar as variaveis utilizadas pelo programa;
Uma serie de LINHAS de I/O (entrada e saída) para controlar dispositivos
externos ou receber pulsos de sensores, chaves, etc. ;
Uma serie de dispositivos auxiliares ao funcionamento, ou seja, gerador de
clock, bus, contador, etc.
A presença de todos estes dispositivos em um espaço extremamente
pequeno, da ao projetista ampla gama de trabalho e enorme vantagem em usar um
sistema microprocessado, onde em pouco tempo e com poucos componentes
externos podemos fazer o que seria oneroso fazer com circuitos tradicionais.
O PIC esta disponível em uma ampla gama de modelos para melhor adaptar-
se as exigências de projetos específicos, diferenciando-se pelo numero de linha de
I/O e pelo conteúdo do dispositivo. Inicia-se com modelo pequeno identificado pela
sigla PIC12Cxx dotado de 8 pinos, até chegar a modelos maiores com sigla
PIC17Cxx dotados de 40 pinos. Uma descrição detalhada da tipologia do PIC é
disponível no site da Microchip ( www.microchip.com ) , onde conseguimos encontrar
grandes e variadas quantidades de informações técnicas, software de apoio,
exemplos de aplicações e atualizações disponíveis.

27
2.3.2. A Linguagem C
C é uma linguagem de programação compilada de propósito geral,
estruturada, imperativa, procedural, padronizada pela ISO, criada em 1972, por
Dennis Ritchie, no AT&T Bell Labs, para desenvolver o sistema operacional Unix
(que foi originalmente escrito em Assembly).
A linguagem C é uma das linguagens de programação mais populares e
existem poucas arquiteturas para as quais não existem compiladores para C. C foi
útil para muitas aplicações que foram codificadas originalmente em Assembly.
Essa propriedade não foi acidental, a linguagem C foi criada com o objetivo
principal em mente, facilitar a criação de programas extensos com menos erros,
recorrendo ao paradigma da programação procedural, mas sobrecarregando menos
o autor do compilador, cujo trabalho complica-se ao ter de realizar as características
complexas da linguagem.
Uma consequência da aceitação geral da linguagem C é que frequentemente
os compiladores, bibliotecas e até intérpretes de outras linguagens de nível maior
sejam eles próprios implementados em C.
C tem como ponto forte, a sua eficiência e é a linguagem de programação
preferida para o desenvolvimento de sistemas e softwares de base, apesar de
também ser usada para desenvolver programas de computador. Outra característica
importante de C, é sua proximidade do código de máquina, que permite que um
projetista seja capaz de fazer algumas previsões de como o software irá se
comportar, ao ser executado.
2.4 Servomotores
Servomotor é uma máquina, mecânica ou eletromecânica, que apresenta
movimento proporcional a um comando, em vez de girar ou se mover livremente
sem um controle mais efetivo de posição como a maioria dos motores, um
servomotor é mostrado na Figura 10 a seguir.

28
Figura 10 - Servomotor
Fonte: SANTOS, 2007
Os servomotores possuem um elevado torque em malha fechada. Ao existir
um sinal aplicado na entrada, o servo motor manterá a posição angular do eixo.
Ocorrendo uma mudança de sinal, a posição angular do eixo se altera , tendo assim
grande precisão no seu ângulo de giro. O servo é composto de duas partes: o
estator que a parte fixa, e outra móvel, o rotor.
Os servomotores são recursos utilizados em máquinas e equipamentos, tendo
grande utilização na robótica, os servomotores são classificados por AC Síncrono e
Assíncrono e o Servomotor DC. Cada qual tem sua verdadeira aplicação que devem
ser bem analisados.
2.4.1 Características do servomotor
A característica mais marcante de um servomotor é a sua capacidade de
movimentar o seu braço até uma posição e manter, mesmo que este seja forçado
em outra direção. As exigências básicas de um servomotor são: dinâmica, controle
de rotação, torque constante e precisão de posicionamento. Ainda se tem nele a
vantagem da possibilidade de se controlar o torque no eixo de forma constante e em
larga faixa de rotação.
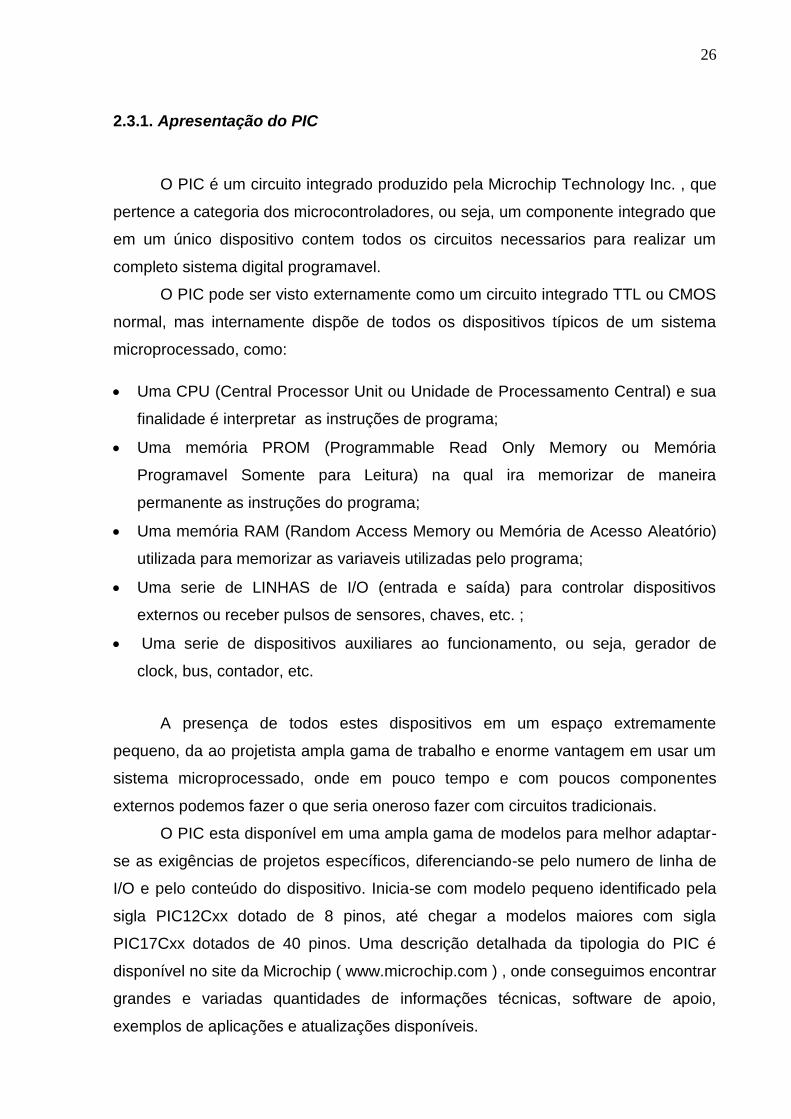
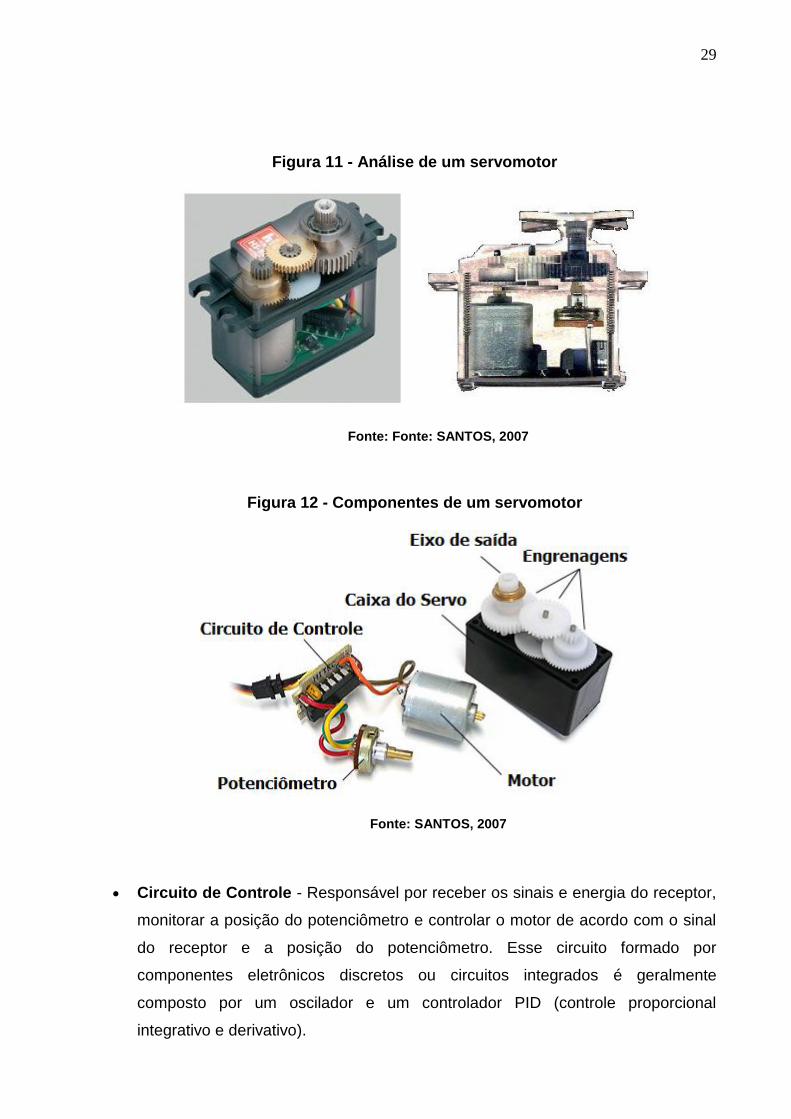
Para entender melhor o servo, temos que analisá-lo por dentro e observar
todos componentes, como mostrado nas Figuras 11 e 12 abaixo.
29
Figura 11 - Análise de um servomotor
Fonte: Fonte: SANTOS, 2007
Figura 12 - Componentes de um servomotor
Fonte: SANTOS, 2007
Circuito de Controle - Responsável por receber os sinais e energia do receptor,
monitorar a posição do potenciômetro e controlar o motor de acordo com o sinal
do receptor e a posição do potenciômetro. Esse circuito formado por
componentes eletrônicos discretos ou circuitos integrados é geralmente
composto por um oscilador e um controlador PID (controle proporcional
integrativo e derivativo).

30
Potenciômetro - Ligado ao eixo de saída do servo, monitora a posição do
mesmo. O valor de sua resistência elétrica indica a posição angular em que se
encontra o eixo. A qualidade desse potenciômetro vai interferir na precisão,
estabilidade e vida útil do servomotor.
Motor - Movimenta as engrenagens e o eixo principal do servo.
Engrenagens - Forma uma caixa de redução com uma relação bem longa, o que
ajuda a amplificar o torque, reduz a rotação do motor, transferem mais força ao
eixo de saída e movimentam o potenciômetro junto com o eixo.
Eixo de saída – Transfere o torque de saída em algum movimento específico.
Caixa do servo – Protege todos os componentes.
2.4.2 Funcionamento do servomotor
Servos possuem três fios de interface, dois para alimentação e um para o sinal
de controle, porém cada fabricante possui um padrão de cor para cada fio, como
mostrado na Figura 13 abaixo.
Figura 13 - Fios de interface
Fonte: SANTOS, 2007

31
Cada servo é ligado a um canal diferente do receptor e recebe um sinal no
formato PWM ( Pulse Width Modulation ), este sinal pode ter 0Volts ou 5Volts.
O circuito de controle do servo fica monitorando este sinal em intervalos de
20ms ( mili segundos ), como mostrador na Figura 14 abaixo.
Figura 14 - Sinal PWM
Fonte: SANTOS, 2007
Se dentro deste intervalo ele percebe uma alteração do sinal de 0v para 5v
durante 1ms até 2ms ele altera a posição do seu eixo para coincidir com o sinal que
recebeu.
Um sinal de 1ms corresponde a uma posição do braço do servo todo a
esquerda ou 0º, como mostrado na Figura 15 abaixo.
Figura 15 - Sinal de 1ms
Fonte: SANTOS, 2007
Um sinal de 1,5ms é a posição central do servo ou 90º, como mostrado na
Figura 16 abaixo.
Figura 16 - Sinal de 1,5 ms
Fonte: SANTOS, 2007
32
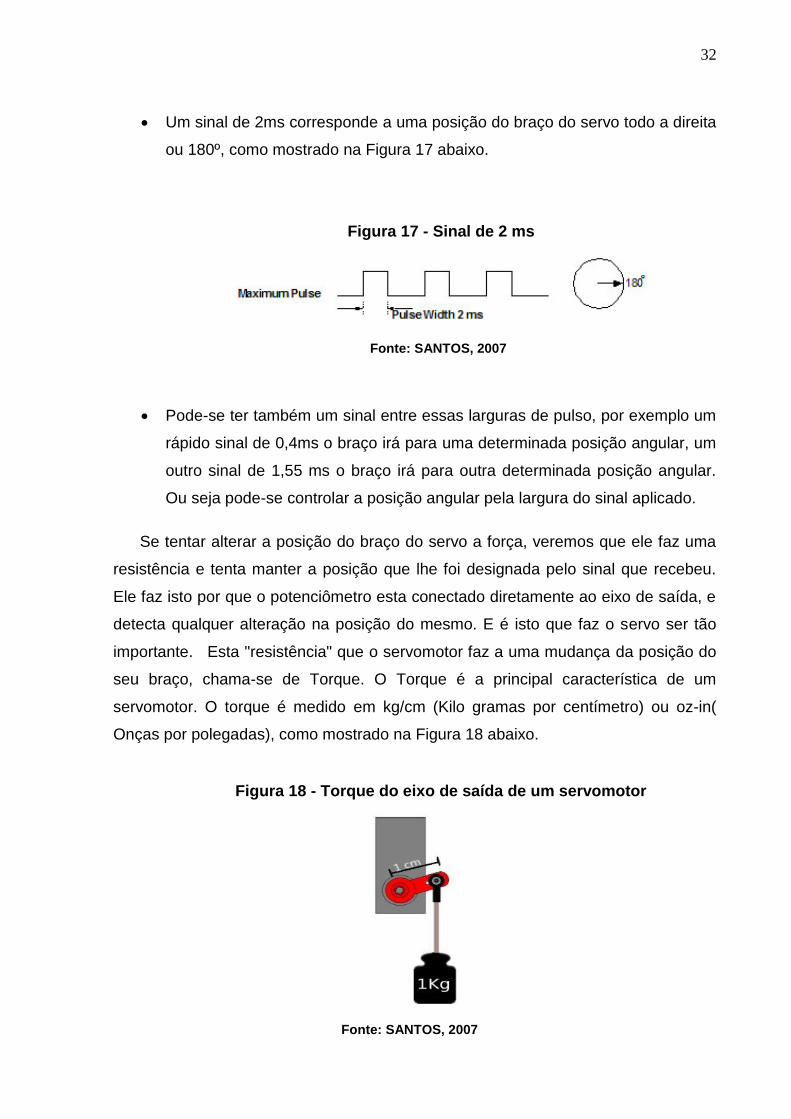
Um sinal de 2ms corresponde a uma posição do braço do servo todo a direita
ou 180º, como mostrado na Figura 17 abaixo.
Figura 17 - Sinal de 2 ms
Fonte: SANTOS, 2007
Pode-se ter também um sinal entre essas larguras de pulso, por exemplo um
rápido sinal de 0,4ms o braço irá para uma determinada posição angular, um
outro sinal de 1,55 ms o braço irá para outra determinada posição angular.
Ou seja pode-se controlar a posição angular pela largura do sinal aplicado.
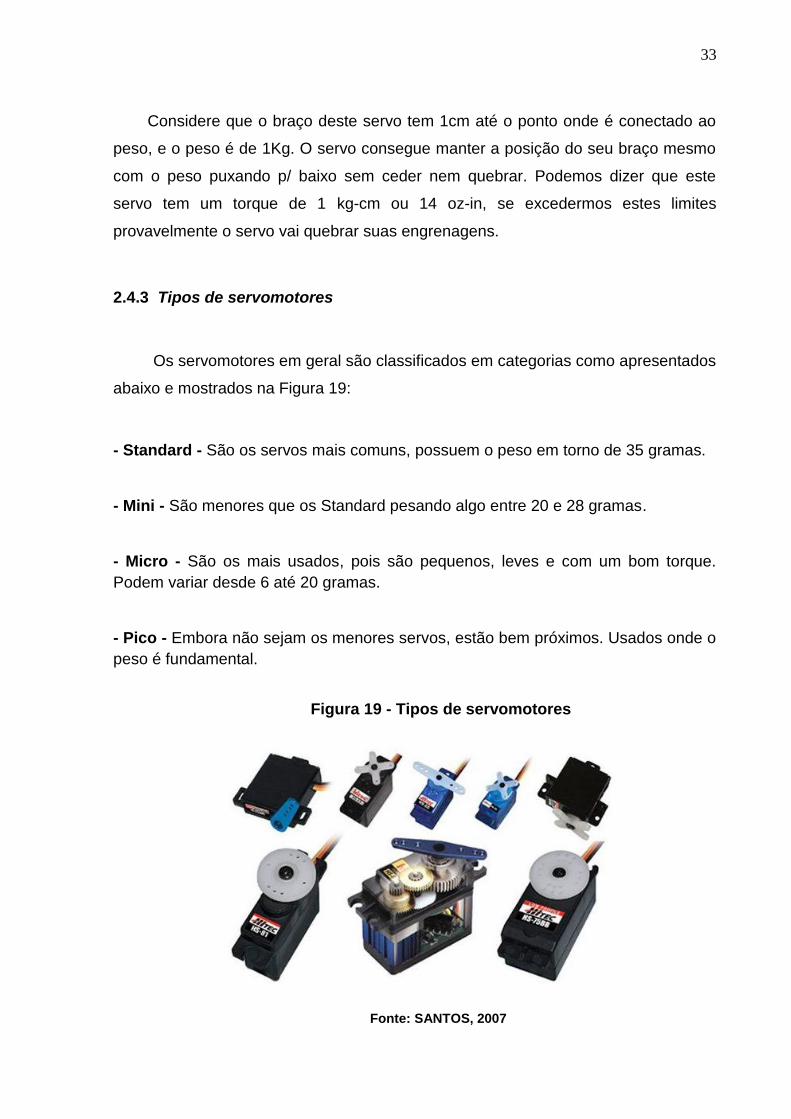
Se tentar alterar a posição do braço do servo a força, veremos que ele faz uma
resistência e tenta manter a posição que lhe foi designada pelo sinal que recebeu.
Ele faz isto por que o potenciômetro esta conectado diretamente ao eixo de saída, e
detecta qualquer alteração na posição do mesmo. E é isto que faz o servo ser tão
importante. Esta "resistência" que o servomotor faz a uma mudança da posição do
seu braço, chama-se de Torque. O Torque é a principal característica de um
servomotor. O torque é medido em kg/cm (Kilo gramas por centímetro) ou oz-in(
Onças por polegadas), como mostrado na Figura 18 abaixo.
Figura 18 - Torque do eixo de saída de um servomotor
Fonte: SANTOS, 2007
33
Considere que o braço deste servo tem 1cm até o ponto onde é conectado ao
peso, e o peso é de 1Kg. O servo consegue manter a posição do seu braço mesmo
com o peso puxando p/ baixo sem ceder nem quebrar. Podemos dizer que este
servo tem um torque de 1 kg-cm ou 14 oz-in, se excedermos estes limites
provavelmente o servo vai quebrar suas engrenagens.
2.4.3 Tipos de servomotores
Os servomotores em geral são classificados em categorias como apresentados
abaixo e mostrados na Figura 19:
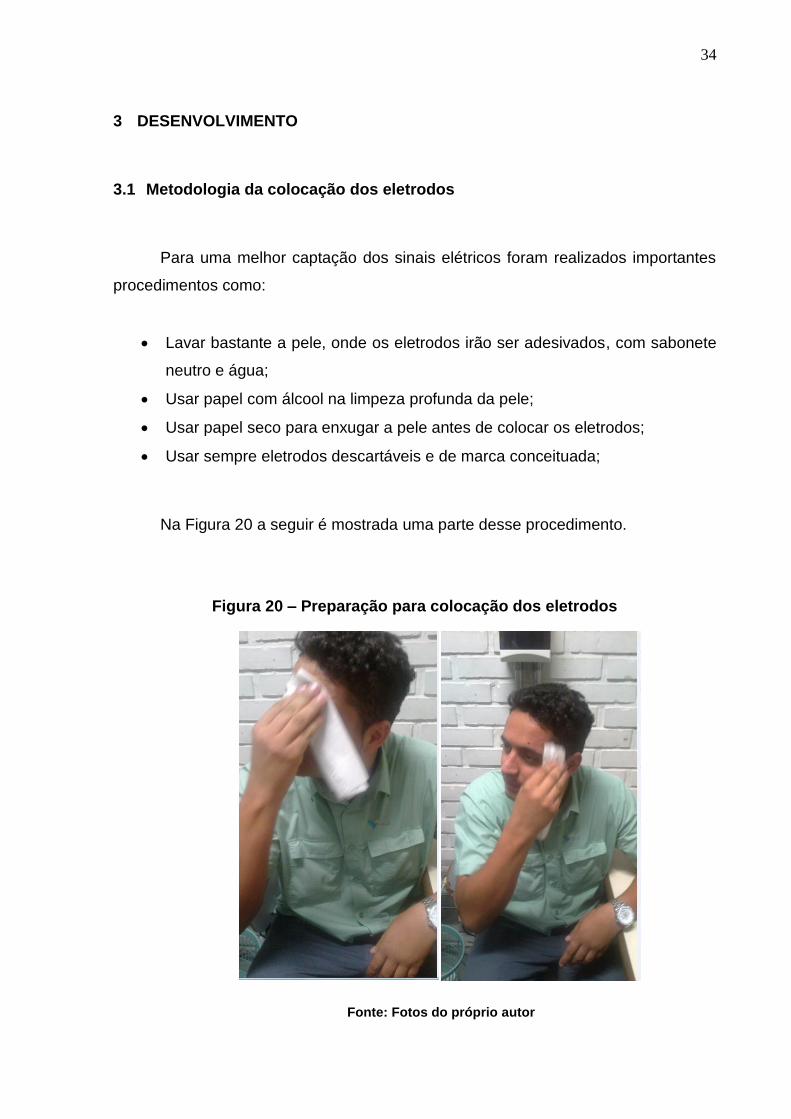
- Standard - São os servos mais comuns, possuem o peso em torno de 35 gramas.
- Mini - São menores que os Standard pesando algo entre 20 e 28 gramas.
- Micro - São os mais usados, pois são pequenos, leves e com um bom torque.
Podem variar desde 6 até 20 gramas.
- Pico - Embora não sejam os menores servos, estão bem próximos. Usados onde o
peso é fundamental.
Figura 19 - Tipos de servomotores
Fonte: SANTOS, 2007
34
3 DESENVOLVIMENTO
3.1 Metodologia da colocação dos eletrodos
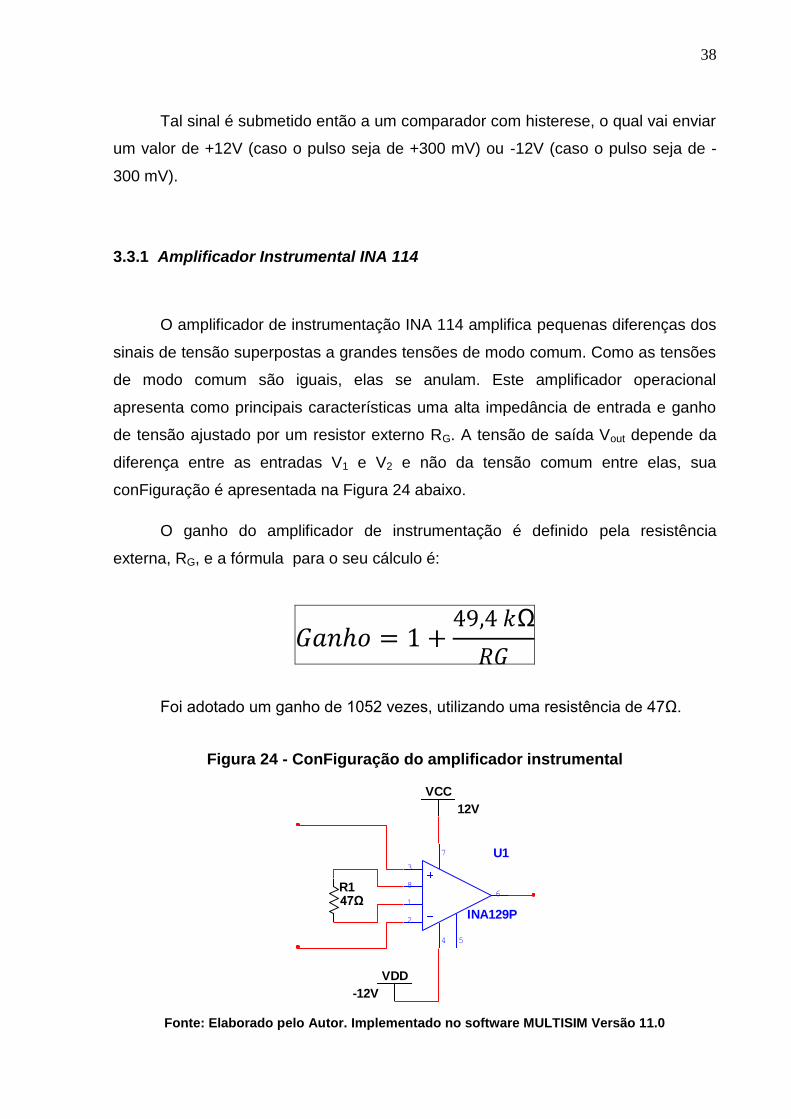
Para uma melhor captação dos sinais elétricos foram realizados importantes
procedimentos como:
Lavar bastante a pele, onde os eletrodos irão ser adesivados, com sabonete
neutro e água;
Usar papel com álcool na limpeza profunda da pele;
Usar papel seco para enxugar a pele antes de colocar os eletrodos;
Usar sempre eletrodos descartáveis e de marca conceituada;
Na Figura 20 a seguir é mostrada uma parte desse procedimento.
Figura 20 – Preparação para colocação dos eletrodos
Fonte: Fotos do próprio autor

35
3.2 Captação da diferença de potencial ocular
Dentre os eletrodos disponíveis no mercado, optou-se pelo eletrodo especial
descartável 2223 da 3M, ilustrado na Figura 21, devido à disponibilidade encontrada
no mercado e a melhor captação dos sinais.
Figura 21 – Eletrodos para captação do sinal elétrico
Fonte: Fotos do próprio autor
São utilizados 03 eletrodos para captação do sinal elétrico do movimento
ocular. Esses eletrodos possuem alta adesividade para pele, gel sólido (para
absorver a umidade da pele), pino de aço inoxidável (para conexão com as garras
dos cabos de transmissão) e contra-pino de cloreto de prata (AgCl).
Foi adotado um padrão para colocação dos eletrodos, sendo o mesmo
descrito a seguir, na Figura 22 abaixo é mostrado os locais de colocação dos
eletrodos para captação do sinal:
Garra Verde: é a garra referência. É posicionada no centro da testa do
usuário. O eletrodo onde esta garra vai ser fixada deve estar a uma distância
de aproximadamente 2 cm acima da linha da sobrancelha.
Garra Preta: eletrodo posicionado na altura da linha do olho esquerdo.
Garra Branca: eletrodo posicionado na altura da linha do olho direito.

36
Figura 22 – Locais de colocação dos eletrodos
Fonte: Fotos do próprio autor.
É importante frisar que o simples fato de não se posicionar corretamente os
eletrodos faz com que o INA 114 sature, e sua saída fica constante em +/- 12V.
3.3 Circuito Bioamplificador
A seguir é apresentado o desenvolvimento do circuito bioamplificador utilizado
no projeto. O mesmo foi dividido em blocos, de modo que se torne mais clara a
função de cada componente, a Figura 23 apresenta esse diagrama em blocos.

37
Figura 23 - Diagrama em blocos do bioamplificador
Fonte: Elaborado pelo próprio autor
A função deste circuito é amplificar o sinal proveniente dos olhos de modo
que o mesmo possa ser reconhecido pelo microcontrolador. A diferença de potencial
existente no olho de uma pessoa possui amplitude na faixa de 10 a 100 µV, e
freqüência entre 0 e 100Hz.
Este amplificador, para altos ganhos, pode apresentar um nível de tensão
contínua (offset) elevada. Para solucionar este problema foi utilizado um filtro passa-
alta de primeira ordem com freqüência de corte em 16 Hz. Sem a componente CC é
possível amplificar novamente o sinal a fim de se obter amplitudes na ordem de
alguns volts, sem saturação. Neste caso foi utilizado um amplificador não inversor de
ganho variável que pode amplificar até 51 vezes.
É importante salientar que o amplificador foi usado após o filtro ativo passa-
alta para que o nível CC não saturasse o sinal.
O sinal já amplificado passou por um filtro ativo de terceira ordem passa-baixa
com freqüência de corte em 30 Hz para atenuar as interferências provenientes de
altas freqüências.
Após passar pelo filtro ativo passa-baixa, já está delimitada uma faixa de
freqüência entre 16 Hz e 30 Hz, protegendo o circuito de ruídos que se encontram
fora deste intervalo. Após o filtro passa-baixa o sinal já encontra-se limpo (sem
ruídos) e com uma amplitude de aproximadamente 300 mV.
38
Tal sinal é submetido então a um comparador com histerese, o qual vai enviar
um valor de +12V (caso o pulso seja de +300 mV) ou -12V (caso o pulso seja de -
300 mV).
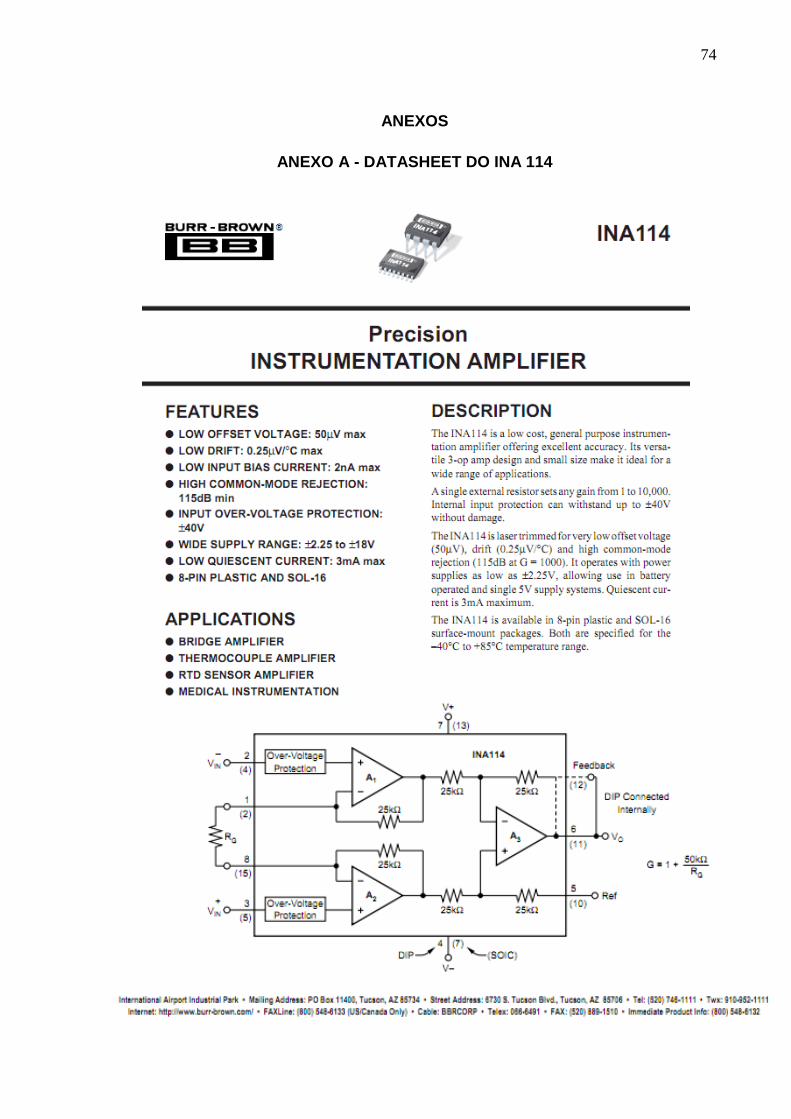
3.3.1 Amplificador Instrumental INA 114
O amplificador de instrumentação INA 114 amplifica pequenas diferenças dos
sinais de tensão superpostas a grandes tensões de modo comum. Como as tensões
de modo comum são iguais, elas se anulam. Este amplificador operacional
apresenta como principais características uma alta impedância de entrada e ganho
de tensão ajustado por um resistor externo RG. A tensão de saída Vout depende da
diferença entre as entradas V1 e V2 e não da tensão comum entre elas, sua
conFiguração é apresentada na Figura 24 abaixo.
O ganho do amplificador de instrumentação é definido pela resistência
externa, RG, e a fórmula para o seu cálculo é:
𝐺𝑎𝑛ℎ𝑜 = 1 +49,4 𝑘Ω
𝑅𝐺
Foi adotado um ganho de 1052 vezes, utilizando uma resistência de 47Ω.
Figura 24 - ConFiguração do amplificador instrumental
Fonte: Elaborado pelo Autor. Implementado no software MULTISIM Versão 11.0
U1
INA129P
6
4
7
3
2
5
1
8R147Ω
VCC
12V
VDD
-12V
39
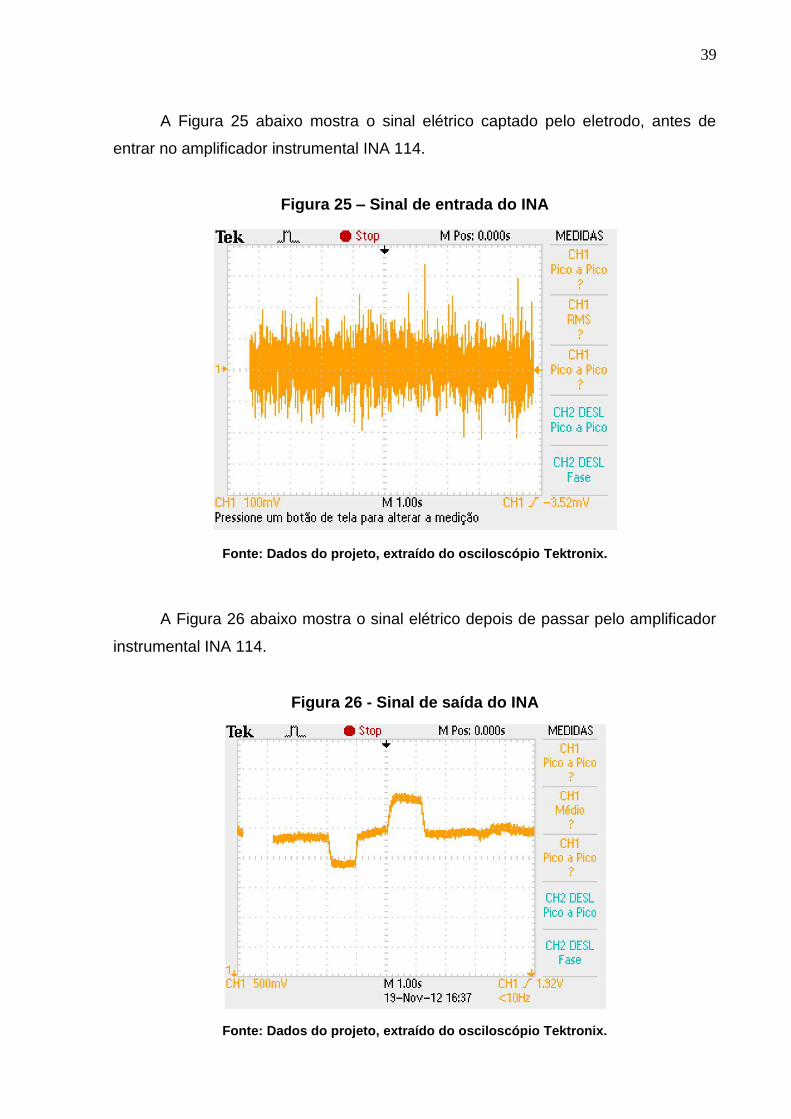
A Figura 25 abaixo mostra o sinal elétrico captado pelo eletrodo, antes de
entrar no amplificador instrumental INA 114.
Figura 25 – Sinal de entrada do INA
Fonte: Dados do projeto, extraído do osciloscópio Tektronix.
A Figura 26 abaixo mostra o sinal elétrico depois de passar pelo amplificador
instrumental INA 114.
Figura 26 - Sinal de saída do INA
Fonte: Dados do projeto, extraído do osciloscópio Tektronix.
40
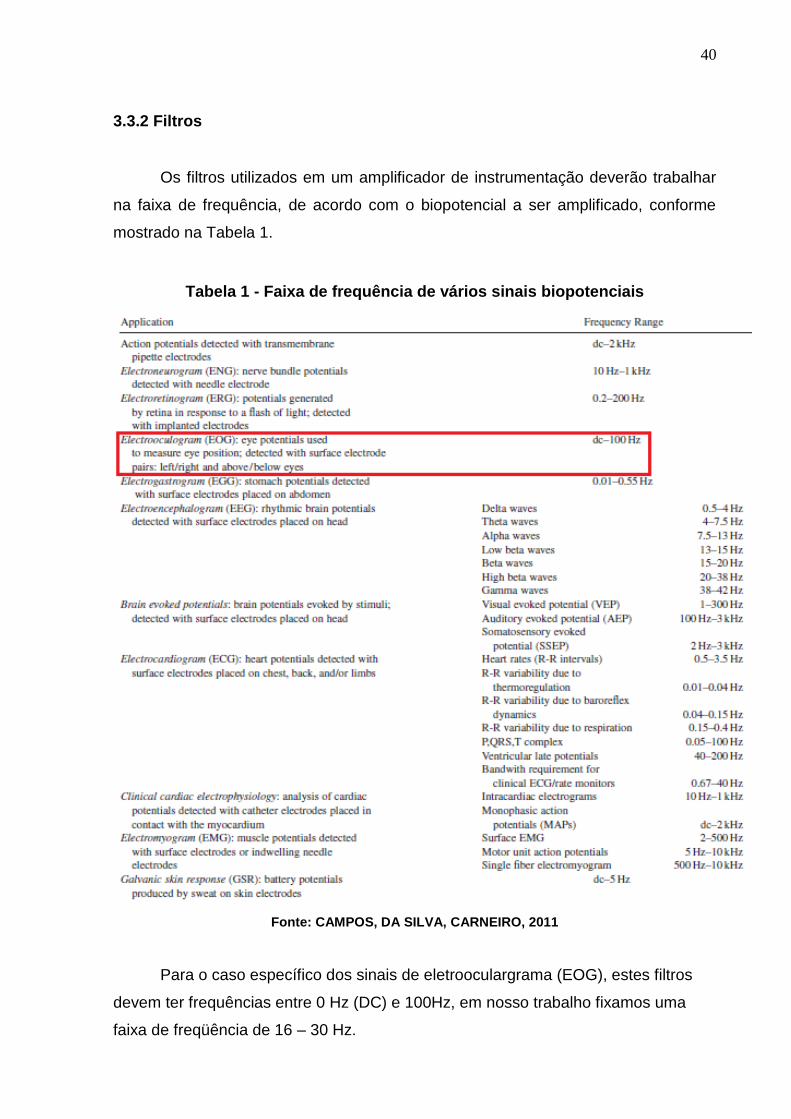
3.3.2 Filtros
Os filtros utilizados em um amplificador de instrumentação deverão trabalhar
na faixa de frequência, de acordo com o biopotencial a ser amplificado, conforme
mostrado na Tabela 1.
Tabela 1 - Faixa de frequência de vários sinais biopotenciais
Fonte: CAMPOS, DA SILVA, CARNEIRO, 2011
Para o caso específico dos sinais de eletrooculargrama (EOG), estes filtros
devem ter frequências entre 0 Hz (DC) e 100Hz, em nosso trabalho fixamos uma
faixa de freqüência de 16 – 30 Hz.
41
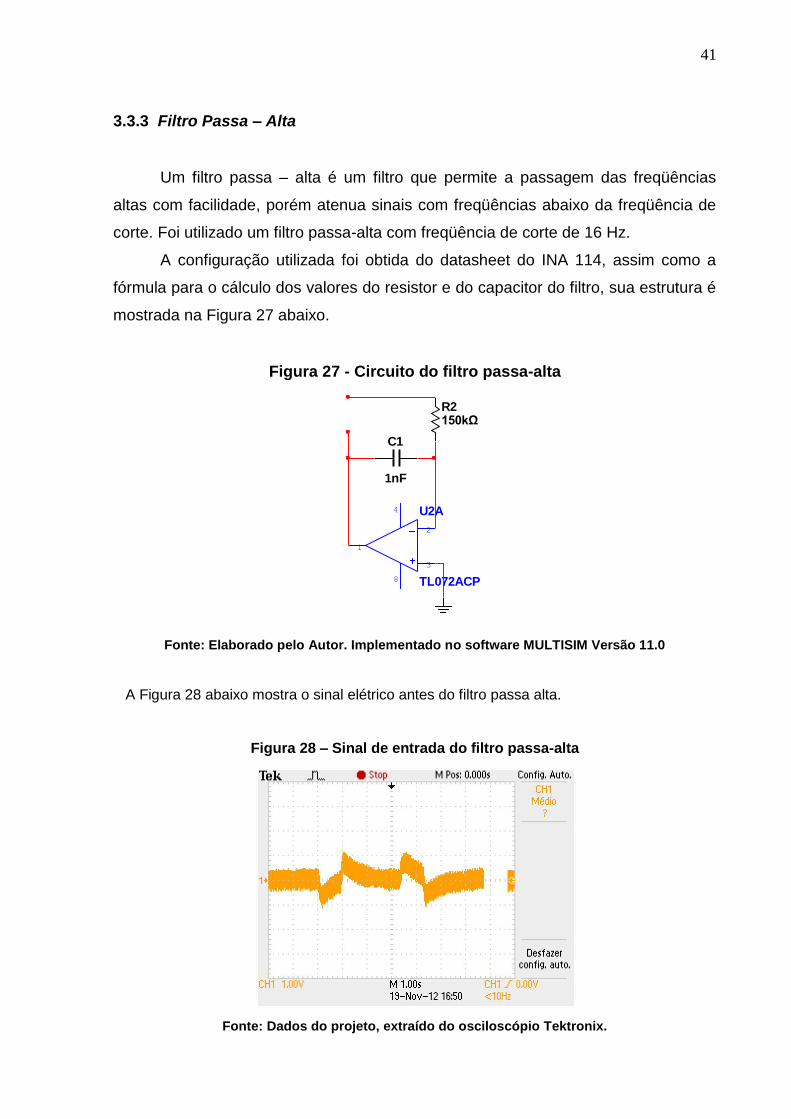
3.3.3 Filtro Passa – Alta
Um filtro passa – alta é um filtro que permite a passagem das freqüências
altas com facilidade, porém atenua sinais com freqüências abaixo da freqüência de
corte. Foi utilizado um filtro passa-alta com freqüência de corte de 16 Hz.
A configuração utilizada foi obtida do datasheet do INA 114, assim como a
fórmula para o cálculo dos valores do resistor e do capacitor do filtro, sua estrutura é
mostrada na Figura 27 abaixo.
Figura 27 - Circuito do filtro passa-alta
Fonte: Elaborado pelo Autor. Implementado no software MULTISIM Versão 11.0
A Figura 28 abaixo mostra o sinal elétrico antes do filtro passa alta.
Figura 28 – Sinal de entrada do filtro passa-alta
Fonte: Dados do projeto, extraído do osciloscópio Tektronix.
U2A
TL072ACP
3
2
4
8
1
C1
1nF
R2150kΩ
42
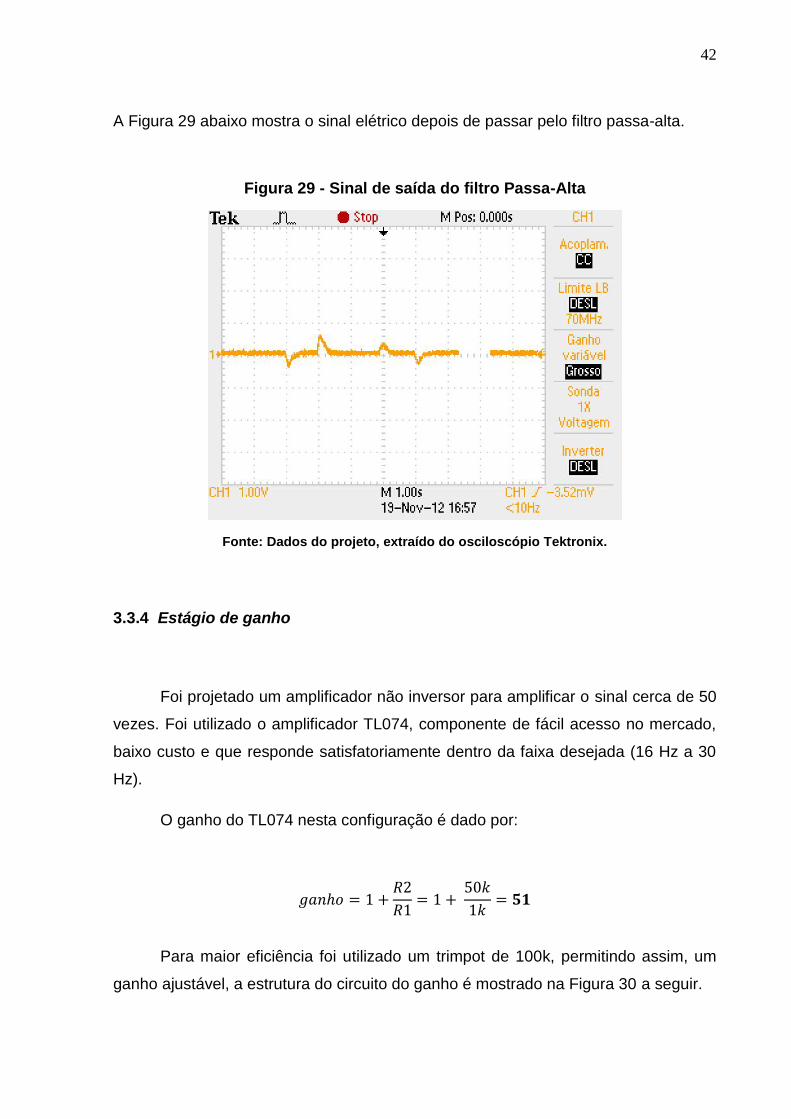
A Figura 29 abaixo mostra o sinal elétrico depois de passar pelo filtro passa-alta.
Figura 29 - Sinal de saída do filtro Passa-Alta
Fonte: Dados do projeto, extraído do osciloscópio Tektronix.
3.3.4 Estágio de ganho
Foi projetado um amplificador não inversor para amplificar o sinal cerca de 50
vezes. Foi utilizado o amplificador TL074, componente de fácil acesso no mercado,
baixo custo e que responde satisfatoriamente dentro da faixa desejada (16 Hz a 30
Hz).
O ganho do TL074 nesta configuração é dado por:
𝑔𝑎𝑛ℎ𝑜 = 1 +𝑅2
𝑅1= 1 +
50𝑘
1𝑘= 𝟓𝟏
Para maior eficiência foi utilizado um trimpot de 100k, permitindo assim, um
ganho ajustável, a estrutura do circuito do ganho é mostrado na Figura 30 a seguir.

43
Figura 30 - Circuito do estágio de ganho
Fonte: Elaborado pelo Autor. Implementado no software MULTISIM Versão 11.0
É importante salientar que os dois capacitores em paralelo situados na
entrada do amplificador não fazem parte desse estágio de ganho. Os mesmos foram
colocados nesse ponto para retirar uma componente CC existente na saída do
amplificador de instrumentação (INA 114).
Assim como o INA, a alimentação do TL074 foi de +/- 12V (+12V pino 4, e -
12V pino 11).
3.3.5 Filtro Passa – Baixa
Filtro passa-baixa é o nome comum dado a um circuito eletrônico que permite
a passagem de baixas freqüências e a atenuação de sinais com freqüências maiores
que a de corte. Na Figura 31 é apresentado o circuito do filtro ativo passa baixa de
3ª ordem, tipo butterworth, com freqüência de corte de 30 Hz.

44
Figura 31 - Circuito de um filtro ativo passa-baixa butterworth de 3ª ordem.
Fonte: Elaborado pelo Autor. Implementado no software MULTISIM Versão 11.0
Para encontrar os valores dos capacitores, foram realizados os seguintes cálculos:
𝑹𝟓 = 𝑹𝟔 = 𝑹𝟕 = 𝟒.𝟕𝒌Ω
𝝈 =𝟏
𝟐𝝅𝒇=
𝟏
𝟐𝝅𝟑𝟎= 𝟓,𝟑𝟎𝟓 𝒎𝒔
Mas, 𝝈 = 𝑹.𝑪
𝑿,𝑪 =
𝝈.𝑿
𝑹=
𝟓,𝟑𝟎𝟓𝒎𝑺.𝑿
𝟒.𝟕 𝒌= 𝟏,𝟏𝟐𝟗µ.𝑿
Assim temos:
𝑪𝟐 = 𝟔𝟕𝒏.𝟏,𝟑𝟗𝟐 = 𝟏,𝟓𝟕µ𝑭 ≈ 𝟐,𝟐µ𝑭
𝑪𝟑 = 𝟔𝟕𝒏.𝟑,𝟓𝟒𝟔 = 𝟒µ𝑭 ≈ 𝟔,𝟖µ𝑭
𝑪𝟒 = 𝟔𝟕𝒏.𝟎,𝟐𝟎𝟐𝟒 = 𝟐𝟐𝟖𝒏𝑭 ≈ 𝟑𝟑𝟎𝒏
R5
4.7kΩ
R6
4.7kΩ
R7
4.7kΩ
C22.2µF
C36.8µF
C4330nF
U5B
TL074ACN
5
6
11
4
7

45
A Figura 32 a seguir mostra o sinal elétrico depois de passar pelo filtro passa-baixa.
Figura 32 - Sinal de saída do Filtro Passa-Baixa
Fonte: Dados do projeto, extraído do osciloscópio Tektronix.
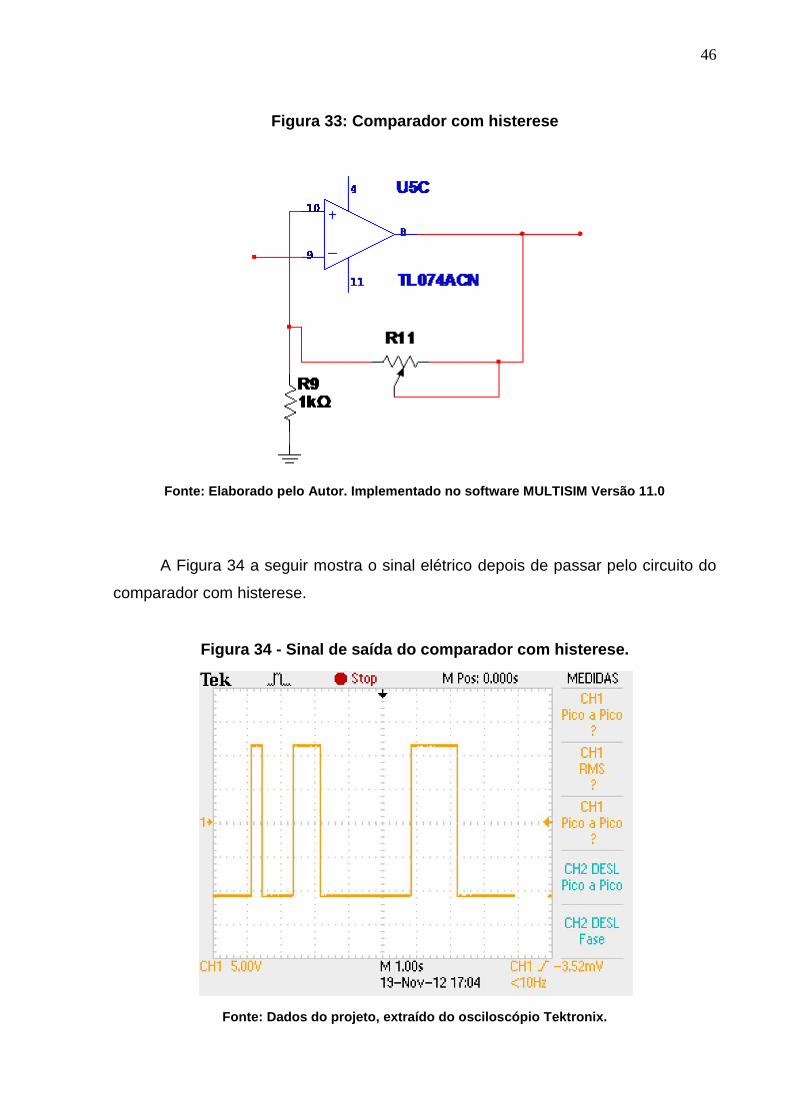
3.3.6 Comparador
O último estágio é a aplicação do sinal na entrada inversora de um
comparador com histerese. Desse modo o sinal de saída é saturado em +12V ou -
12V, sem valores intermediários. O potenciômetro é utilizado para ajustar o ganho
deste comparador.
Normalmente, uma pequena diferença de tensão, da ordem de 1mV, é
suficiente para acionar o comparador, levando-o a comutar sua condição de saída.
Evidentemente, amplificadores operacionais de alto ganho, quando utilizados como
comparadores, podem amplificar sinais de níveis bem menores que 1mV. Na Figura
33 é apresentado o circuito comparador utilizado.
46
Figura 33: Comparador com histerese
Fonte: Elaborado pelo Autor. Implementado no software MULTISIM Versão 11.0
A Figura 34 a seguir mostra o sinal elétrico depois de passar pelo circuito do
comparador com histerese.
Figura 34 - Sinal de saída do comparador com histerese.
Fonte: Dados do projeto, extraído do osciloscópio Tektronix.
47
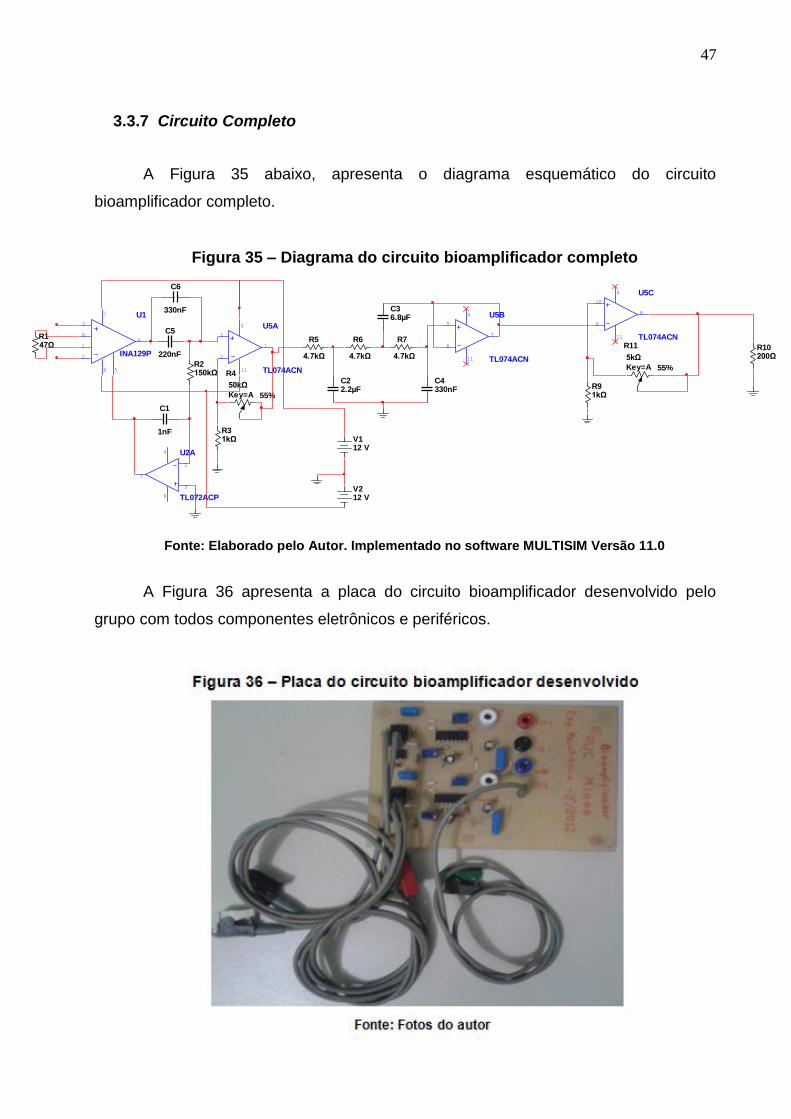
3.3.7 Circuito Completo
A Figura 35 abaixo, apresenta o diagrama esquemático do circuito
bioamplificador completo.
Figura 35 – Diagrama do circuito bioamplificador completo
Fonte: Elaborado pelo Autor. Implementado no software MULTISIM Versão 11.0
A Figura 36 apresenta a placa do circuito bioamplificador desenvolvido pelo
grupo com todos componentes eletrônicos e periféricos.
U1
INA129P
6
4
7
3
2
5
1
8R147Ω
U2A
TL072ACP
3
2
4
8
1
C1
1nF
R2150kΩ
U5A
TL074ACN
3
2
11
4
1
R31kΩ
R4
50kΩ
Key=A 55%
R5
4.7kΩ
R6
4.7kΩ
R7
4.7kΩ
C22.2µF
C36.8µF
C4330nF
U5B
TL074ACN
5
6
11
4
7
V112 V
V212 V
R91kΩ
U5C
TL074ACN
10
9
11
4
8
R10200Ω
R11
5kΩ
Key=A 55%
C5
220nF
C6
330nF

48
3.3.8 Considerações Adicionais
Após a saída do bioamplificador a amplitude do sinal varia entre +/- 12V.
Entretanto, o microcontrolador (PIC) que irá receber este sinal, não reconhece
tensões negativas. Dessa maneira foi colocado um diodo (1N4148) em série com
a saída do bioamplificador e ligado na entrada de um regulador de tensão de 5V
(78L05). O objetivo do diodo é reter a componente negativa do sinal, desse modo
somente os pulsos positivos chegarão para o PIC. A função do regulador é
ajustar o nível de tensão para um valor adequado ao microcontrolador, nesse
caso 5V.
Os potenciômetros de ajuste têm um comportamento estreitamente
dependente um do outro. Ao modificar o valor de um deles, o outro também deve
ser modificado até que se obtenha um ajuste bom do sinal. Empiricamente, foi
determinado um valor de 0,00 kΩ para o potenciômetro R4 do filtro passa-alta, e
um valor de 80,00 kΩ para o potenciômetro R11 do comparador com histerese. O
ajuste desses componentes mantém o funcionamento do circuito como descrito
anteriormente.
3.4 Microcontrolador
Após amplificação e tratamento do sinal no bioamplificador, o mesmo é
direcionado para o microcontrolador. Para este projeto utilizou-se o
microcontrolador PIC 18F4550, que será responsável por gerar o sinal de comando
para o servo motor, a tabela 2 a seguir apresenta as principais características do
PIC 18F4550.

49
Tabela 2 - Características do PIC 18F4550
NOME DO PARÂMETRO VALOR
Tipo de memória do programa Flash
Memória de programa 32 KB
Velocidade da CPU 12 MIPS
Bytes de memória RAM 2048
Dados EEPROM 256
Comunicação Digital Periféricos 1-A/E/USART; 1-MSSP(SSP/12C)
Capture/Compare/PWM Periféricos 1 CCP, 1 ECCP
Timers 1 x 8 bits, 3 x 16 bits
ADC 13 CH, 10-bit
Comparadores 2
USB(ch, velocidade, conformidade) 1 velocidade, full, USB 2.0
Faixa de temperatura -45oC a 85oC
Faixa de tensão de operação 2V a 5,5V
Contagem de pinos 40
Fonte: Elaborado pelo próprio autor
3.4.1 Configurações do microcontrolador PIC
A configuração dos pinos do PIC é apresenta na Figura 37 abaixo.

50
Figura 37 – Configuração dos pinos do PIC 18F4550
Fonte: MONTEIRO, 2011
A Figura 38 abaixo apresenta a o esquema de ligação dos pinos de entradas
analogicas e digitais, pinos de saídas digitais, pinos de ligação da tensão Vcc e
outros pinos importantes para implementação.
Figura 38 - Esquemático do PIC 18F4550
Fonte: MONTEIRO, 2011

51
Inicialmente, o sinal que sai do bioamplificador (+ ou – 12V) passa por um
diodo (para retirar a parte negativa do circuito) e por um regulador de tensão 78L05
(para abaixar a tensão para um nível aceitável pelo PIC, isto é, 5V), esse circuito é
mostrado na Figura 39 abaixo.
Figura 39- Circuito de regulagem do bioamplificador
Fonte: Elaborado pelo Autor. Implementado no software MULTISIM Versão 11.0
A partir desse ponto, o sinal é enviado para o pino 9 do microcontrolador. Este
sinal está ligado diretamente a uma variável que será utilizada na rotina do PIC
(entrada_horizontal).
Os pinos de alimentação do PIC também devem ser observados (11 e 32 em
5V, 12 e 31 no GND). Nesse ponto é importante salientar que todas as referências
do circuito foram ligadas no mesmo ponto, isto é, na referência da fonte simétrica
que fornece os +/- 12V. Portanto, os GND’s do circuito microcontrolador, do
bioamplificador, do servomotor, e de todos os instrumentos de medição
(osciloscópio, multímetro, etc.) também são ligados ali.
Além desses componentes o microcontrolador necessita de um cristal de
20MHz, que junto com dois capacitores de 22pF é ligado aos pinos 13 e 14 do PIC,
e ao terra (GND), esse circuito é apresentado na Figura 40 a seguir.
U1
LM7805CT
LINE VREG
COMMON
VOLTAGE
D1
1N4148

52
Figura 40 - Esquema de ligação do clock externo de 20MHz
Fonte: Elaborado pelo Autor. Implementado no software MULTISIM Versão 11.0
A saída do sinal PWM relativa à entrada 9 é o pino 16 do PIC, e está ligada
direto ao pino de sinal do servomotor que controla a abertura e fechamento da garra.
Por último e não menos importante, o pino de reset do microcontrolador (pino
1) deve ser ligado a um resistor de 10kΩ e ao VCC, e deve ser colocado um
capacitor de 100µF/25V entre o VCC e o GND do circuito.
A implementação em protoboard do microcontrolador PIC junto com seu
componentes eletrônicos de operação é mostrada na Figura 41 abaixo.
Figura 41 – Implementação do PIC
Fonte: Fotos do autor
V1
20MHz
5 V
C122pF
C222pF
pino14
pino13
53
3.4.2 Lógica para programação do microcontrolador PIC
O PIC irá receber em sua entrada o sinal proveniente do regulador de tensão,
o qual varia entre 0 e 5V. O momento em que o sinal estiver em 0V significa que o
usuário estará olhando para frente (como será descrito adiante, isso só ocorrerá
caso o usuário olhe para a esquerda e então para frente). Enquanto a entrada
horizontal estiver em nível alto (5V), significa que a pessoa está olhando para a
esquerda.
3.4.2.1 Lógica para a entrada horizontal (abre e fecha o braço)
Olhar para a esquerda significa abrir ou fechar o braço, isto é, o braço abre e
fecha alternadamente. Suponha que o usuário está olhando para frente, e o braço
está fechado. Quando o usuário olhar para a esquerda a entrada horizontal do PIC
ficará em nível alto, e nesse momento a garra começa a abrir. Caso o usuário volte
os olhos para frente antes do braço terminar seu movimento de abertura, ele irá
parar na posição em que estiver. Na próxima vez que a pessoa olhar para esquerda,
o braço irá começar a fechar. Dessa maneira, se a pessoa quiser fazer dois
movimentos de abertura seguidos, ela deve intercalá-los com uma rápida olhada
para esquerda (que nesse momento irá fechar a garra só um pouco).
Em resumo, o braço abre ou fecha sob o mesmo comando (olhar para a
esquerda), sendo estes movimentos alternados. Ora abre, ora fecha.
A Figura 42 a seguir apresenta o fluxograma da lógica de programação para
controle do braço mecânico.

54
Figura 42 – Fluxograma da programação
Fonte: Fotos do autor
3.4.3 Software para programação – MPLAB IDE
Para programar, editar o código, gerenciar o projeto, fazer testes, compilar o
programa e passar para o microcontrolador PIC, utilizamos o ambiente de
desenvolvimento integrado “MPLAB IDE”, como mostrado na Figura 43 abaixo.

55
Figura 43 – Software MPLAB IDE
Fonte: Fotos do autor
O código fonte da programação do PIC para controlar os servomotores está
em anexo.
3.4.4 Considerações Adicionais
Ao alimentar o circuito microcontrolador e o servomotor (ambos com 5V),
dependendo da qualidade da fonte utilizada, pode ser que haja a injeção de
ruído no PWM de saída do PIC, o que não permite ao servomotor um correto
funcionamento. Nesse caso recomenda-se o uso de uma fonte para alimentar
o PIC, e outra fonte para alimentar o servomotor. Entretanto, com uma fonte
confiável, a alimentação dos dois itens dá-se de maneira satisfatória.

56
3.5 Servomotores
Os servomotores que fazem os movimentos das articulações, são do
fabricante HEXTRONICK, modelo HX5010 com capacidade de torque de 6,5 kgf*cm,
alimentados por uma fonte de tensão de 4,8 até 6V (utilizamos 5V), velocidade
máxima de 0,16sec/60º, o material das engrenagens é Nylon e o peso é de 39,2 g
esse modelo é mostrado aberto conforme Figura 44 abaixo.
Figura 44 – Servomotor utilizado
Fonte: Fotos do autor
3.5.1 Sinais de entrada dos servomotores
O conector do servomotor possui 3 pinos, conforme configuração abaixo,
onde é mostrado na Figura 45 a seguir.
- GND (Marrom) - VCC +5Vcc (Vermelho) - Sinal de Controle (Amarelo)
Figura 45 – Conector do servomotor
Fonte: Fotos do autor

57
O sinal de controle é um PWM (Pulse Width Modulation) de período igual a
20ms, e Ton variável, que é justamente o que irá determinar a posição final do rotor.
O PIC é o responsável por enviar os PWM’s necessários ao servomotor, de modo
que se possa controlar a posição angular do mesmo.
O PIC possui 2 canais de saída de PWM, entretanto somente um deles é
necessário para controlar o movimento de abre e fecha da garra. A entradas do PIC
(a qual está ligada à saída do bioamplificador) é o pino 9(RE1). A saída é o pino
16(CCP2), e está ligado à entrada de controle do servomotor.
Ao iniciar o programa o PIC coloca 1ms de Ton na saída CCP2. Caso a
entrada RE1 estiver em nível alto, a saída CCP2 recebe um PWM de Ton igual a
1ms. Enquanto o nível alto permanecer, o Ton é incrementado repetidamente e o
PWM vai sendo alterado, de modo que o rotor vai girando gradativamente. Assim
que um nível baixo é detectado na entrada o Ton não é alterado, e portanto o PWM
em CCP2 permanece o mesmo (rotor fica parado). A próxima vez que a entrada ficar
em nível alto o Ton será decrementado gradativamente, e o rotor passará a girar no
sentido contrário.
Dessa maneira, toda vez que a entrada estiver em nível alto o rotor do
servomotor gira, sendo o sentido de movimento alternado a cada vez que a entrada
for de nível alto para baixo.
A Figura 46 abaixo apresenta a montagem do circuito microcontrolador, com a
captação do PWM no osciloscópio.
Figura 46 – Sinal PWM na saída do microcontrolador
Fonte: Fotos do autor

58
3.6 O Braço Mecânico
O braço mecânico utilizado no trabalho (vide Referências Bibliográficas) foi
construído com alumíno, para se obter o menor peso possível e assim executar os
movimentos com maior facilidade. O braço mecânico sem os servomotores é
mostrado na Figura 47 abaixo.
Figura 47 - Braço mecânico sem os servomotores
Fonte: Fotos do autor
Os servomotores foram acoplados ao braço de nylon, sendo que os
movimentos são transmitidos do servomotor para os membros através de pequenos
cabos plásticos, que deslizam no interior de pequenos tubos, a fim de possibilitar
flexibilidade aos movimentos.
Um servomotor transmite os movimentos dos dedos, onde o dedo polegar
movimenta o conjugado com os demais dedos. O braço mecânico completo com os
servomotores e suas transmissões de movimento é mostrado na Figura 48 abaixo.
Figura 48 - Braço mecânico completo
Fonte: Fotos do auto

59
4 TESTES E ANÁLISE DOS RESULTADOS
Após o desenvolvimento de todas as etapas do projeto apresentado
anteriormente, foi iniciada a fase de testes. A Figura 49 mostra o projeto nesta fase.
Figura 49 - Componentes interligados para testes
Fonte: Fotos do autor
Para realização dos testes foram utilizados uma fonte de tensão contínua, um
osciloscópio da marca TEXTRONIC e um multímetro digital, todos disponibilizados
nos laboratórios da PUC-Minas unidade Coração Euscarístico.
Figura 50 - Fonte de tensão contínua utilizada
Fonte: Fotos do autor
60
Figura 51: Osciloscópio utilizado
Fonte: Fotos do autor
Figura 52: Multímetro utilizado
Fonte: Fotos do autor
Ao longo do desenvolvimento do trabalho, muitas dificuldades e contratempos
foram sendo encontrados. Sinais analógicos com componentes CC, ruídos
indesejados, e desajustes dos potenciômetros de ganho são alguns dos exemplos.
Para a redução do ruído na captação do sinal, foram tomadas medidas como
o envolvimento de todos os cabos de entrada com papel alumínio, e filme plástico.
Isso faz com que o simples contato do corpo da pessoa com os cabos de aquisição
não injete ruído no circuito.
Percebeu-se que o posicionamento incorreto dos eletrodos na face do usuário
pode interferir no circuito, fazendo com que os sinais não sejam captados da

61
maneira desejada. Dessa forma deve ser tomado bastante cuidado no momento da
fixação dos eletrodos.
Outro problema encontrado foi o contato entre os rotores dos dois
servomotores do braço mecânico. Sempre que o servomotor girava para realizar a
abertura/fechamento da garra, seu rotor encostava no rotor do outro servo. Isso
atrapalhava o movimento do dispositivo, fazendo com que houvesse atrito
excessivo, prejudicando a rotação. Para corrigir este problema, teve de se alterar a
posição dos servomotores, afastando-os um do outro, de modo que não entrassem
em contato.
Figura 53: Interferência entre o movimento dos servomotores
Fonte: Fotos do autor
O fato de o usuário olhar para frente não necessariamente significa que a
saída do bioamplificador ficará em -12V. Isso depende do último movimento (olhar
para esquerda ou direita) que o usuário fez.
62
O pulso elétrico ocular é gerado no “movimento” dos olhos, isto é, o pulso
gerado quando o usuário olha do meio para a esquerda, é o mesmo pulso gerado
quando ele olha da direita para o meio (nesse caso, pulso positivo). Desse modo,
quando a pessoa olha para a esquerda, ela satura a saída do bioamplificador em
+12V, e quando ela volta os olhos para o meio, a saída vai para -12V. Nesse
momento, o fato do usuário ficar olhando para frente mantém a saída horizontal do
bioamplificador em -12V.
Analogamente, se a pessoa olhar para a direita, ela satura a saída do
bioamplificador em -12V (nesse momento nada irá mudar, pois a saída já estava
com esse valor de tensão), entretanto, no momento do retorno dos olhos para a
frente, é gerado um pulso positivo (olhar da direita para o meio), e a partir de então,
o fato da pessoa olhar para a frente mantém a saída do bioamplificador em +12V.
Para fins didáticos isso não é bom, pois a referência do PIC vai se alterar a
todo o momento. Portanto, antes de iniciar o controle do braço mecânico, é
recomendada uma olhada rápida para a esquerda, pois assim sempre que o usuário
olhar para frente a saída horizontal do bioamplificador estará em -12V (que após a
passagem pelo diodo, será igual a 0V).
De posse destes sinais, o PIC pode então processar suas rotinas de modo
que os movimentos do braço mecânico sejam executados perfeitamente.
Após todas as correções foi verificado que o braço mecânico responde
satisfatoriamente aos comandos do usuário. Sempre que a pessoa olha para a
esquerda ela consegue abrir ou fechar a garra (como salientado anteriormente tal
movimento é alternado, isto é, hora a garra abre, hora fecha). Vale frisar novamente
que para definir um padrão de movimento, inicialmente a pessoa deve olhar para a
esquerda e voltar os olhos para a frente. Isso ocorre porque o bioamplificador não
possui uma saída específica quando o usuário olha para frente (depende do estado
anterior).
Com o sucesso no controle da garra através do movimento horizontal dos
olhos, foi iniciada uma fase de testes (ainda não concluída) de captação dos
movimentos verticais dos olhos. Nesse ponto, já foi implementado na placa do
bioamplificador um circuito extra para processamento de tal sinal. Este componente
pode ser utilizado para controlar (paralelamente ao abre/fecha da garra) o
movimento de sobe/desce do braço mecânico.
63
5 CONCLUSÃO
Após a realização de estudos aprofundados sobre a eletrofisiologia, com o
objetivo de saber a origem dos sinais elétricos provenientes do movimento dos olhos,
estudos sobre todos componentes utilizados para construção do projeto (eletrodos,
amplificadores, tensão off-set, filtro passa-alta, ganho, filtro passa-baixa,
microcontrolador, código C, sinal PWM e servomotores), criação do circuito
bioaomplificador, criação do código de programação em Linguagem C da lógica de
movimento do braço mecânico (implementado no microcontrolador para comandar e
controlar os servomotores) e finalmente após realizar diversos testes de
funcionamento, chegamos a resultados satisfatórios, ou seja, conseguimos conquistar
nossos objetivos específicos e principalmente nosso objetivo geral, que era fazer o
movimento de um braço mecânico (com um grau de liberdade) através da captação,
amplificação e processamento da diferença de potencial ocular de uma pessoa.
A aplicabilidade desse projeto é imensa, principalmente na adaptação e
aumento da mobilidade de pessoas com deficiência. Com o simples movimento dos
olhos o usuário pode acionar uma campainha, se locomover através de um dispositivo
específico, mover objetos de lugar, etc.
Como sugestão para projetos futuros, fica a captação do movimento vertical
dos olhos para acionar o outro grau de liberdade da garra (movimento sobe/desce).
Neste ponto, inclusive, já foram iniciados alguns testes e criado o circuito de captação,
filtração e amplificação do sinal.

64
REFERÊNCIAS
PONTIFICIA UNIVERSIDADE CATÓLICA DE MINAS GERAIS. Pró-Reitoria de
Graduação. Sistema de Bibliotecas da PUC Minas. Padrão Puc Minas de
normalização: Normas da ABNT para apresentação de teses, dissertações,
monografias e trabalhos acadêmicos. 9. ed. rev. ampl. atual. Belo Horizonte: PUC
Minas, 2011.
CAMPOS, Guilherme Meireles; DA SILVA, José Ângelo; CARNEIRO, Tomás El
Abras. Braço Mecânico acionado por sinais de eletromiografia. 2011. Trabalho
de graduação – Pontifícia Universidade Católica de Minas Gerais, Departamento de
Engenharia Mecânica com Ênfase em Mecatrônica, Belo Horizonte.
VIDIGAL, Rafaela Nepomuceno e; SOUZA, Leonardo Vasconcelos de.
Desenvolvimento de equipamentos para abertura de linha de pesquisa em
engenharia de reabilitação. 2010. Relatório Técnico Final – Centro Federal de
Educação Tecnológica de Minas Gerais, Curso técnico de equipamentos
Biomédicos, Belo Horizonte.
MARTINS, Vinicius Ruiz. Desenvolvimento de uma placa de captura de sinais
biológicos com interface com computador. 2005. Projeto de graduação -
Universidade Federal do Espírito Santo, Departamento de Engenharia
Elétrica,Vitória.
DELATTRE, Edson. Fundamentos de eletrofisiologia: Potenciais de membrana.
2007. Temas de ensino - Unicamp, Departamento de Fisiologia e Biofísica, Ribeirão
Preto.
ALBERNAZ, Dr Pedro Luiz Mangabeira. Nistagmografia. 2007.Disponível em:
<http://www.brasilmedicina.com/especial/oto_t2s4s2s2.asp>. Acesso em: 08 ago.
2012.

65
CNZ ENGENHARIA. Programa Embedded Software. Apostila de Treinamento de
Microcontroladores. Cotia, [20--].
SANTOS, André. Como funciona um servo motor. Rio Grande do Sul: Artigo
Técnico Pictronis, 2007. Disponível em: <http://www.pictronics.com.br/artigos-
tecnicos/43-eletronica-e-automacao/89-como-funciona-um-servo-motor.html>.
Acesso em: 09 ago. 2012.
MONTEIRO, Duarte. Profecto Bridge. 12 junho 2011. Disponível em: <
http://project-bridge.blogspot.com.br/>. Acesso em: 22 set. 2012
TREVISAN, Pedro V. T. Microcontrolador. Disponível em: <
http://www.radioamadores.net/files/microcontroladores_pic.pdf/>. Acesso em: 06
nov. 2012
FABIO, Wellington. Microcontrolador PIC – Programação em C. Disponível em: <
http://www.ebah.com.br/content/ABAAABgW4AK/ap-a-es#/>. Acesso em: 06 nov.
2012
66
APÊNDICES
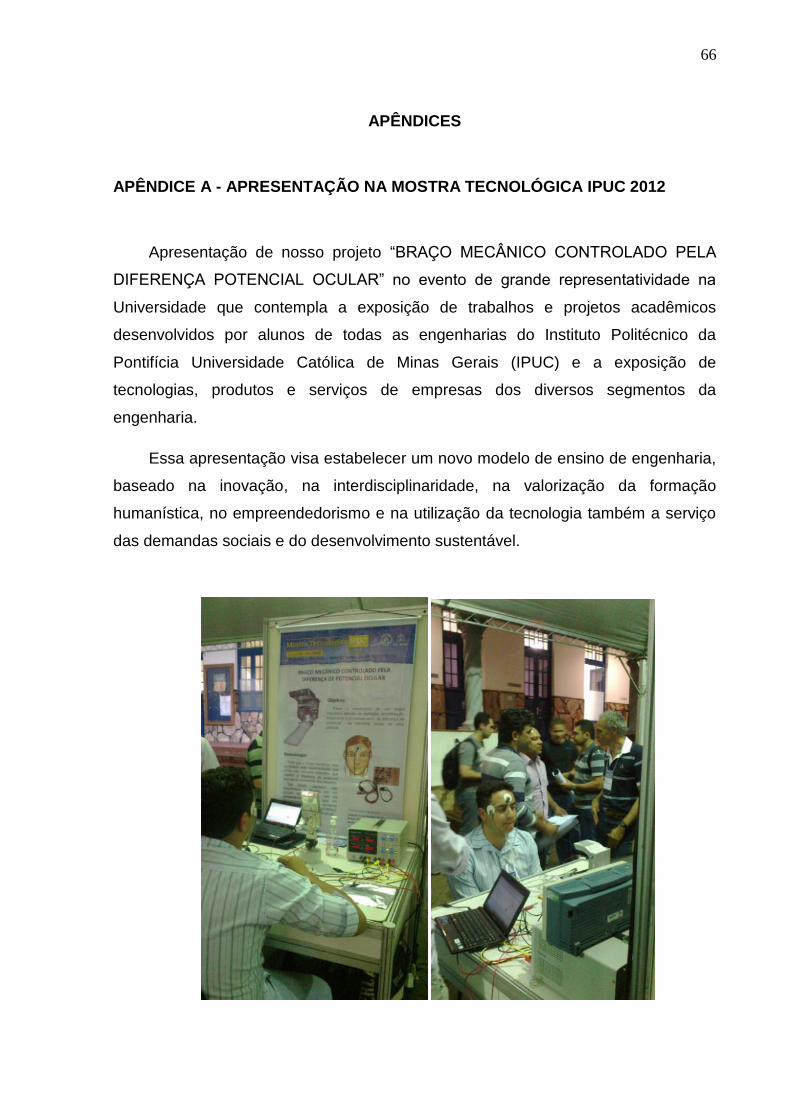
APÊNDICE A - APRESENTAÇÃO NA MOSTRA TECNOLÓGICA IPUC 2012
Apresentação de nosso projeto “BRAÇO MECÂNICO CONTROLADO PELA
DIFERENÇA POTENCIAL OCULAR” no evento de grande representatividade na
Universidade que contempla a exposição de trabalhos e projetos acadêmicos
desenvolvidos por alunos de todas as engenharias do Instituto Politécnico da
Pontifícia Universidade Católica de Minas Gerais (IPUC) e a exposição de
tecnologias, produtos e serviços de empresas dos diversos segmentos da
engenharia.
Essa apresentação visa estabelecer um novo modelo de ensino de engenharia,
baseado na inovação, na interdisciplinaridade, na valorização da formação
humanística, no empreendedorismo e na utilização da tecnologia também a serviço
das demandas sociais e do desenvolvimento sustentável.

67
68
APÊNDICE B – CÓDIGO FONTE DA PROGRAMAÇÃO DO PIC
/*PROJETO FINAL DE CURSO
PONTIFÍCIA UNIVERSIDADE CATÓLICA DE MINAS GERAIS
ENGENHARIA MECATRÔNICA - 2º/2012
BRAÇO MECÂNICO CONTROLADO PELA DIFERENÇA DE POTENCIAL OCULAR
ALUNOS: JACKSON JÚNIO PEREIRA TIRONI
RAFAEL DE ALMEIDA LIAL
SAULO VIEIRA FIDELIS E MOURA
ORIENTADOR: SADY ANTÔNIO DOS SANTOS FILHO*/
/** I N C L U D E S **********************************************************/
#include <p18cxxx.h>
#include <timers.h>
#include <pwm.h>
#include <delays.h>
/** V A R I A V E I S G L O B A I S ****************************************/
#define SINAL_HORIZONTAL PORTEbits.RE1
#define SINAL_VERTICAL PORTEbits.RE2
/*MOTOR HORIZONTAL: SAÍDA (RC1 = PINO 16 = CCP2), ENTRADA (RE1 = PINO 9)
MOTOR VERTICAL: SAÍDA (RC2 = PINO 17 = CCP1), ENTRADA (RE2 = PINO 10)*/
/* P R O T O T I P O S P R I V A D O S ***********************************/
void ConfiguraSistema(void);
void HighPriorityISRCode();
void LowPriorityISRCode();

69
/** F U N C O E S ************************************************************/
/******************************************************************************
* Funcao: void main(void)
* Entrada: Nenhuma (void)
* Saída: Nenhuma (void)
* Descrição: Função principal do programa.
*****************************************************************************/
void main(void)
int ATUAL, CONTADOR=0, ANTERIOR=0;
unsigned int dc=45, estado=1;
unsigned long int atraso170ms;
ConfiguraSistema(); // Configura as portas e periféricos do PIC.
OpenPWM1(413);
OpenPWM2(413);
SetDCPWM2(10);
while(1) // Laço infinito que executa o funcionamentoprincipal do projeto.
ATUAL=SINAL_HORIZONTAL;
if (ATUAL==1&&ANTERIOR==0)
if (CONTADOR%2==0)
70
estado=1;
PORTDbits.RD1 = 1;
PORTDbits.RD0 = 0;
else
estado=2;
PORTDbits.RD1 = 0;
PORTDbits.RD0 = 1;
CONTADOR=CONTADOR+1;
if (ATUAL==0&&ANTERIOR==1)
estado=0;
PORTDbits.RD1 = 0;
PORTDbits.RD0 = 0;
ANTERIOR=ATUAL;
if (estado==1)
if(dc<60)
dc++;

71
else
if(estado==2)
if(dc>30)
dc--;
SetDCPWM2(dc);
for(atraso170ms=50;atraso170ms;atraso170ms--);
// Delay10KTCYx(120);
// Delay10KTCYx(120);
;
//end main
/******************************************************************************
* Funcao: void ConfiguraSistema(void)
* Entrada: Nenhuma (void)
* Saída: Nenhuma (void)
* Descrição: InicializaSistema é a rotina de configuração principal do PIC.
* Seu objetivo é configurar as portas de I/O e os periféricos
* do microcontrolador para que os mesmos trabalhem da
maneira
* desejada no projeto.
*****************************************************************************/
void ConfiguraSistema(void)

72
TRISEbits.TRISE1 = 1;
TRISEbits.TRISE2 = 1;
TRISDbits.TRISD0 = 0;
TRISDbits.TRISD1 = 0;
// Configurando Pinos de I/O: Todas as portas digitais do PIC podem ser configuradas
// como entrada ou como saída. Esta escolha é feita dentro do registrador TRIS.
//
// Quando acessamos o registrador TRISD ou TRISC estamos configurando o funcio-
// namento de todas suas portas digitais, ou seja, todo PORTD e PORTC.
// Mas quando escrevemos TRISDbits ou TRISCbits, estamos configurando apenas
// uma das portas do conjunto de portas PORTD e PORTC.
//
// Para configurar uma porta como entrada atriui-se o valor "1" a seu registrador
// e para configura-la com saída basta atribuir o valor "0"(zero). Para memorizar
// facilmente lembre-se que o digito "1" parece com a letra "i" que lembra de
// Input(Entrada), já o digito "0"(zero) parece a letra "o" que lembra Output(saída).
//REDUZ O CLOCK DO PIC PARA 500KHZ
OSCCONbits.IRCF2 = 0;
OSCCONbits.IRCF1 = 1;
OSCCONbits.IRCF0 = 1;
OSCCONbits.SCS1 = 1;
OSCCONbits.SCS0 = 1;
//Config TIMER2

73
OpenTimer2( TIMER_INT_OFF &
T2_PS_1_16 &
T2_POST_1_16 );
// Configura LED's do KitPICMinas: saida digital
ADCON1 |= 0x0F; // configura todas as portas como digitais
// Configura Botões do KitPICMinas: entradas digitais
// TRISEbits.TRISE1=1; // RC1: entrada digital - BOTAO_1
//end ConfiguraSistema
/** V E C T O R R E M A P P I N G ******************************************/
// Rotina necessária para o compilador C18 saber onde é o início do vetor de
// "reset".
// Copiar na íntegra esta parte do código dentro do arquivo "main.c" de TODO
// projeto usado com o Bootloader no PIC.
extern void _startup (void); // See c018i.c in your C18 compiler dir
#pragma code REMAPPED_RESET_VECTOR = 0x1000
void _reset (void)
_asm goto _startup _endasm
/** EOF main.c ***************************************************************/
74
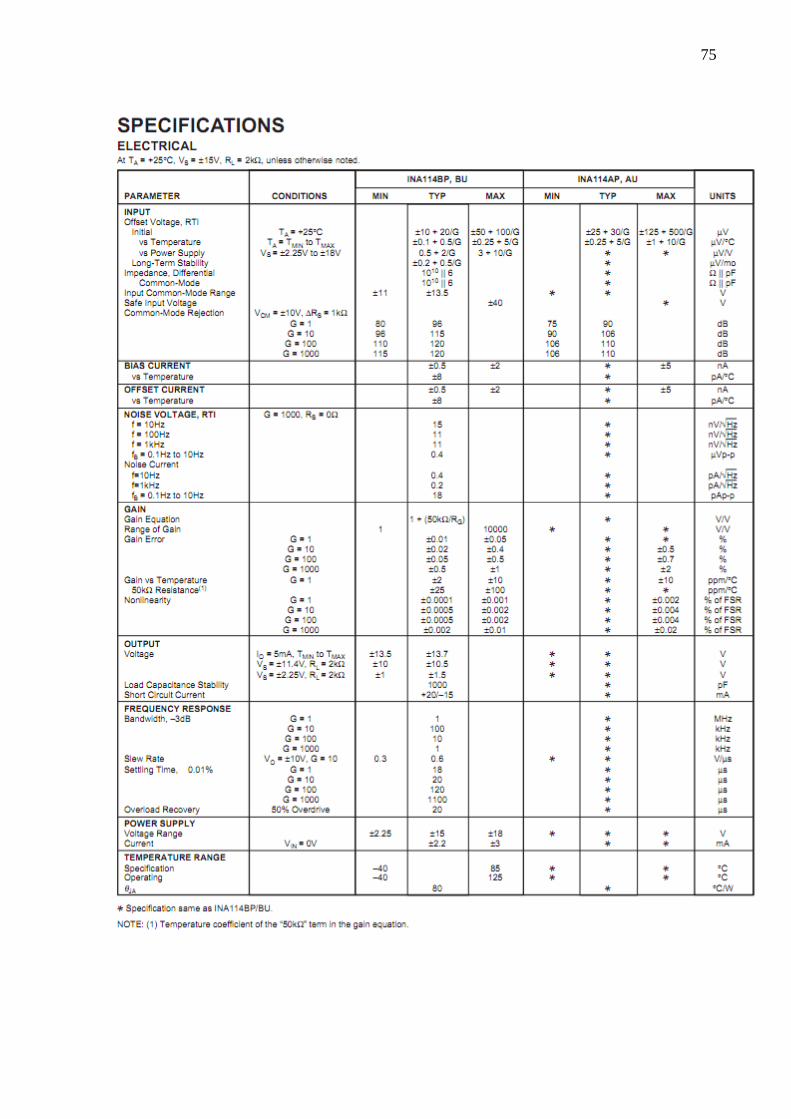
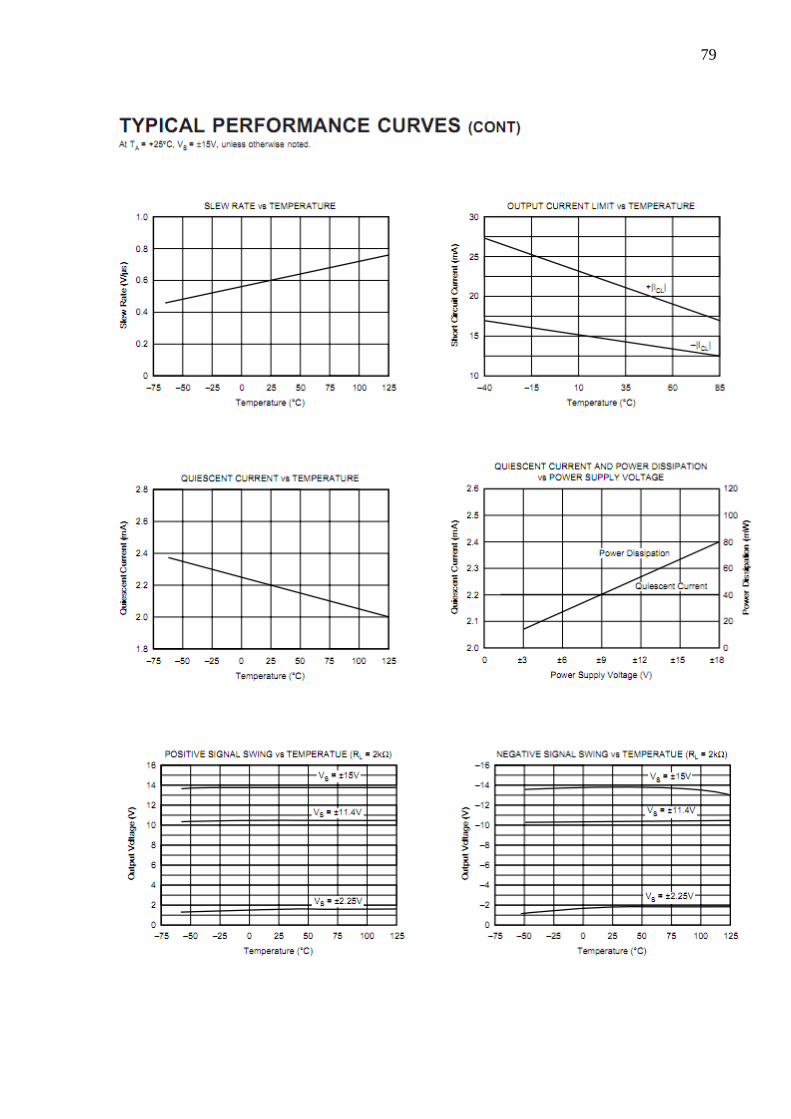
ANEXOS
ANEXO A - DATASHEET DO INA 114
75

76

77

78
79

80

81
82
83

84

85

86

87
88
ANEXO B – DATASHEET DO TL074

89
90
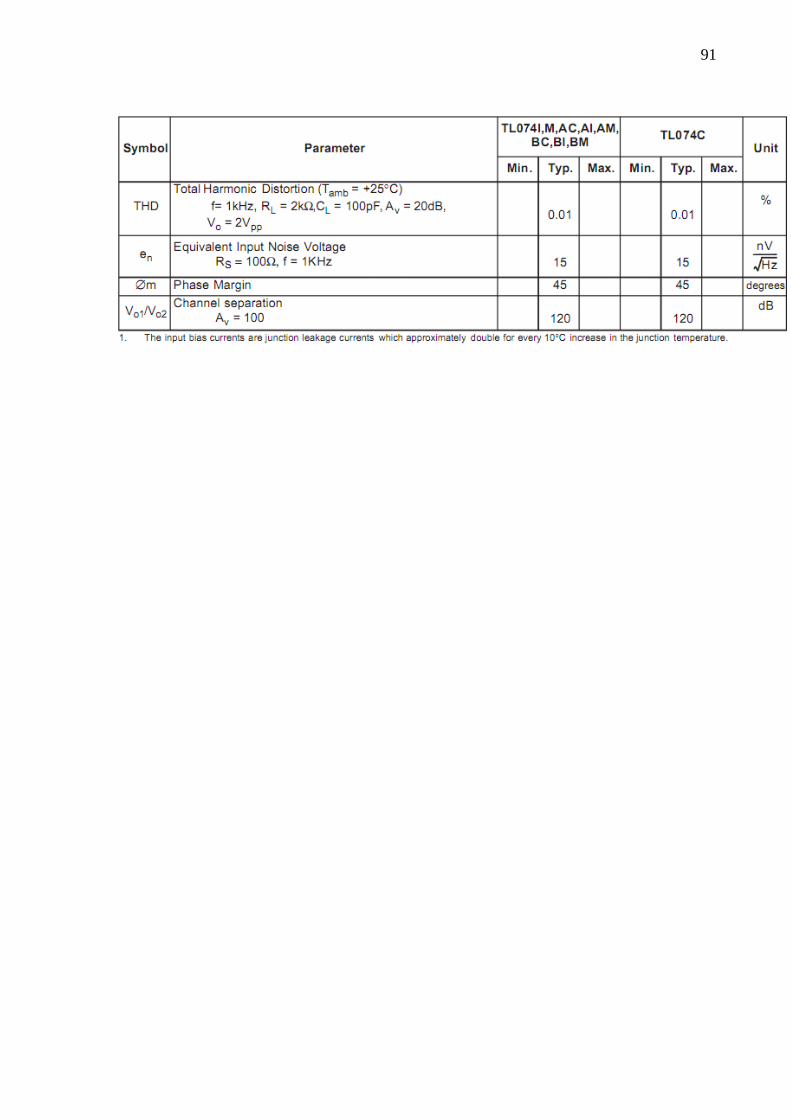
91
92
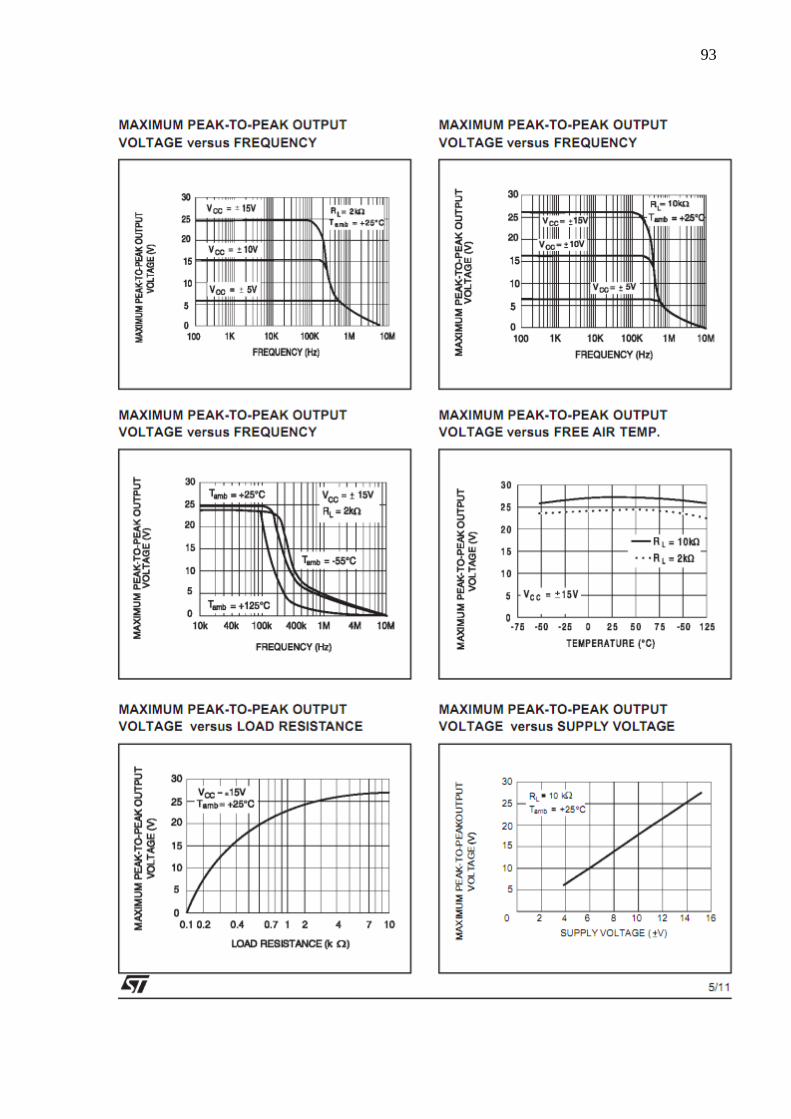
93

94
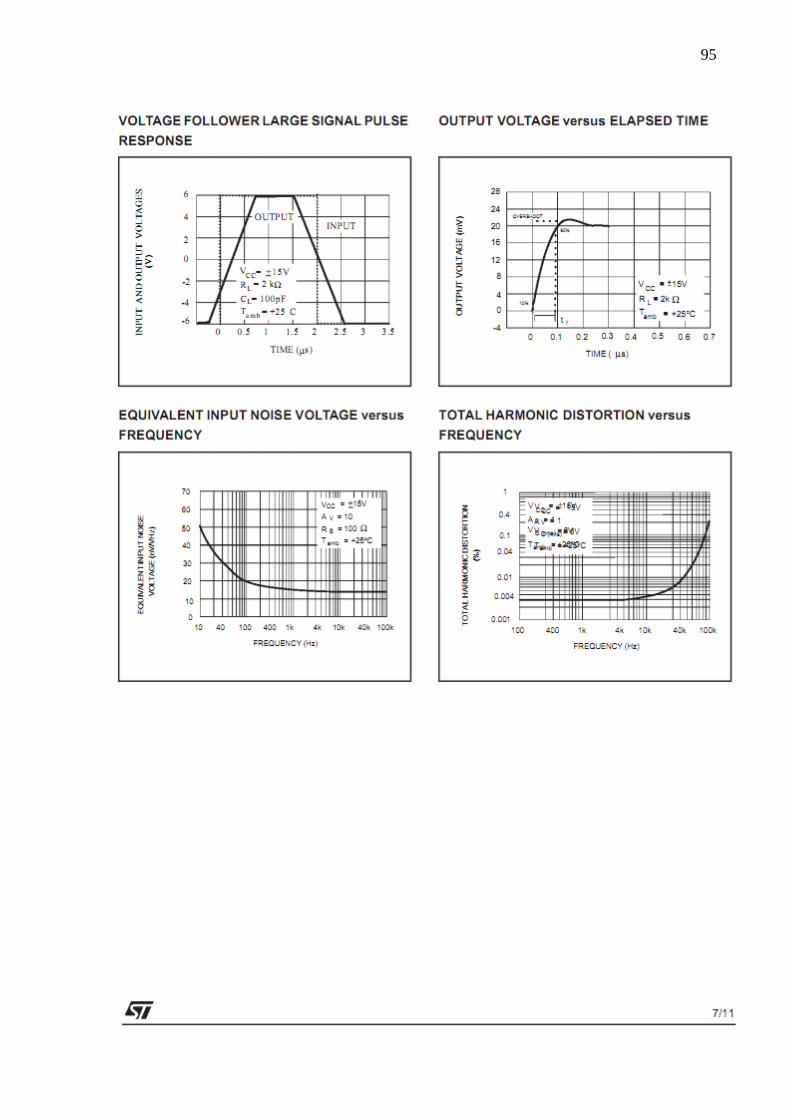
95

96

97

98
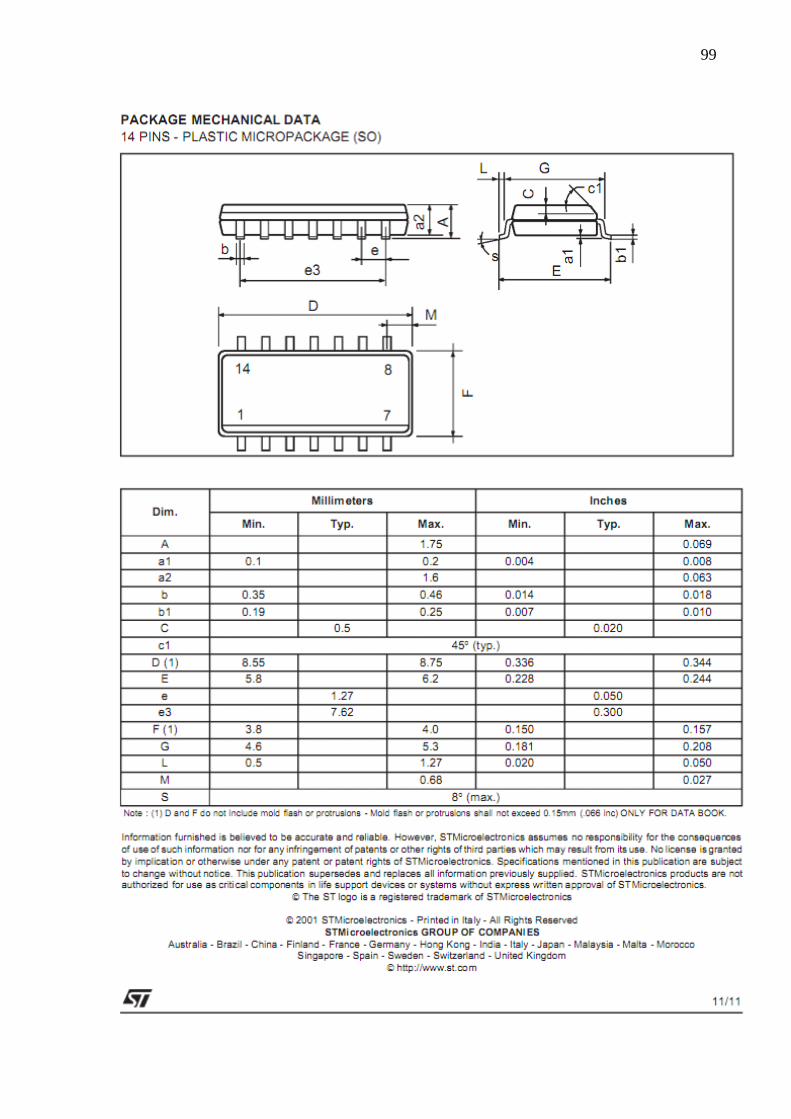
99