aula_01.1
74
Curso de Instrumentista de Sistemas Fundamentos de Controle Prof Msc Jean Carlos
description
Fudamentos de Controle
Transcript of aula_01.1

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 1/74
Curso de Instrumentista de
Sistemas
Fundamentos de Controle
Prof Msc Jean Carlos

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 2/74
Fundamentos de Controle
Aula_01

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 3/74
Tópicos abordados
Definições em controle automáticoProcessoDefinições do controle automático de
processoVariáveis do processoAuto-regulação
Propriedades do processoResistência

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 4/74
Tópicos abordados
CapacitânciaTempo morto Tipos de distúrbios de processo
Distúrbios de alimentaçãoDistúrbios de demandaDistúrbios de set-point
Curvas de reação do processo

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 5/74
Introdução
rápido desenvolvimento do controleautomático; teorias de controle;
controladores microprocessados; computadores aplicados; ajuste e sintonia.

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 6/74
Introdução

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 7/74
Evolução Histórica
O primeiro controlador automáticoindustrial de que há notícia é oregulador centrífugo inventado em1775, por James Watts, para o controle
de velocidade das máquinas à vapor.
Turbina de Hero (aeolipile), primeiro dispositivo a vapor

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 8/74
Evolução Histórica
Esta invenção foi puramente empírica. Nada maisaconteceu no campo de controle até 1868,quando Clerk Maxwell, utilizando o cálculodiferencial, estabeleceu a primeira análisematemática do comportamento de um sistema
máquina-regulador.Por volta de 1900 aparecem outros reguladores e
servomecanismos aplicados à máquina a vapor,a turbinas e a alguns processos.
Durante a primeira guerra mundial, N. Minorskycria o servocontrole, também baseado narealimentação, para a manutenção automáticada rota dos navios e escreve um artigo intitulado“Directional Stability of Automatically Steered
Bodies”.

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 9/74
Evolução Histórica
O trabalho pioneiro de Norbert Wiener (1948)sobre fenômenos neurológicos e os sistemas decontrole no corpo humano abreviou o caminhopara o desenvolvimento de sistemas complexosde automação.
A partir daqui o progresso do controle automático foi muito rápido. Atualmente existe umaenorme variedade de equipamentos de medidasprimárias, transmissão das medidas(transmissores), de regulação (controlespneumáticos, elétricos e eletrônicos), de controle
final (válvulas pneumáticas, válvulas solenóide,servomotores etc.), de registro (registradores), deindicação (indicadores analógicos e digitais), decomputação (relés analógicos, relés digitais commicroprocessador), PLC’s, SDCD’s etc.

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 10/74
Evolução Histórica

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 11/74
Evolução Histórica
Estes equipamentos podem ser combinadosde modo a constituírem cadeias decontrole simples ou múltiplas,adaptadas aos inúmeros problemas de
controle e a um grande número de tiposde processos.Em 1932, H. Nyquist, da Bell Telephone,
cria a primeira teoria geral de controleautomático com sua “Regeneration Theory”, na qual se estabelece umcritério para o estudo da estabilidade.

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 12/74
CONCEITOS
O controle Automático tem como finalidade a manutenção de uma certavariável ou condição num certo valor (
fixo ou variante). Este valor que
pretendemos é o valor desejado.Para atingir esta finalidade o sistema de
controle automático opera do seguinte
modo:

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 13/74
Conceitos
Medida do valor atual da variável que se querregular.
Comparação do valor atual com o valor desejado (sendo este o último indicado ao sistema decontrole pelo operador humano ou por umcomputador). Determinação do desvio.
Utilização do desvio ( ou erro ) para gerar umsinal de correção.
D- Aplicação do sinal de correção ao sistema acontrolar de modo a ser eliminado o desvio, istoé , de maneira a reconduzir-se a variável aovalor desejado. O sinal de correção introduz poisvariações de sentido contrário ao erro.

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 14/74
Conceitos
Resumidamente podemos definirControle Automático como amanutenção do valor de uma certacondição através da sua média, da
determinação do desvio em relação aovalor desejado, e da utilização dodesvio para se gerar e aplicar um açãode controle capaz de reduzir ou
anular o desvio.

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 15/74
Exemplo
Controle de temperatura

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 16/74
Exemplo
De todas as grandezas relativas ao sistema(Nível, pressão, vazão, densidade, pH,energia fornecida, salinidade etc.) a
grandeza que nos interessa, neste caso,
regular é a temperatura da água. A temperatura é então a variávelcontrolada.
Um termômetro de bulbo permite medir o
valor atual da variável controlada. Asdilatações e contrações do fluido contidodentro do bulbo vão obrigar o“Bourdon” ( Tubo curvo de seção
elipsoidal) a enrolar ou desenrolar.

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 17/74
Exemplo
Os movimentos do extremo do bourdon traduzem a temperatura da água, aqual pode ser lida numa escala.
No diagrama representa-se um contatoelétrico no extremo do bourdon e outrocontato de posição ajustável à nossavontade. Este conjunto constitui um“Termostato”. Admitamos que se quermanter a temperatura da água nasproximidades de 50 C. Este valor da
temperatura da água é o valor desejado.

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 18/74
Exemplo
Se a temperatura, por qualquer motivo,ultrapassar o valor desejado, o contatodo termostato está aberto. A bobina docontator não está excitada e o contatormantém interrompida a alimentação da
resistência de aquecimento. Nãohavendo fornecimento de calor , a temperatura da água vai descer devidoàs perdas. A temperatura aproxima-sedo valor desejado. Quando, pelocontrário, a temperatura é inferior aovalor desejado o bourdon enrola e fechao contato do termostato. O contator fechae vai alimentar a resistência de
aquecimento.

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 19/74
Exemplo
Em conseqüência, a temperatura daágua no depósito vai subir de modo aaproximar-se de novo do valordesejado.
Normalmente as cadeias de controle sãomuito mais elaboradas. Neste exemplosimples encontramos contudo as
funções essenciais de uma malha decontrole.

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 20/74
Exemplo
Medida
-
A cargo do sistema termométrico.Comparação - Efetuada pelo sistema de
Contatos ( Posição Relativa)Computação -
Geração do sinal decorreção ( efetuada também pelo sistemade contatos e pelo resto do circuito
elétrico do termostato.Correção - Desempenhada pelo órgão deControle - Contator

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 21/74
Exemplo
Observa-se que , para a correção davariável controlada ( temperatura)deve-se atuar sobre outra variável (quantidade de calor fornecida ao
depósito). A ação de controle éaplicada, normalmente, a outravariável da qual depende a variávelcontrolada e que se designa com o
nome de variável manipulada. Nonosso exemplo, o “Sinal de Controle “ pode ser a corrente elétrica i.

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 22/74
Exemplo
Como veremos mais tarde, estamos diantede uma malha de controle do tipo ON-OFF. O sinal de controle apenas podeassumir dois valores. Na maior parte doscasos , como se verá, a função que
relaciona o sinal de controle com odesvio é muito mais elaborada. Podemosagora representar um diagramasimbólico das várias funções e variáveisencontradas (fig. abaixo). Alguns doselementos de medida e os elementos decomparação e de computação fazemnormalmente parte do instrumentochamado de “CONTROLADOR”

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 23/74
Definições
Planta - Uma planta é uma parte de umequipamento, eventualmente um conjunto deitens de uma máquina, que funcionaconjuntamente, cuja finalidade é desenvolveruma dada operação.
Processo - Qualquer operação ou seqüência deoperações, envolvendo uma mudança de estado,de composição, de dimensão ou outraspropriedades que possam ser definidasrelativamente a um padrão. Pode ser contínuo
ou em batelada.Sistemas - É uma combinação de componentes queatuam conjuntamente e realizam um certoobjetivo.
Variável do Processo (PV) - Qualquer quantidade,
propriedade ou condição físicamedida a fim de
D f

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 24/74
Definições
Variável Manipulada (MV) - É a grandeza que éoperada com a finalidade de manter a variávelcontrolada no valor desejado.
Set Point (SP) - É um valor desejado estabelecidopreviamente como referência de ponto de
controle no qual o valor controlado devepermanecer.Distúrbio (Ruído) - É um sinal que tende a afetar
adversamente o valor da variável controlada.Desvio - Representa o valor resultante da
diferença entre o valor desejado e o valor davariável controlada.Ganho - Representa o valor resultante do
quociente entre a taxa de mudança na saída e a taxa de mudança na entrada que a causou.
Ambas, a entrada e a saída devem ser expressas
D f

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 25/74
Definição
O termo atual controle automático deprocesso foi definido quando osprocedimentos do controle automático
foram aplicados para tornar mais
eficiente e seguro a manufatura deprodutos.
Ob

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 26/74
Objetivo
O principal objetivo do controleautomático de processo é conseguir queuma variável dinâmica se mantenhaconstante em um valor específico.
malha de controle fechada; Operação sem intervenção do elemento
humano;
medida e comparação continua dovalor atual da variável; Correção do erro.
V iá l t l d

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 27/74
Variável controlada
O termo processo significa as funçõese/ou operações usadas no tratamentode um material ou matéria-prima,
a operação de adicionar energiacalorífica à água é um processo.
A variável controlada ou a variável doprocesso é aquela que mais
diretamente indica a forma ou estadodesejado do produto.
E l

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 28/74
Exemplo
o sistema de aquecimento de água. A finalidade do sistema é fornecer uma
determinada vazão de água aquecida. A variável mais indicativa desse objetivo
é a temperatura da água de saída doaquecedor, que deve ser então a variávelcontrolada.
C t l di t /i di t

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 29/74
Controle direto/indireto
No exemplo anterior, é realizado umcontrole direto sobre a qualidade doproduto, que é a maneira mais eficazde garantir que essa qualidade se
mantenha dentro dos padrõesdesejados. Um controle indireto sobre uma
variável secundária do processo podeser necessário quando o controle direto
for difícil de se implementar.
C t l di t /i di t

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 30/74
Controle direto/indireto
Por exemplo, num forno derecozimento, que é projetado pararecozer convenientemente peçasmetálicas, a variável controlada
deveria ser a condição de recozimentodo material. Entretanto, é muitodifícil de se obter esta medida comsimples instrumentos, e normalmente
a temperatura do forno é tomada comovariável controlada.
C t l di t /i di t

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 31/74
Controle direto/indireto
Geralmente o controle indireto émenos eficaz que o controle direto,porque nem sempre existe uma relaçãodefinida e invariável entre a variável
secundária e a qualidade do produtoque se deseja controlar.
Variável manipulda

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 32/74
Variável manipulda
A variável manipulada do processo éaquela sobre a qual o controladorautomático atua, no sentido de semanter a variável controlada no valor
desejado. A variável manipulada pode ser
qualquer variável do processo quecausa uma variação rápida navariável controlada e que seja fácil dese manipular.
Variáveis de carga

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 33/74
Variáveis de carga
Para o trocador do exemplo, a variávelmanipulada pelo controlador deveráser a vazão de vapor.
É possível, mas não prático,
manipular a vazão da água deentrada ou a sua temperatura.
As variáveis de carga ou secundárias
do processo são todas as outrasvariáveis independentes, com exceçãodas variáveis manipulada econtrolada.
Exemplo de variável de carga

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 34/74
Exemplo de variável de carga
Para o trocador do exemplo, a temperatura da água de entrada éuma variável de carga.
O controlador automático deverá
absorver as flutuações das variáveis decarga para manter a variávelcontrolada no seu valor desejado.
Trocadores de energia

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 35/74
Trocadores de energia
O aquecedor de água do exemploanterior, como muitos processos podemser considerados um trocador deenergia.
Em muitos outros processos, a troca demateriais apenas, ou a troca demateriais e energia, pode serenvolvida.
a energia é introduzida no processo,passa por uma série de trocas e saicomo energia de saída.
Trocadores de energia

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 36/74
Trocadores de energia
A quantidade de energia de saída éigual à quantidade de energia deentrada, menos as perdas e a energiaarmazenada no processo.
No trocador de calor, a quantidade deenergia de saída depende da vazão devapor regulada pela válvula, da
temperatura, da água fria e das perdasde energia calorífica, como porexemplo através das paredes do
tanque.
Autoregulação

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 37/74
Autoregulação
Certos processos possuem umacaracterística própria que ajuda alimitar o desvio da variávelcontrolada.
Na nosso exemplo, quando a entradade vapor aumenta, a temperatura daágua atinge um ponto de equilíbrio aum valor mais alto, isto é, a
temperatura da água não iráaumentar indefinidamente.
Autoregulação

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 38/74
Autoregulação
O processo que tem a condição debalancear a sua energia de saída coma energia de entrada é chamado deprocesso estável.
Outro exemplo

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 39/74
Outro exemplo
No processo da próxima figura a vazãode saída através da resistência “R” tende a se igualar à vazão através daválvula “A”.
Se a válvula “A” for mais aberta oumais fechada, o nível do tanque iráaumentar ou diminuir até que avazão de saída através de “R” sejaigual à nova vazão de entrada.
processo estável ou auto-l d

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 40/74
regulado
Então, através de amplos limites, oprocesso irá estabilizar e sua vazão desaída será igual a sua vazão deentrada.
O limite deste exemplo depende daprofundidade do tanque. Este tipo de processo é chamado de
processo estável ou auto-regulado.
Exemplo

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 41/74
Exemplo
Processos estáveis/instáveis

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 42/74
Processos estáveis/instáveis
De acordo com o nosso exemplo,podemos distinguir os processos estáveisdos processos instáveis tambémconhecidos como processos não auto-
regulados. No processo instável a vazão de saída é
mantida constante por uma bomba dedeslocamento positivo e velocidadeconstante.
Processos estáveis/instáveis

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 43/74
Processos estáveis/instáveis
A não ser que a vazão de entrada sejaexatamente igual à vazão de saída, o tanque irá esvaziar completamente ou transbordar.
Não existe tendência deste processo aequilibrar sua saída com sua entrada. O processo estável facilita as aplicações
do controle automático, já o processoinstável irá torná-las difíceis, ou talvez impossíveis.
Processo instável

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 44/74
Processo instável
O processo instável pode ser definidocomo o processo que tem tendência a sedesequilibrar permanentemente.
atrasos de tempo do processo

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 45/74
p p
processos têm a característica deatrasar as mudanças nos valores dasvariáveis do processo.
Estas características dos processos
aumentam demais as dificuldades docontrole. Estes retardos são geralmente
chamados atrasos de tempo do processo. três propriedades que são: Resistência,
Capacitância e Tempo Morto.

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 46/74
Resistência: São as partes do processo que resistem auma transferência de energia ou dematerial.
Capacitânica: é uma mudança na quantidade contida,
por unidade mudada na variável dereferência.
Capacitância

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 47/74
p
Capacitância

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 48/74
p
A capacitância representa a relaçãoentre a variação de volume e avariação de altura do material do
tanque.
observe que embora os tanques tenhama mesma capacidade, apresentamcapacitâncias diferentes.
Uma capacitância relativamente grande é favorável para manterconstante a variável controlada apesardas mudanças de carga.
Capacidade/capacitância

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 49/74
p / p
porém esta característica faz com queseja mais difícil mudar a variávelpara um novo valor, introduzindo umatraso importante entre uma variação
do fluído controlado e o novo valorque toma a variável controlada. a capacitância é uma característica
dinâmica do processo e a capacidade é
uma característica volumétrica doprocesso.
Tempo morto

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 50/74
p
Como o nome diz, o tempo morto é acaracterística de um sistema pela quala resposta a uma excitação é retardadano tempo, ou seja, é o intervalo após a
aplicação da excitação durante o qualnenhuma resposta é observada. Esta característica não depende da
natureza da excitação aplicada e
aparece sempre da mesma forma. Sua dimensão é simplesmente a de tempo.
Tempo morto

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 51/74
p
O tempo morto ocorre no transporte demassa ou energia, através de um dadopercurso. O comprimento do percurso ea velocidade de propagação definem o
tempo morto. O tempo morto também édenominado de atraso puro, atraso de transporte ou atraso distância xvelocidade
Exemplo

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 52/74
Um exemplo de processo que consistebasicamente de tempo morto é osistema de controle de peso de sólidossobre uma correia transportadora.
O tempo morto entre a ação da válvulae a variação resultante no peso, é igualà distância entre a válvula e a céluladetectora de peso dividida pela
velocidade de transporte da correia.
Exemplo

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 53/74
Assim...

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 54/74
A resposta de um sistema que possuisomente tempo morto a qualquer sinalaplicado à sua entrada será sempre osinal defasado de uma certa
quantidade de tempo.
Tipos de distúrbios de processo

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 55/74
Na análise de um processo do ponto devista do controle automático é bomdar-se particular consideração a trêsdos vários tipos de distúrbios de
processo que podem ocorrer. Distúrbios de alimentação, demanda e
set-point
Distúrbios de alimentação

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 56/74
É uma mudança de energia oumaterial na entrada do processo. No
trocador de calor, processo anterior,mudanças na temperatura do vapor,
na entrada de água fria ou naabertura da válvula, são distúrbios dealimentação.
Distúrbios de demanda

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 57/74
É uma mudança de energia oumaterial na saída do processo. Noexemplo do trocador de Calor amudança da vazão de água fria
devido a um aumento da vazão deágua aquecida é um distúrbio dedemanda.
Distúrbios de set-point

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 58/74
É uma mudança no ponto de trabalhodo processo. As mudanças de set-point
geralmente são difíceis por váriasrazões:
elas são geralmente aplicadas muitorepentinamente. elas são geralmente mudanças na
alimentação, e por isso devem atravessar o
processo inteiro para serem medidas econtroladas.
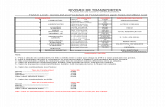
Curvas de reação do processo

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 59/74
Podem ser aprendidas muitas coisassobre as características de um processopara determinar sua controlabilidadepelo estudo das reações das variáveis
do processo, provocadas por mudançasde cargas em condições de nãocontrole.
Na discussão que se segue, o processo
representado pelo trocador de calor,pode ser suposto estar em condiçãoestável.
Curvas de reação do processo

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 60/74
A partir disso são mostradas as curvasde reação para várias combinações deRC e tempo morto. curva “a” - efeito de uma mudança
brusca de carga de demanda feita no tempo zero, aumentando a abertura daválvula de água fria.
A curva “b” - efeito de uma mudança
brusca de carga de alimentação feita no tempo zero e representa o aumento dealimentação de vapor suficiente paracorrigir o distúrbio de demanda
Resposta ideal

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 61/74
curvas de reação em condições de nãocontrole do trocador de calor
Resposta ideal

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 62/74
A curva “c” mostra o efeito da aplicaçãosimultânea da mudança de carga dedemanda e de sua exata correção dealimentação.
teoricamente possível pela abertura
simultânea das válvulas de água quente ede vapor da mesma maneira que foirealizado na obtenção das curvas “a” “b”.
curva “c”, quando a correção for
aplicada simultaneamente com odistúrbio de demanda, consegue-se evitarcompletamente a mudança de
temperatura.
Outros conceitos

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 63/74
Controlar uma planta ou processo significa dominar ou governar aplanta através da aplicação de uma entrada (“excitação, input ou MV”),de maneira a obter uma saída (“resposta, output ouPV”) tão próximo quanto possível de uma saída desejada(“referência ou SP”) previamente especificada.

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 64/74
Principais objetivos do controle de processos:
Segurança pessoal e operacional
Adaptação a perturbações externas
Estabilidade operacional
Especificação do produto
Redução do impacto ambiental
Adaptação às restrições inerentes
ao processo (equipamentos, materiais etc.)
Otimização
Resultado econômico do processo

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 65/74
1.2 – Classificação da Teoria de Controle
1.2.1 – Quanto à abordagem da Teoria de Controle: ControleConvencional e Controle Avançado

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 66/74
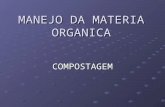
1.2.2 – Quanto ao modo de implementação
1.2.2.1 – Controle Analógico:
:
Capítulo 1: Conceitos Básicos

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 67/74
1.2.2.2 – Controle Digital

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 68/74
1.3 - Definições Preliminares (de acordo com a norma IEEE)
1.3.1 – Sistema: É um conjunto de componentesque agem no desempenho de uma funçãoque seria impossível para qualquer umadas partes isoladamente. A palavra incluientidades físicas, biológicas,organizacionais etc.
1.3.2 – Planta: É um sistema físico.
É o objeto da Teoria de Controle.

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 69/74
Sistema de Controle a Malha Aberta: É o Sistema deControle em que a saída da planta não tem efeito sobre o sinal
de controle. Sinal de controle (ou Variável Manipulada –
MV) é um sinal de natureza física que provem docontrolador e, direta ou indiretamente, alimenta ofuncionamento da planta.
Disparada a flecha, não setem mais ação de controlesobre a mesma...

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 70/74
Sistema de Controle a Malha Fechada: É um Sistema deControle em que a saída da planta tem efeito sobre o sinal decontrole, de modo a fazer com que a mesma seja igual a saídadesejada. A saída corrente da planta é chamada de Variável do
Processo – PV) e a saída desejada (ou valor de referência) échamada de “Setpoint”- SP).
O ato de pegar um copo éconsiderado um Sistema aMalha Fechada. E se apessoa estivesse com os
olhos vendados ???
M d l M t áti É t ã t áti d l

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 71/74
Modelo Matemático:É a representação matemática de algumcomportamento do sistema físico em observação. Os modelospodem ser paramétricos (Ex.: equações matemáticas) ou não-
paramétricos (Ex.: gráficos).
Resposta de uma Planta: A resposta completa de uma plantaé composta de 2(duas) partes – Resposta Transitória eResposta Permanente.
Resposta Transitória (“Transient Response”):
Corresponde ao comporta-mento inicial do sinal de
saída da planta, até omesmo atingir aestabilidade.

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 72/74
Resposta Permanente (“Steady-State Response”)
Corresponde à parte do sinalde saída da planta quepermanece após o
desaparecimento da respostatransitória, caso o sistema sejaestável.
Sistemas Invariantes e Variantes no Tempo: Um sistema

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 73/74
Sistemas Invariantes e Variantes no Tempo: Um sistemaé classificado de invariante no tempo quando os seusparâmetros físicos (massa, resistência, etc) não variam como passar do tempo. Isso quer dizer que a sua saída (“output”) independe do instante em que a entrada (“input”) é aplicada.
Os comportamentosnos intervalos t1-t2e t3-t4 são idênticos.
Do modo contrário, um sistema é dito variante no tempoquando um de seus parâmetros físicos sofrer alteraçãocom o passar do tempo.

7/21/2019 aula_01.1
http://slidepdf.com/reader/full/aula011-56d8d5a0ccb5d 74/74