Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
33
Controle de Sistemas Mecânicos Avanço ou atraso analítico Avanço ou atraso analítico Método baseado na resposta em freqüência Método baseado no lugar das raízes
Transcript of Apostila Controle - 22 - Projeto Avanço / Atraso Analítico

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 1/33
Controle de Sistemas Mecânicos
Avanço ou atraso analítico Avanço ou atraso analítico
Método baseado na resposta em freqüênciaMétodo baseado no lugar das raízes

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 2/33
Controle de Sistemas Mecânicos
Método analíticoMétodo analítico
Há dois métodos analíticos
• Com base na resposta em freqüência, onde a referênciapara o projeto do controlador é a margem de fase desejada
• Com base no lugar das raízes, onde a referência para oprojeto do controlador é um par de pólos complexos
desejadoPara o primeiro caso:
• Na freqüência de cruzamento de ganho futura têm-se amargem de fase desejada, portanto amplitude de 0 dB e
margem de fase φmf
Para o segundo caso:• No pólo desejado corresponde ao ponto –1 , portanto têm-
se amplitude de 0 dB com fase -180 °

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 3/33
Controle de Sistemas Mecânicos
Base metodológicaBase metodológica
O ganho de malha, incluindo o controlador e a planta, é
dado por
Para uma dada freqüência ω D sobre o eixo imaginário, pode-se escrever para a planta
que corresponde à resposta em freqüência
11
)()()()(+
+==
TsTs
K s P s K s P s L cα
P j
P D em j P θ
ω =)(

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 4/33
Controle de Sistemas Mecânicos
ContinuandoContinuando
Para a mesma freqüência ω D, pode-se escrever para o
controlador
Considerando ω D =ω cg a freqüência de cruzamento de ganho
e portanto
( ) ( ) ( ) s P s K s=
)()(1 K P K P j K P
j K
j P mf emmemem θ θ θ θ φ π +==+−
K j K
cg
cg ccg em
Tj
Tj K j K θ
ω
ω α ω =
+
+=
1
1)(
K p j j K p
cg
cg ccg cg eemm
Tj
Tj K j P j L θ θ
ω
ω α ω ω =
+
+=
1
1)()(

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 5/33
Controle de Sistemas Mecânicos
FormulaçãoFormulação
Chega-se assim às duas fórmulas básicas para
a amplitude e a fase do controlador
ou ainda,
1k p
k p mf
m m
θ θ π φ
=
+ = − +
1k p
k mf p
mm
θ π φ θ
=
= − + −

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 6/33
Controle de Sistemas Mecânicos
ConcluindoConcluindo
)(cos11)( K K K
j K
cg
cg ccg jsinmem
TjTj K j K K θ θ
ω ω α ω θ +==
++=
Uma vez encontrada a amplitude e a fase
necessárias ao controlador para atender àespecificação da margem de fase, pode-seescrever,
e finalmente
K K cg
cg c
K K cg
cg c
sinmT
T K
mT
T K
θ ω
α ω
θ ω
ω α
=+
−
=+
+
1
)1(
cos1
)1(
22
22
22

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 7/33
Controle de Sistemas Mecânicos
ComentáriosComentários
São duas equações e duas incógnitas
O K c em geral é encontrado a partir da especificação doerro estacionário
)(11)( s P
TsTs K sG c +
+= α 1 0
1 1lim ( )est n
n i s
e K s K P s+
→
= =e da tabela de erroestacionário e dasconstantes de erro

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 8/33
Controle de Sistemas Mecânicos
ComentáriosComentários
)cos()cos(
cos
K K cc
K K c K
K cg K
c K K
m K K m K m
sinm K m
T
θ θ
α
θ ω θ
−
−=
−=
Finalmente resolvendo o sistemas de equações chega-
se às expressões
resp=solve('kc*(alpha*T^2*wcg^2+1)/(T^2*wcg^2+1)=mk*cos(tethak)','kc*T*wcg*(alpha-1)/(T^2*wcg^2+1)=mk*sin(tethak)',alpha,T)

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 9/33
Controle de Sistemas Mecânicos
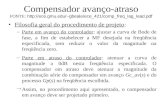
ExemploExemplo
)5)(1(1
)()(
++=
s s s sU sY
Aplicar a metodologia analítica para projetar um
controlador PD com margem de fase de 45 ° , nafreqüência de cruzamento de ganho de 5 rad/s e erroestacionário a rampa de 5.

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 10/33
Controle de Sistemas Mecânicos
SoluçãoSolução
Valores na futura freqüência de cruzamento de
ganho
clear all clear all
closeclose all all ,, clc clc s=tf('s');s=tf('s');P=1/(s*(s+1)*(s+5));P=1/(s*(s+1)*(s+5));figure(1), bode(P)figure(1), bode(P)

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 11/33
Controle de Sistemas Mecânicos
ContinuandoContinuando
Projeto do controlador PDwcg wcg =5.0; MF=45*pi/180;=5.0; MF=45*pi/180;np=1;np=1; dpdp == poly poly ([0 ([0 --11 --5]); kc=1;5]); kc=1;P=P= tf tf (np,(np, dpdp ); );rprp ==freqrespfreqresp (P,j* (P,j* wcg wcg ); );mp=mp= absabs ( ( rprp ); );
tethaptethap ==angleangle ( ( rprp ) )tethak tethak =( =( -- pi+MF pi+MF --tethaptethap ); );mk mk =1/mp=1/mpT=T= --(kc (kc --mk mk * * coscos ( ( tethak tethak ))/ ))/ wcg wcg / / mk mk / / sinsin ( ( tethak tethak ); );alphaalpha ==mk mk *(kc* *(kc* coscos ( ( tethak tethak ) ) --mk mk )/kc/(kc )/kc/(kc --mk mk * * coscos ( ( tethak tethak )); ));nk nk =kc*[ =kc*[ alphaalpha *T 1];*T 1];dk dk =[T 1];=[T 1];K=K=tf tf ( ( nk nk ,,dk dk ); );L=P*K;L=P*K;figure(2),figure(2), marginmargin (L)(L)

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 12/33
Controle de Sistemas Mecânicos
ResultadoResultado
-150
-100
-50
0
50
M a g n i t u d e
( d B )
10-3
10-2
10-1
100
101
102
103
-270
-180
-90
0
P h a s e ( d e g )
Bode Diag ramGm = 14.3 dB (at 12.6 rad/s ec ) , Pm = 45 deg (a t 5 rad/s ec )
Frequency (rad/sec)

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 13/33
Controle de Sistemas Mecânicos
Método analítico Lugar das RaízesMétodo analítico Lugar das Raízes
O método que será visto agora tem base no
lugar das raízes , com o seu desempenhodeterminado pela posição dos pólos de malhafechadaO objetivo assim é projetar um controlador demodo a que o sistema de malha fechadaapresente os pólos especificados os quaisasseguram o desempenho desejado
No pólo desejado corresponde ao ponto –1 , portanto têm-se amplitude de 0 dB com fase-180 °

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 14/33
Controle de Sistemas Mecânicos
Base metodológicaBase metodológica
)(1)(
)()()(
s L sG
s R sY sT
+==
Considerando um sistema de malha fechada, onde a
malha aberta é formada por um controlador em sériecom a planta segundo
Assim um pólo de malha fechada corresponde a uma
raiz do denominador, ou seja
)()()( s K s P s L =
°−=−==+ 18011)(0)(1 D D s L s L

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 15/33
Controle de Sistemas Mecânicos
Método baseado no lugar das raízesMétodo baseado no lugar das raízes
O ganho de malha, incluindo o controlador e a planta, é
dado por
Para um ponto desejado qualquer no plano s, s D=σ D+j ω D, pode-se escrever para a planta
11
)()()()(+
+==
TsTs
K s P s K s P s L cα
P j P D em s P θ =)(

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 16/33
Controle de Sistemas Mecânicos
ContinuandoContinuando
Para esse ponto s D=σ D+j ω D , pode-se escrever para ocontrolador
Considerando s D=σ D+j ω D o pólo desejado
e portanto
K j K
D D
D Dc D em
jT jT
K s K θ
ω σ ω σ α
=++
++=
1)(1)(
)(
)1)(1)(
)((1)(++
+++=−=
D D
D Dc D D D jT
jT K j P s L
ω σ ω σ α
ω σ π
)(1 K P K P j K P
j K
j P emmemem θ θ θ θ π +==−

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 17/33
Controle de Sistemas Mecânicos
FormulaçãoFormulação
Chega-se assim às duas fórmulas básicas para
a amplitude e a fase do controlador
ou ainda,
π θ θ −=+
=
K P
K P mm 1
P K
K P mm
θ π θ −−=
=1

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 18/33
Controle de Sistemas Mecânicos
Para o pólo desejadoPara o pólo desejado
Uma vez encontrada a amplitude e a fase necessárias ao
controlador para s D corresponder ao pólo, pode-seescrever
)sin(cos1)(1)(
)( K K K j
K D D
D Dc D jmem
jT jT
K s K K θ θ ω σ ω σ α θ +==
++
++=
)sin(cos)1)(()1)(( K K K D D D Dc jm jT jT K θ θ ω σ ω σ α +++=++
)sinsincos(cossincos K K K K D K K D K K K K D K K D
Dcc Dc
mmT mT jmmT mT
T jK K T K
θ θ σ θ ω θ θ ω θ σ
ω α σ α ++++−=
=++

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 19/33
Controle de Sistemas Mecânicos
ComparandoComparando
Igualando os termos reais e imaginários,
obtém-se duas equações
K K K K D K K Dc Dc mmT mT K T K θ θ ω θ σ σ α cossincos +−=+
K K K K D K K D Dc mmT mT T K θ θ σ θ ω ω α sinsincos ++=

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 20/33
Controle de Sistemas Mecânicos
ComentáriosComentários
Novamente, são duas equações e duas incógnitas, o
que pode ser resolvido facilmente
)(sincossin
22
D D K K
K K D Dc K K D
mm K m
T ω σ θ
θ ω ω θ σ +
−+−=
)cossin()sincos(
K K D Dc K K Dc
K Dc K D K Dc K
m K m K K m K m
θ ω ω θ σ θ σ ω θ ω
α −+
+−=

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 21/33
Controle de Sistemas Mecânicos
ComentáriosComentários
11
)()()()( +
+== Ts
Ts K s P s K s P sG c
α
Havendo uma especificação do erro estacionário, aconstante K C pode ser encontrada através de
1 0
1 1lim ( )est n
n i se K s K P s+
→
= =
est si
nn e
s P K s K 1
)( 01 ===+

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 22/33
Controle de Sistemas Mecânicos
ExemploExemplo
)5)(1(1
)()(
++=
s s s sU sY
Para a planta abaixo, aplicar a metodologia analítica
para projetar um controlador que assegure um PSS de5% e um tempo de estabilização de 4 segundos.

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 23/33
Controle de Sistemas Mecânicos
SoluçãoSolução
Dado o PSS encontra-se o fator de amortecimento
desejado usando
Encontra-se a freqüência natural usando
)100
(ln
)100
ln(
22
PSS
PSS
+
=
π ζ
en
ne T
T ζ
ω ζω
44 ==

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 24/33

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 25/33
Controle de Sistemas Mecânicos
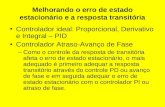
Resposta ao degrau Resposta ao degrau
0 5 10 15 20 25 30 35 40 450
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Step Res ponse
Time (s ec )
A m p l i t u
d e
1
4
%5
=
=
=
c
e
K
sT
PSS

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 26/33
Controle de Sistemas Mecânicos
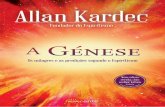
Posição dos pólosPosição dos pólos
-6 -5 -4 -3 -2 -1 0-1.5
-1
-0.5
0
0.5
1
1.5Pole-Ze ro Map
Real Axis
I m a g i n a r y
A x i s

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 27/33
Controle de Sistemas Mecânicos
FinalizandoFinalizando
Uma vez projetado checar os requisitos. Caso não
satisfaça, analisar e fazer as devidas correções
4.4
4%5
=
=
=
c
e
K
sT PSS
-6 -5 -4 -3 -2 -1 0-1.5
-1
-0.5
0
0.5
1
1.5Pole-Ze ro Map
Real Axis
I m a g i n a r y
A x i s

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 28/33
Controle de Sistemas Mecânicos
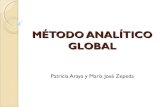
FinalizandoFinalizando
Uma vez projetado checar os requisitos. Caso nãosatisfaça, analisar e fazer as devidas correções
4.4
8.3%5
=
=
=
c
e
K
sT PSS
Step Res ponse
Time (s ec )
A m p l i t u d e
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
1.2
1.4 System: HPeak amplitude: 1.04Overshoot (%): 3.64At time (s ec): 3.15
Sys tem: HSe ttling Time (s ec ): 3.98

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 29/33
Controle de Sistemas Mecânicos
ExercícioExercício
Considerando o motor CC controlado por armadura abaixo,aplique a metodologia analítica para encontrar um controlador avanço ou atraso de posição que apresente a um PSS de 4% eum tempo de estabilização de 2 s.
20.2
0.2 /
0.2 / /
0.1 / / 2
0.1 / /
a
a
T
b
L Hy
K N m A
K V rad seg
J N m rad seg
C N m rad seg
= Ω
=
= −
=
= −
= −
+
-c
V a
I a
τ θ
Ra La
K T
Κ bΩ
+
-J

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 30/33
Controle de Sistemas Mecânicos
Diagrama de blocosDiagrama de blocos
Motor CC controlado por armadura

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 31/33
Controle de Sistemas Mecânicos
SoluçãoSolução
Substituindo os valores respectivos o DB fica

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 32/33
Controle de Sistemas Mecânicos
FT deFT de malha abertamalha aberta
Função de transferência da planta
dp=poly([ -1 -10]);np=10p1=tf(np,dp);p2=feedback(p1,0.2);p3=tf(1,[1 0]);P=p3*p2;
2
( ) 10( ) ( 11 12)r
sV s s s s
Θ=
+ +

8/6/2019 Apostila Controle - 22 - Projeto Avanço / Atraso Analítico
http://slidepdf.com/reader/full/apostila-controle-22-projeto-avanco-atraso-analitico 33/33