Biomecânica - Aula 4 estatica
47
BIOMECÂNICA Aula 2 Estática – condições de equilíbrio – parte 2 Prof. Dr. Felipe P Carpes Website de apoio http://sites.google.com/site/biomecunipampa
-
Upload
felipe-p-carpes-universidade-federal-do-pampa -
Category
Documents
-
view
1.229 -
download
2
Transcript of Biomecânica - Aula 4 estatica

BIOMECÂNICA
Aula 2
Estática – condições de equilíbrio – parte 2Prof. Dr. Felipe P Carpes
Website de apoiohttp://sites.google.com/site/biomecunipampa

Biomecânica - http://sites.google.com/site/biomecunipampa
AVISOS

Torque
Somatório de forças translacionais e rotacionais
Diagramas de corpo livre
Condições de equilíbrio estático
Biomecânica - http://sites.google.com/site/biomecunipampa
Tópicos

Conceituar torque
Calcular torques gerados em articulações
Determinar a resultante de um sistema de forças
Equilíbrio rotacional
Centro de gravidade
Biomecânica - http://sites.google.com/site/biomecunipampa
Objetivos

Biomecânica - http://sites.google.com/site/biomecunipampa
Retrospectiva
β α
vértice

Biomecânica - http://sites.google.com/site/biomecunipampa
Retrospectiva
β α
vértice

Biomecânica - http://sites.google.com/site/biomecunipampa
Retrospectiva
β α
vértice

Biomecânica - http://sites.google.com/site/biomecunipampa
Retrospectiva
β α
vértice

Biomecânica - http://sites.google.com/site/biomecunipampa
Retrospectiva
β α
vértice

Biomecânica - http://sites.google.com/site/biomecunipampa
Retrospectiva
β α
vértice

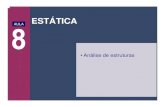
Fg
FhFacl
Fpcl
Fpt
FtfFacl – força tensiva do lcaFg – força exercida pelo GastrocnêmiosFh – força exercida pelos isquiotibiaisFpt – força tensiva do tendão patelarFpcl - força tensiva do lcpFtf – força compressiva devido ao contato tibiofemoral

Biomecânica - http://sites.google.com/site/biomecunipampa
Torque
Torque ou momento de força N.m
θsendFT ⋅⋅=
Força total aplicadaComponente rotatóriaComponente de compressão

Biomecânica - http://sites.google.com/site/biomecunipampa
Torque
Torque ou momento de força
Tendência de uma força para causar rotação sobre um eixo específico
⊥⋅= dFT
N.m

Biomecânica - http://sites.google.com/site/biomecunipampa
Torque

Biomecânica - http://sites.google.com/site/biomecunipampa
Torque
θsendFT ⋅⋅=

Biomecânica - http://sites.google.com/site/biomecunipampa
Torque
dFT ⋅=

Biomecânica - http://sites.google.com/site/biomecunipampa
Torque

Biomecânica - http://sites.google.com/site/biomecunipampa
Torque

Biomecânica - http://sites.google.com/site/biomecunipampa
Torque

Biomecânica - http://sites.google.com/site/biomecunipampa
Torque

Biomecânica - http://sites.google.com/site/biomecunipampa
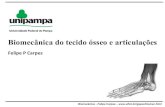
Torque muscular
Componentes rotatória e de compressão não são constantes ao longo do movimento.
No caso dos flexores do cotovelo, nos extremos da amplitude de movimento a componente rotatória apresenta menor
magnitude que a componente de compressão.

Biomecânica - http://sites.google.com/site/biomecunipampa
Torque

Biomecânica - http://sites.google.com/site/biomecunipampa
Torque

Biomecânica - http://sites.google.com/site/biomecunipampa
Condições de equilíbrio
1ª Condição: Não há translação
2ªCondição: Não há rotação
0=ΣF
0=ΣT
GARANTIA DE QUE O CORPO NÃO ESTÁ EM MOVIMENTO

Biomecânica - http://sites.google.com/site/biomecunipampa
Resultante de um sistema de forças
1ª condição de equilíbrio – o somatório das forças agindo sobre um ponto deve ser zero.

F3F1
F2
W
F1 = 100 NF2 = 212,13 NW = 50 NF3 = ?
Biomecânica - http://sites.google.com/site/biomecunipampa
Resultante de um sistema de forças

F3F1
F2 W
30º
45º
y
x
Biomecânica - http://sites.google.com/site/biomecunipampa
Resultante de um sistema de forças

F3
F1
F2
W
F1y
F1x
F2x
F2y
0=Σ xF
0=Σ yF
Biomecânica - http://sites.google.com/site/biomecunipampa
Resultante de um sistema de forças

F1x = F1.cos30 F1y = F1.sen30 = 100N.cos30 = 100N.sen30 = 86,6N = 50,0N
F2x = F2.cos45 F2y = F2.sen45 = 212,13N.cos45 = 212,13N.sen45 = 150N = 150N
0=Σ xF 0=Σ yF
Biomecânica - http://sites.google.com/site/biomecunipampa
Resultante de um sistema de forças

F1x = F1.cos30 F1y = F1.sen30 F1 + F2 + F3 + W = 0 = 100N.cos30 = 100N.sen30 = 86,6N = 50,0N
F2x = F2.cos45 F2y = F2.sen45 = 212,13N.cos45 = 212,13N.sen45 = 150N = 150N
0=Σ xF 0=Σ yF
Biomecânica - http://sites.google.com/site/biomecunipampa
Resultante de um sistema de forças

0=Σ xF 0=Σ yF
ΣFx = 0 F3x – F1x – F2x = 0
ΣFy = 0 F3y + F1y – F2y – W = 0
Biomecânica - http://sites.google.com/site/biomecunipampa
Resultante de um sistema de forças

0=Σ xF 0=Σ yF
ΣFx = 0 F3x – F1x – F2x = 0F3x – 86,6N – 150N = 0F3x = 236,6N
ΣFy = 0 F3y + F1y – F2y – P = 0F3y = - 50N + 150N + 50NF3y = 150N
Biomecânica - http://sites.google.com/site/biomecunipampa
Resultante de um sistema de forças

F3y
F3x
( ) ( ) 232
33 yx FFF +=
F3 = 280NTodas as forças estão atuando em um mesmo ponto com resultante nula (= 0)
Nessa situação, não haverá translação do sistema
Biomecânica - http://sites.google.com/site/biomecunipampa
Resultante de um sistema de forças
F3F1
F2
W

Biomecânica - http://sites.google.com/site/biomecunipampa
Condições de equilíbrio
Então:
Para garantir ausência de translação de um objeto, o somatório das forças agindo sobre ele deve ser igual a zero. Quando forças não ortogonais são experimentadas, o sistema deve ser analisado em relação ao plano cartesiano.
Assim, reduzimos as forças ao eixo X e o eixo Y para que seja feito o somatório para a direção X e direção Y

Biomecânica - http://sites.google.com/site/biomecunipampa
Condições de equilíbrio
Não há translação
Não há rotação?

Biomecânica - http://sites.google.com/site/biomecunipampa
Somatório de torques
2ª condição de equilíbrio – para que não exista rotação, o somatório dos torques agindo sobre um ponto deve ser zero.
Torque – efeito de uma força que age em um distância perpendicular ao eixo de rotação

Biomecânica - http://sites.google.com/site/biomecunipampa
Importante
Braüne e Fischer Dempster Clauser et al.
cabeça 7,1 8,1 7,3
tronco 46,6 49,7 50,7
braço 3,3 2,8 2,6
antebraço 2,1 1,6 1,6
mão 0,8 0,6 0,7
antebraço + mão 2,9 2,2 2,3
coxa 10,7 10,0 10,3
perna 4,8 4,6 4,3
pé 1,7 1,5 1,5
perna + pé 6,5 6,1 5,8
Peso relativo (%)

Biomecânica - http://sites.google.com/site/biomecunipampa
Importante
Raio proximal (%)Braüne e Fischer Dempster Clauser et al.
cabeça ----- 43,3 46,6
tronco ----- ----- 38,0
braço 47,0 43,6 51,3
antebraço 42,1 43,0 39,0
mão ----- 50,6 52,0
antebraço + mão 47,2 67,7 62,6
coxa 44,0 43,3 37,2
perna 42,0 43,3 37,1
pé 44,4 42,9 44,9
perna + pé 52,4 43,7 47,5

Biomecânica - http://sites.google.com/site/biomecunipampa
Importante
100% do comprimento
Raio proximal do antebraço é 43%

Biomecânica - http://sites.google.com/site/biomecunipampa
Importante
100% do comprimento
Raio proximal do antebraço é 43%

Biomecânica - http://sites.google.com/site/biomecunipampa
Somatório de torques
Quais torques existem na figura ao lado?

Biomecânica - http://sites.google.com/site/biomecunipampa
Somatório de torques
Considerando que o peso do antebraço seja correspondente a 22 N, qual é o torque gerado pelo bíceps braquial para manter uma postura de flexão do cotovelo em 90º?
Distância da inserção = 5 cmDistância do CM do antebraço = 14 cm

Biomecânica - http://sites.google.com/site/biomecunipampa
Somatório de torques
0=Σ sistemaT

Biomecânica - http://sites.google.com/site/biomecunipampa
Somatório de torques
P = 50 N, Ps = 20 N a = 5 cm, b = 15 cm, c = 30 cm
Qual o valor da F para esse sistema estar em equilíbrio?

Biomecânica - http://sites.google.com/site/biomecunipampa
Somatório de torques
P = 50 N, Ps = 20 N a = 5 cm, b = 15 cm, c = 30 cm

Biomecânica - http://sites.google.com/site/biomecunipampa
Equilíbrio estático
Somatório das forças = zerogarante ausência de translação
Somatório de torques = zerogarante ausência de rotação

Biomecânica - http://sites.google.com/site/biomecunipampa
HK = Hamill J; Knutzen KM. Bases biomecânicas do movimento humano. 2ª edição. Editora Manole, 2008OF = Okuno E; Fratin L. Desvendando a física do corpo humano. Biomecânica. Editora Manole, 2003.HA = Hall S. Biomecânica básica. 4ª edição. Guanabara Koogan, 2009.ENO = Enoka RM. Bases neuromecânicas da cinesiologia. 2ª edição. Manole, 2000.NF = Nordin M; Frankel VH. Biomecânica básica do sistema musculoesquelético. 3ªedição. Guanabara Koogan, 2008.WZ = Whiting WC; Zernicke RF. Biomecânica funcional e das lesões musculoesqueléticas. 2ª edição. Guanabara Koogan, 2009.
Referências básicas