Aula 6, 7, 8 e 9 - Calculo Estequiométrico - Extensivo Noite - 2015
Upload
clerton-maiaCategory
view
217download
0
8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 1/28
FACULDADE FARIAS BRITOCursos: Bacharelado em Engenharia Ambiental e Sanitária;
Bacharelado em Engenharia CivilDisciplina: Topografia e Altimetria
Professora: Dra. Tatiana Falcão

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 2/28
CONTEÚDO
3. Sistema de Posicionamento Global (GPS) – 5h
3.1. Conceito e objetivo;3.2. Tipos de segmentos;
3.3. Importância e aplicações;
3.4. Métodos de posicionamento;
3.5. Equipamentos e precisão;
3.6. Tipos de erros;
3.7. Atividades práticas.

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 3/28
Compreender o conceito de Sistema de Posicionamento Global
(GPS);Conhecer os tipos de segmentos do Sistema Global de Navegação
por Satélites;
Conhecer suas aplicabilidades;
Saber os tipos de métodos e erros.
Objetivos da Aula

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 4/28
DEFINIÇÃO E OBJETIVO
O Sistema de Posicionamento Global conhecido por NAVSTAR GPS
(Navigation Satellite With Timing and Ranging / Global Positioning
System) é um sofisticado sistema eletrônico de radionavegação,
baseado em uma rede de satélites que permite a qualquer usuário
obter informações referentes a sua localização, velocidade e tempo,
em qualquer ponto da terra, vinte e quatro horas por dia, emquaisquer condições de clima.
Obs.: GPS, GLONASS, COMPASS E GALILEO > Chamados de GNSS (Sistema Global de
Navegação por Satélites)
Sistema de Posicionamento Global - GPS

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 5/28
GPS GLONASS GALILEO COMPASS
Estados Unidos Antiga URSS União Europeia Chinês
24 satélites* 24 satélites* 27 satélites* 35 satélites*
06 órbitas 03 órbitas 03 órbitas -
11h 58min 11h 15min 14h 4min 42s -
* Verificar situação atual.Objetivo: posição, velocidade e tempo.
http://glonass-iac.ru/en/GLONASS/
http://www.youtube.com/watch?v=_Re2t8Ehs78
Sistema de Posicionamento Global - GPS

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 6/28
“Tecnologia extremamente útil e inovadora para uma série de atividades que
necessita de posicionamento” (MONICO, 2008).
“Sistema pode tornar-se a maior ferramenta de levantamento geodésico já
desenvolvida” (MCCOMARC, 2007) .
“O que diferencia os levantamentos geodésicos dos levantamentos
topográficos é o PLANO DE REFERÊNCIA. A topografia usa a superfície plana
como referencial enquanto a Geodésia utiliza o elipsoide de revolução”
(SANTOS, 2011).
Sistema de Posicionamento Global - GPS

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 7/28
SEGMENTOS
O sistema NAVSTAR GPS subdividi-se em três segmentos: espacial,controle e usuário.
Sistema de Posicionamento Global - GPS

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 8/28
SEGMENTO ESPACIAL
Foi concebida de forma que existam no mínimo 04 satélitesvisíveis acima do horizonte em qualquer ponto da superfície e
qualquer altura e hora do dia.
INTERESSANTE:
http://www.ibge.gov.br/ibgeteen/atlasescolar/apresentacoes/tecnicas.swf
Sistema de Posicionamento Global - GPS

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 9/28
SEGMENTO DE CONTROLE
Constituído por 05 estações de monitoramento mundial que estão localizadas nosseguintes locais: Havai (EUA), Atol Kwajalein (Oceano Pacífico Norte), Ilha da Ascensão(Oceano Atlântico Sul), Ilha de Diego Garcia (Oceano Indico Sul) e Colorado Spring (EUA).
Sistema de Posicionamento Global - GPS

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 10/28
SEGMENTO DE CONTROLE
Tem como objetivo:
Monitorar e controlar continuamente o sistema de satélites;
Determinar o tempo GPS;
Calcular as correções dos relógios dos satélites;
Predizer as efemérides (dados/informações) dos satélites;
Atualizar periodicamente as mensagens de navegação de cadasatélite;
Atestar a saúde dos satélites validando suas mensagens;
E comandar as manobras de reposicionamento dos satélitesperiodicamente em suas próprias órbitas.
Sistema de Posicionamento Global - GPS

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 11/28
SEGMENTO USUÁRIO
Inclui todos aqueles que usam um receptor GPS para receber e convertero sinal de GPS em posição, velocidade e tempo.
Inclui ainda todos elementos necessários neste processo como antes esoftware de processamento.
Usuários civis e militares.
Sistema de Posicionamento Global - GPS

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 12/28
USOS DO GPS (Civil / Militar)
Localização (latitude e longitudeou norte e leste) .
Sistema de Posicionamento Global - GPS

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 13/28
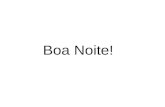
GEOREFERENCIAMENTO:
F o n t e
d a i m a g e m : i n t e r n e t .
Sistema de Posicionamento Global - GPS

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 14/28
USO MILITAR
Sistema de Posicionamento Global - GPS

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 15/28
TEORIA BÁSICA
DISTÂNCIA ESPACIAL >>> A medição de distância de uma posição daTerra para um satélite artificial;
Distâncias >>> Tempo >>> 299.792.458 metros por segundos
(velocidade da luz no vácuo)
Sinais de satélites são retardados por interferências de partículascarregadas da ionosfera.
ERRAMOS >>> 0,1 segundo >>> 29.979 km
RECEPTORES >>> nanosegundos >>> 0,3 m
Sistema de Posicionamento Global - GPS

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 16/28
MÉTODO DE POSICIONAMENTO
É a posição de objetos com relação a um referencial específico. O
posicionamento necessita de uma recepção simultânea de pelo
menos quatro satélites, de cujos sinais e mensagens se pode obter
parâmetros e equações que permitem resolver as incógnitas x, y, z e
t, ou seja, as três coordenadas espaciais (local da antena do usuário) e
mais o tempo (ou instante do sinal recebido). Os métodos de
posicionamento com GPS podem ser divididos em duas variantes:
Absoluto;
Relativo.
Sistema de Posicionamento Global - GPS
S G G S

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 17/28
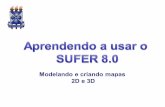
Posicionamento por ponto ou absoluto e o posicionamento
diferencial ou relativo (MCCORMAC, 2007).
Fonte: http://mundogeo.com/blog/2005/09/29/gnss-na-navegacao-maritima/.
RELATIVOABSOLUTO
Sistema de Posicionamento Global - GPS
Si t d P i i t Gl b l GPS

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 18/28
Sistema de Posicionamento Global - GPS
Si t d P i i t Gl b l GPS

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 19/28
Sistema de Posicionamento Global - GPS
Si t d P i i t Gl b l GPS

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 20/28
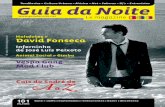
Linha de Base Tempo de Observação Equipamento Utilizado Precisão
00-05 Km 05-10 min L1 ou L1/L2 5 - 10 mm + 1 ppm
05-10 km 10-15 min L1 ou L1/L2 5 - 10 mm + 1 ppm
10-20 km 10-30 min L1 ou L1/L2 5 - 10 mm + 1 ppm
20-50 km 02-03 horas L1/L2 5 mm + 1 ppm50-100 km Mínimo 03 hr L1/L2 5 mm + 1 ppm
> 100 km Mínimo 04 hr L1/L2 5 mm + 1 ppm
Linha de Base Ocupação
Mínima
Observáveis Tipo de
Solução
N° de
Sessões
Efemérides
0-10 Km 20 min φL1 ou L1/L2 Fixa 1 Transmitidas ou Precisas
10-20 km 30 min L1 ou L1/L2 Fixa 1 Transmitidas ou Precisas
10-20 km 60 min φL1 Fixa 1 Transmitidas ou Precisas
20-100 km 120 min φL1/L2 Fixa/Flutuante 2 Transmitidas ou Precisas
100-500 km 240 min φL1/L2 Fixa/Flutuante 2 Precisas
500-1000 km 480 min φL1/L2 Fixa/Flutuante 3 Precisas
Fonte: IBGE
Fonte: INCRA
CARACTERÍSTICAS DAS SESSÕES DE RASTREIO PARAPOSICIONAMENTO RELATIVO
Sistema de Posicionamento Global - GPS
Si t d P i i t Gl b l GPS

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 21/28
ERROS GPS
Condições atmosféricas, imperfeições dos equipamentos e outros.
Erros de refração atmosférica;
Erros de multicaminhamento;
Erros dos satélites;
Erros do receptores;
Erros de instalação (prumos ópticos);
Disponibilidade seletiva.
Sistema de Posicionamento Global - GPS
Si t d P i i t Gl b l GPS

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 22/28
Sistema de Posicionamento Global - GPS
Projeção Universal Transversa
de Mercator – UTM
Fuso/Zona: 24MSIRGAS 2000
M.C. 39° W
Imagem: Quick Bird 2012
Fonte da imagem: Google Earth
Si t d P i i t Gl b l GPS

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 23/28
Sistema de Posicionamento Global - GPS
Sistema de Posicionamento Global GPS

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 24/28
Sistema de Posicionamento Global - GPS
Sistema de Posicionamento Global GPS

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 25/28
Sistema de Posicionamento Global - GPS
Sistema de Posicionamento Global GPS

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 26/28
Sistema de Posicionamento Global - GPS
Sistema de Posicionamento Global GPS

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 27/28
Sistema de Posicionamento Global - GPS
Sistema de Posicionamento Global GPS

8/15/2019 Aula 8 Noite
http://slidepdf.com/reader/full/aula-8-noite 28/28
SUGESTÕES DE LEITURAS:
Sistema de Posicionamento Global - GPS