Apostila Controle - 19a - Visualização da Estabilidade Relativa
27
Controle de Sistemas Mecânicos Visualização da Estabilidade Relativa Visualização da Estabilidade Relativa Visualização das Margens Diagramas de Bode Diagrama de Nyquist Diagrama de Nichols Margem de Redução de Ganho Correlação entre MF e fator de amortecimento
Transcript of Apostila Controle - 19a - Visualização da Estabilidade Relativa
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 1/27
Controle de Sistemas Mecânicos
Visualização da Estabilidade Relativa Visualização da Estabilidade Relativa
Visualização das Margens
�D
iagramas de Bode� Diagrama de Nyquist
� Diagrama de Nichols
Margem de Redução de Ganho
Correlação entre MF e fator de amortecimento
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 2/27
Controle de Sistemas Mecânicos
Vizualização das margens Vizualização das margens
As margens podem ser visualizadas
diretamente nos diagramas de Bode,Nyquist e Nichols.
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 3/27
Controle de Sistemas Mecânicos
U sando os diagramas de Bode U sando os diagramas de Bode
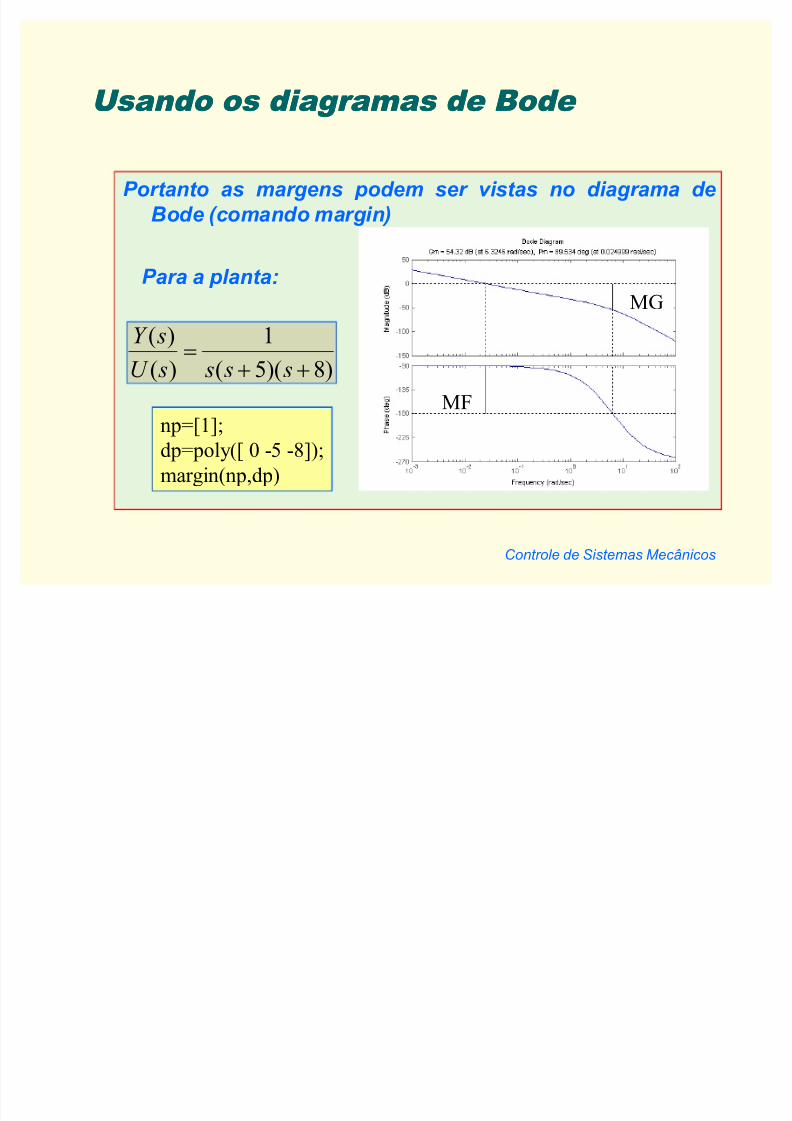
P ortanto as margens podem ser vistas no diagrama de
Bode (comando margin)
( ) 1
( ) ( 5)( 8)
Y s
U s s s s!
np=[1];
d p=poly([ 0 -5 -8]);
margin(np,d p)
P ara a planta:
MF
MG

8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 4/27
Controle de Sistemas Mecânicos
N o diagrama de Nyq uist N o diagrama de Nyq uist
zer o raio unitário
180 cr uzamento com o eixo r eal negativoo
Db �
�
Considerando
o ponto onde
no Diagrama
de Bode
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 5/27
Controle de Sistemas Mecânicos
M argens no diagrama de Nyq uist M argens no diagrama de Nyq uist
Rea l A x i s
I m
a g i n a r y
A x i s
Ny qu i s t D iag r am s
-1.5 -1 -0 .5 0 0 .5 1 1.5
-1
-0.5
0
0. 5
1
MF
1/K mg
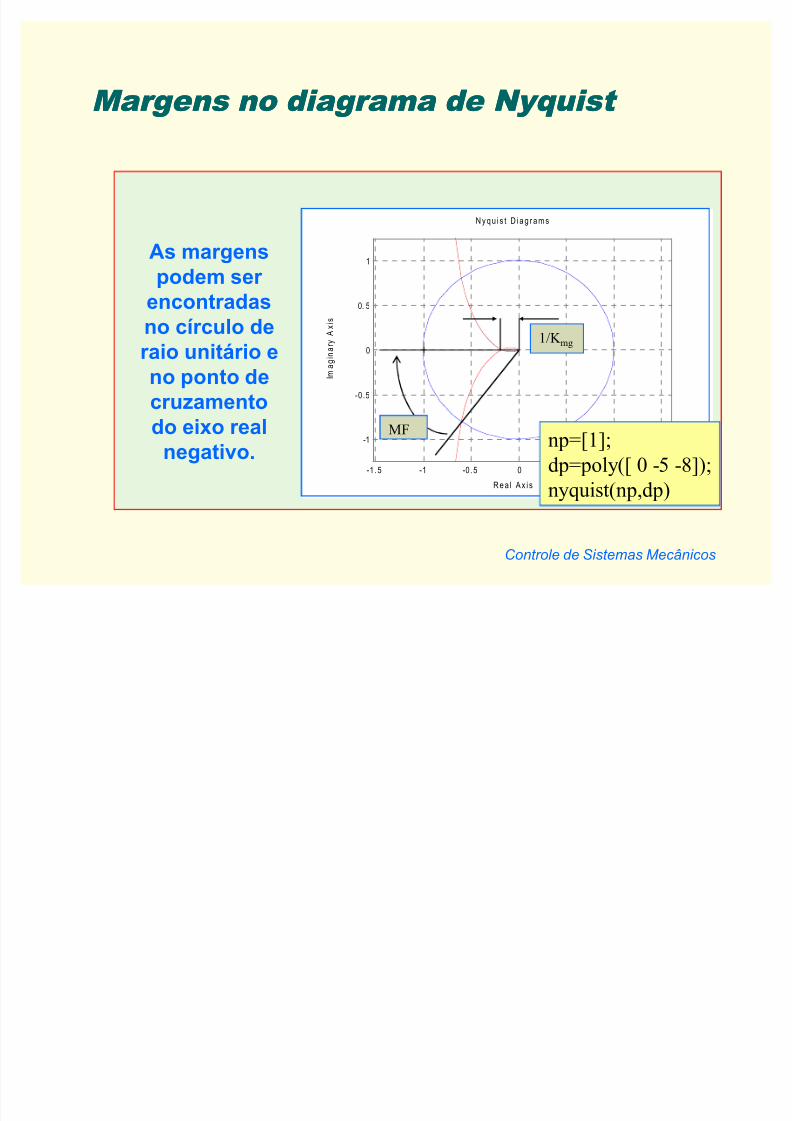
As margens
podem ser encontradas
no círculo de
raio unitário e
no ponto de
cruzamento
do eixo real
negativo.
np=[1];
d p=poly([ 0 -5 -8]);
nyquist(np,d p)
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 6/27
Controle de Sistemas Mecânicos
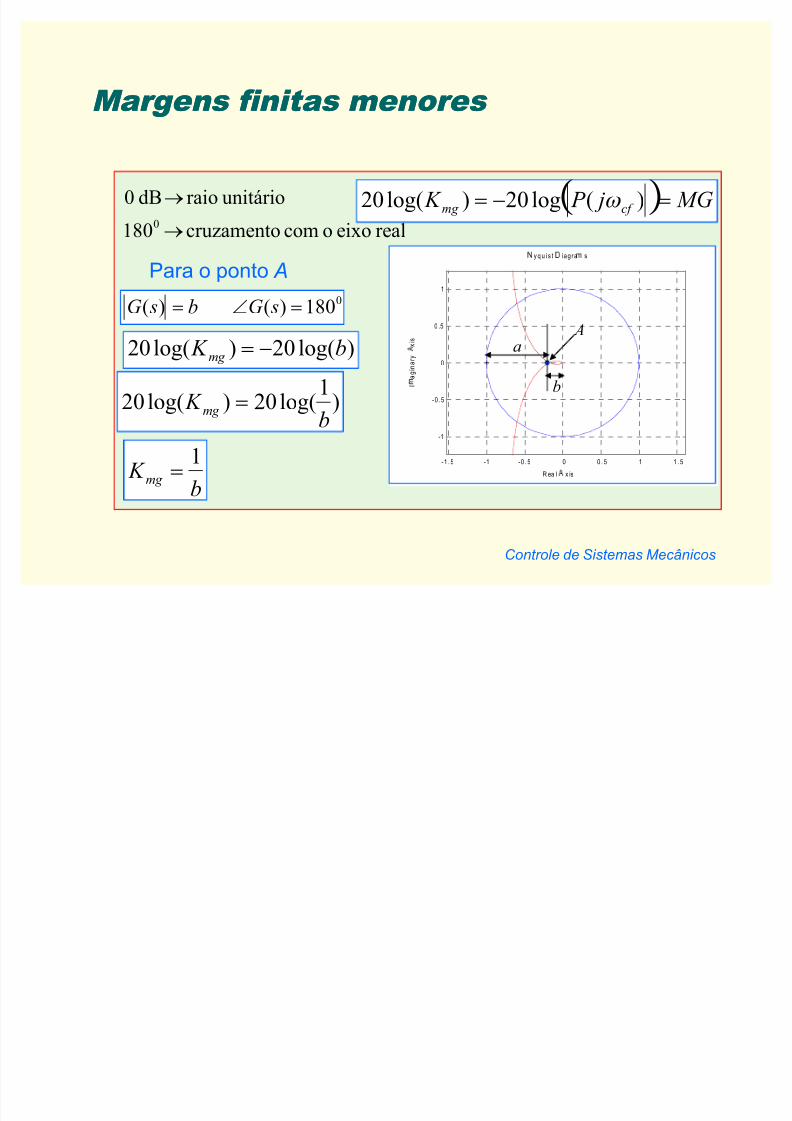
M argens finitas menores M argens finitas menores
R ea l
x is
I
¡
a g i n a r y
¢
x i s
£ y qu i s t ¤ iagra ¥ s
-1 . 5 -1 -0 . 5 0 0 . 5 1 1 . 5
-1
-0.5
0
0 .5
1
A
b
a
r ealeixoocomcr uzamento180
unitárioraiodB0
0 p
p
Para o ponto A0180)( )( !�! sGb sG
MG j P K cf mg !! )(log20)log(20 [
)log(20)log(20 b K m g !
)1
log(20)log(20b
K m g
!
b K
m g
1!
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 7/27
Controle de Sistemas Mecânicos
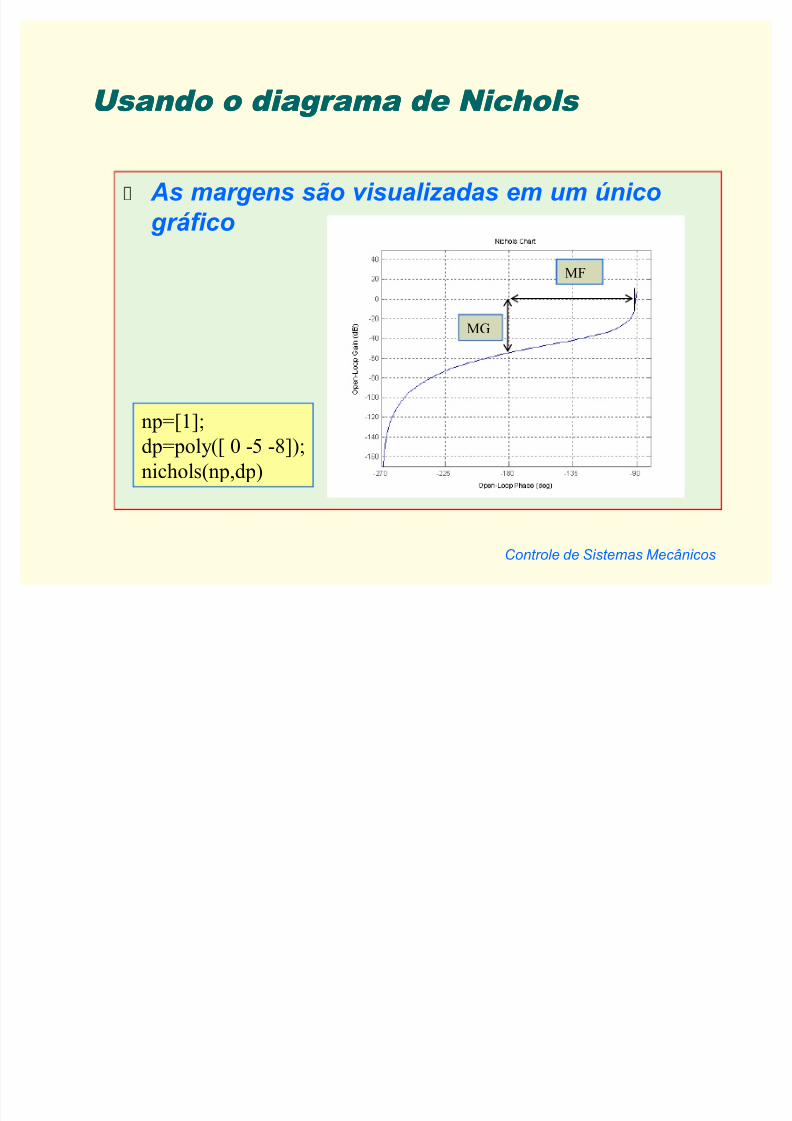
U sando o diagrama de N ichols U sando o diagrama de N ichols
As margens são visualizadas em um único
gráfico
np=[1];d p=poly([ 0 -5 -8]);
nichols(np,d p)
MF
MG
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 8/27
Controle de Sistemas Mecânicos
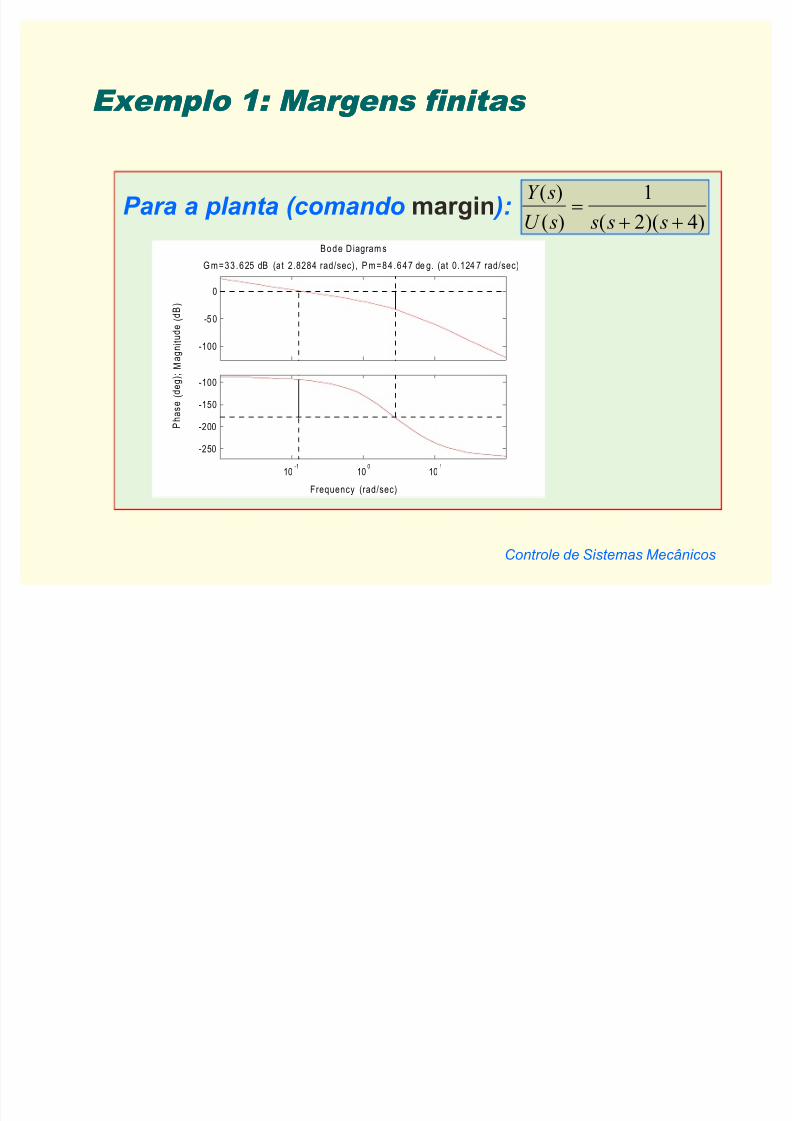
Exemplo 1: M argens finitas Exemplo 1: M argens finitas
P ara a planta (comando margin ):Y s
U s s s s
( )
( ) ( )( )!
1
2 4
Frequency (rad/sec)
P h a
s e
( d e g ) ; M
a g n i t u d e
( d B )
B o d e Diagram s
-100
-5 0
0
G m=33.625 dB (at 2.8284 rad/sec), P m=84.647 de g. (at 0.124 7 rad/sec)
10-1
100
101
-250
-200
-150
-100
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 9/27
Controle de Sistemas Mecânicos
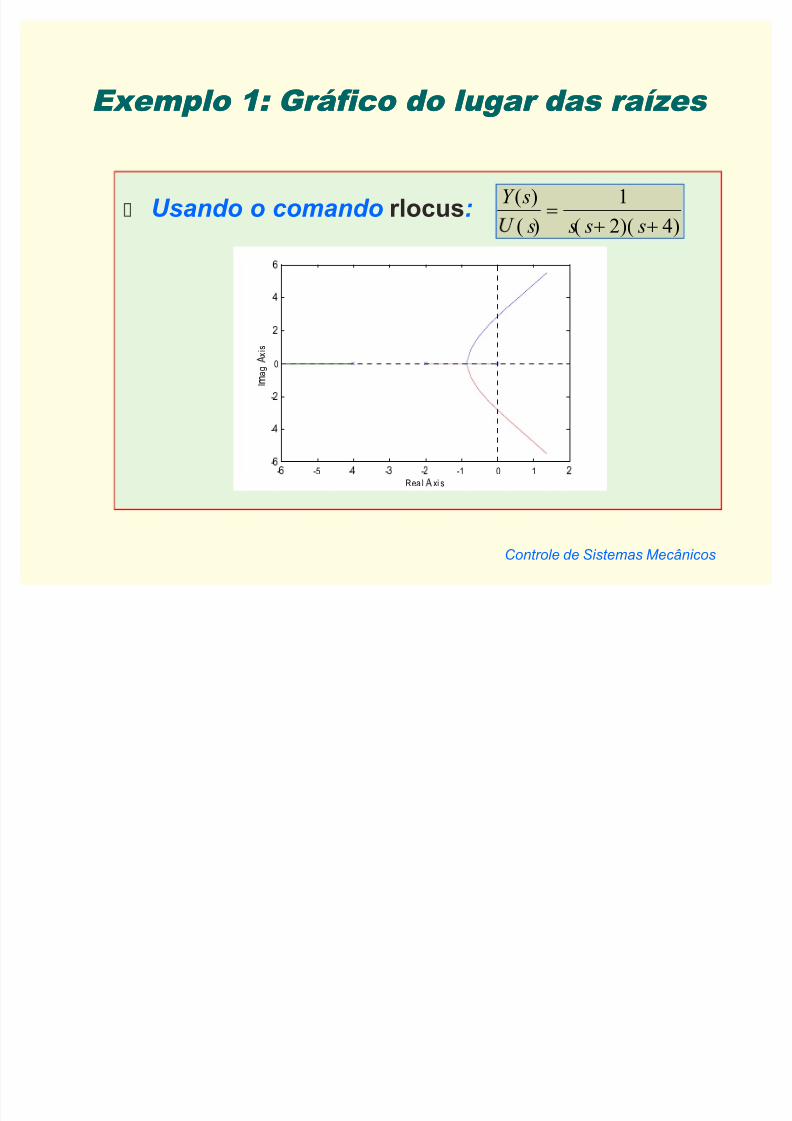
Exemplo 1: Gráfico do lugar das raízes Exemplo 1: Gráfico do lugar das raízes
U sando o comando rlocus:Y s
s s s s
( )
( ) ( )( )!
1
2 4
-¦
-5 -§
- ̈
-©
-1 0 1©
-¦
-§
-©
0
©
§
¦
Rea l
xi s
I
a g
x i s
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 10/27
Controle de Sistemas Mecânicos
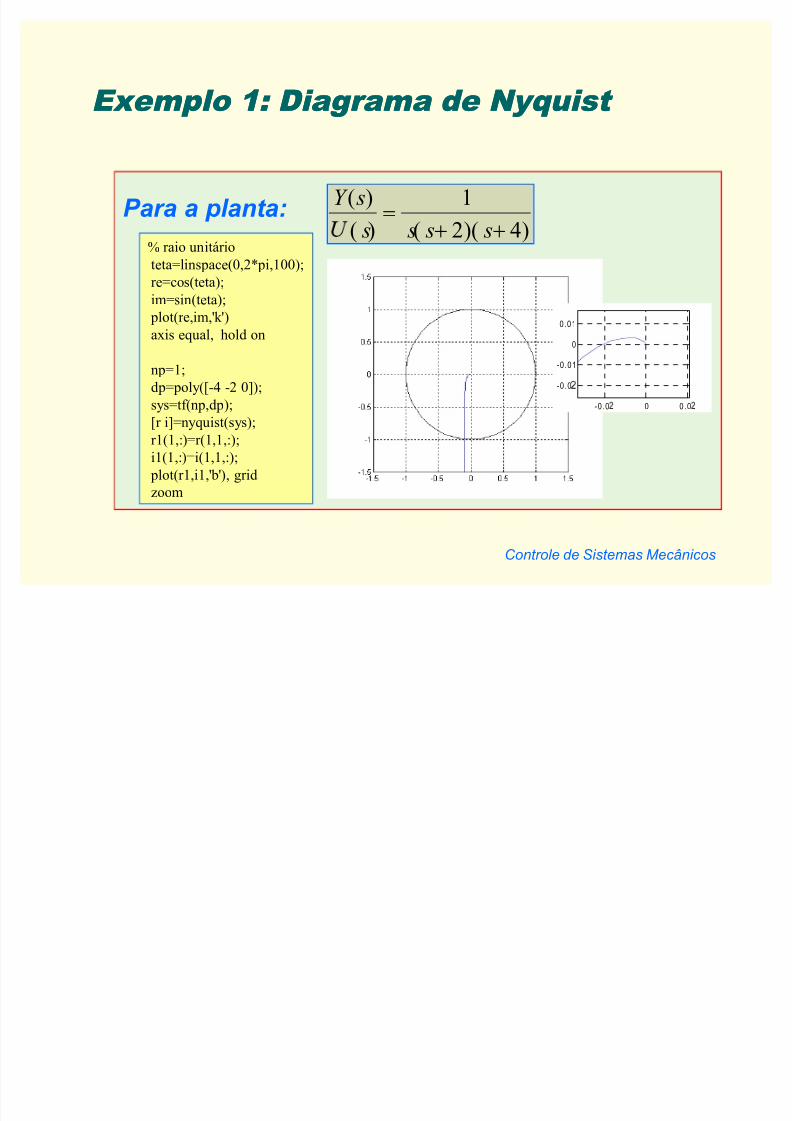
Exemplo 1: Diagrama de Nyq uist Exemplo 1: Diagrama de Nyq uist
P ara a planta:Y s
s s s s
( )
( ) ( )( )!
1
2 4
-0.0
0 0.0
-0.0
-0.01
0
0.01
% raio unitário
teta=lins pace(0,2* pi,100);
r e=cos(teta);
im=sin(teta);
plot(r e,im,'k')
axis equal, hold on
np=1;
d p=poly([-4 -2 0]);
sys=tf(np,d p);
[r i]=nyquist(sys);
r1(1,:)=r(1,1,:);
i1(1,:)=i(1,1,:);
plot(r1,i1,'b'), grid
zoom
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 11/27
Controle de Sistemas Mecânicos
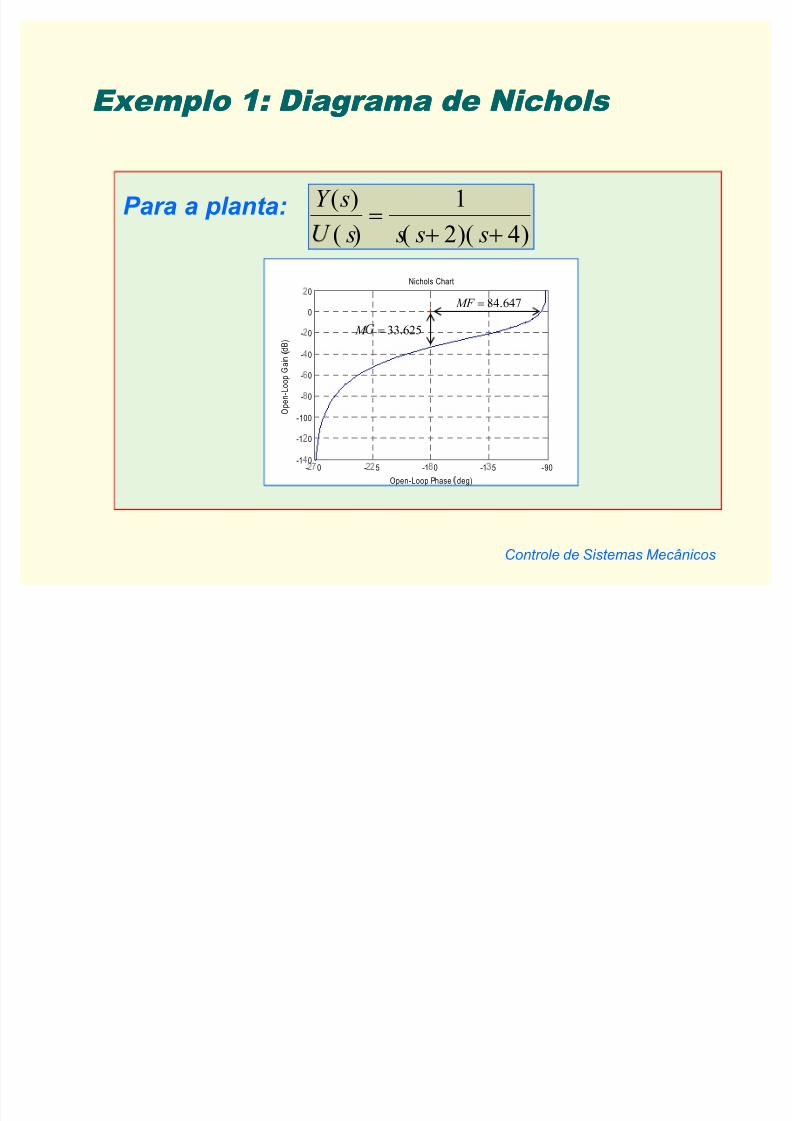
Exemplo 1: Diagrama de N ichols Exemplo 1: Diagrama de N ichols
P ara a planta: Y s
s s s s
( )
( ) ( )( )!
1
2 4
-
0 -
5 -1
0 -1
5 -90-1
0
-1
0
-100
-
0
-
0
-
0
-
0
0
0
Nichols Chart
Open-Loop Phase
deg)
O p e n -
L o o p G a i n
!
d B )
625.33! M "
647.84!MF
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 12/27
Controle de Sistemas Mecânicos
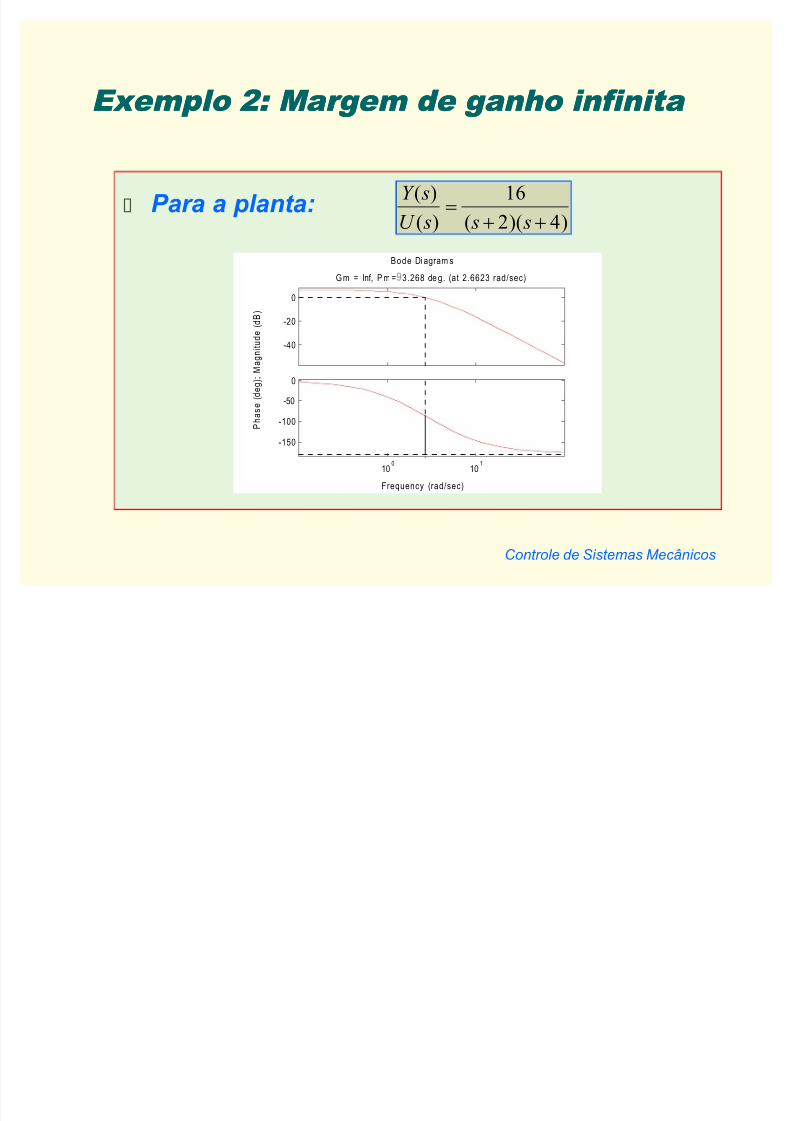
Exemplo 2: M argem de ganho infinita Exemplo 2: M argem de ganho infinita
P ara a planta:Y s
U s s s
( )
( ) ( )( )!
16
2 4
Frequency (rad/sec)
P h a
s e
( d e g ) ; M
a g n i t u d e
( d B )
B o d e Di agram s
-40
-20
0
G m = Inf, P m =#
3.268 de g . (a t 2.6623 rad/sec)
100
101
-150
-100
-50
0
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 13/27
Controle de Sistemas Mecânicos
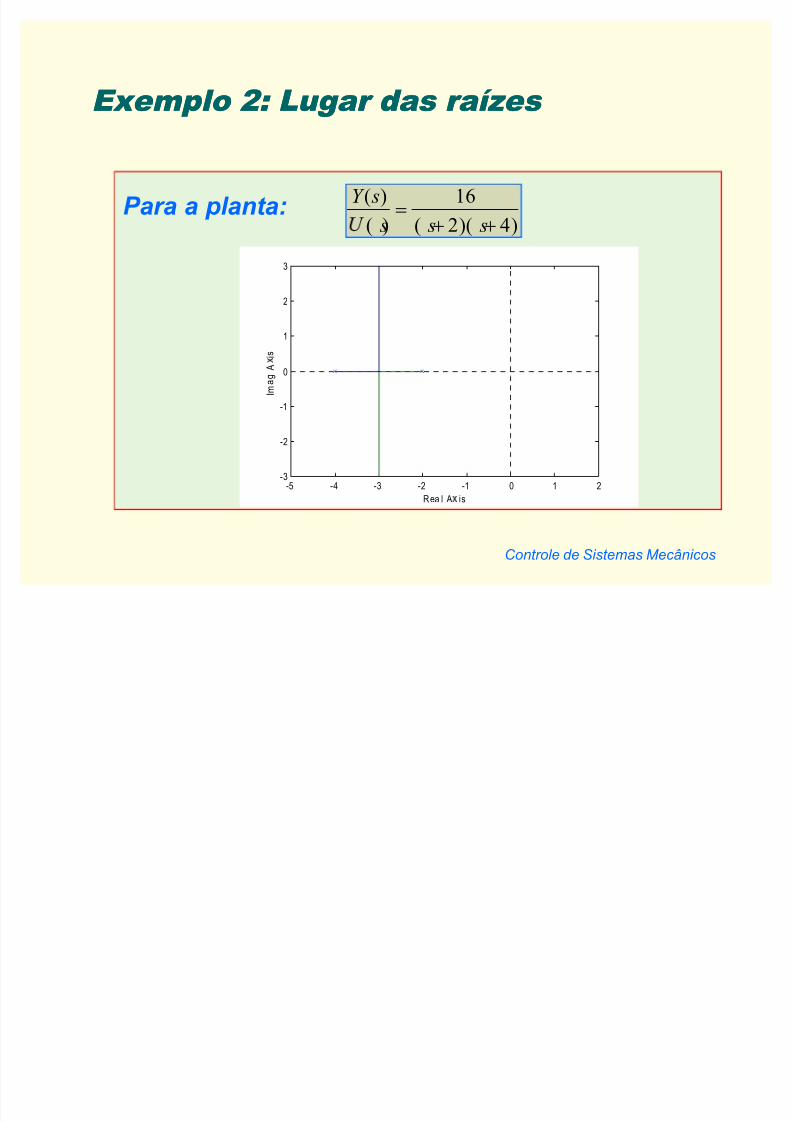
Exemplo 2: Lugar das raízes Exemplo 2: Lugar das raízes
P ara a planta:Y s
s s s
( )
( ) ( )( )!
16
2 4
-5 -4 -3 -2 -1 0 1 2-3
-2
-1
0
1
2
3
R ea l A$
is
I m
a g
A
%
i s
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 14/27
Controle de Sistemas Mecânicos
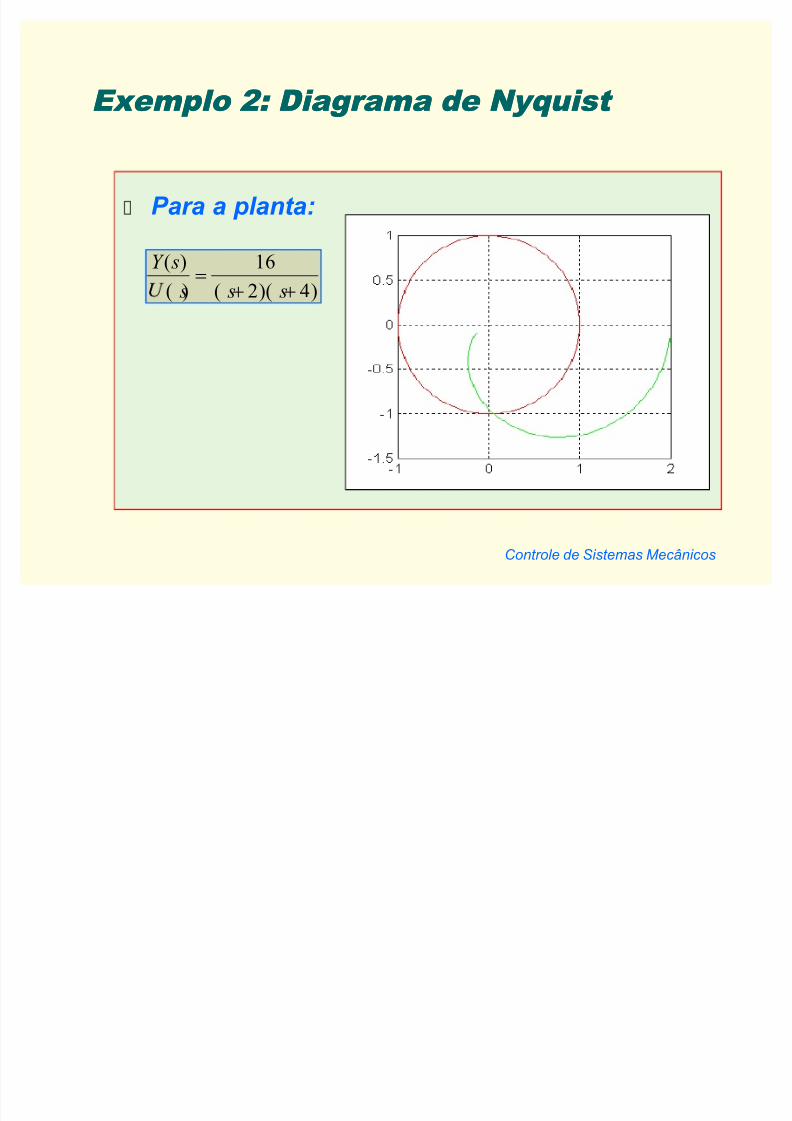
Exemplo 2: Diagrama de Nyq uist Exemplo 2: Diagrama de Nyq uist
P ara a planta:
Y s
s s s
( )
( ) ( )( )!
16
2 4
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 15/27
Controle de Sistemas Mecânicos
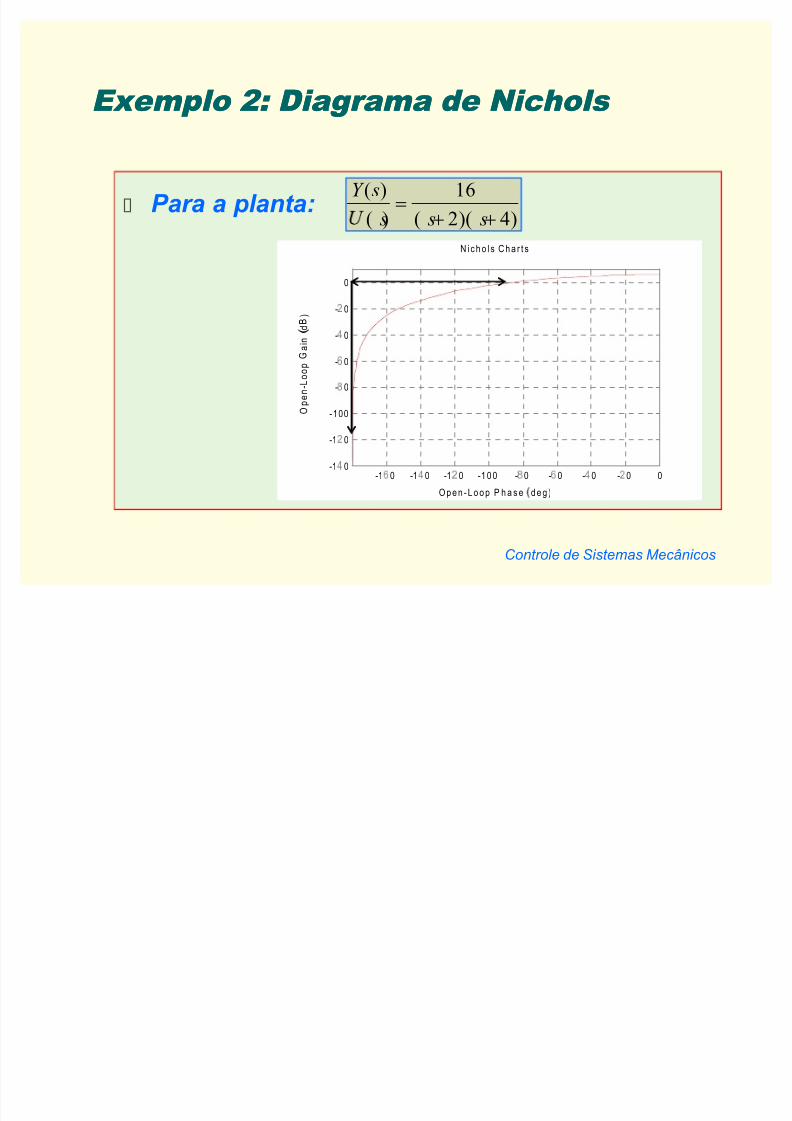
Exemplo 2: Diagrama de N ichols Exemplo 2: Diagrama de N ichols
P ara a planta:Y s
s s s
( )
( ) ( )( )!
16
2 4
O p e n - L o o p P h a s e & d e g )
O
p e n -
L o o p
G
a i n
'
d B )
N i c h o l s C h a r t s
-1(
0 -1)
0 -10
0 -1 0 0 -1
0 -(
0 -)
0 -0
0 0-1
)
0
-10
0
-100
-1
0
-(
0
-)
0
-0
0
0
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 16/27
Controle de Sistemas Mecânicos
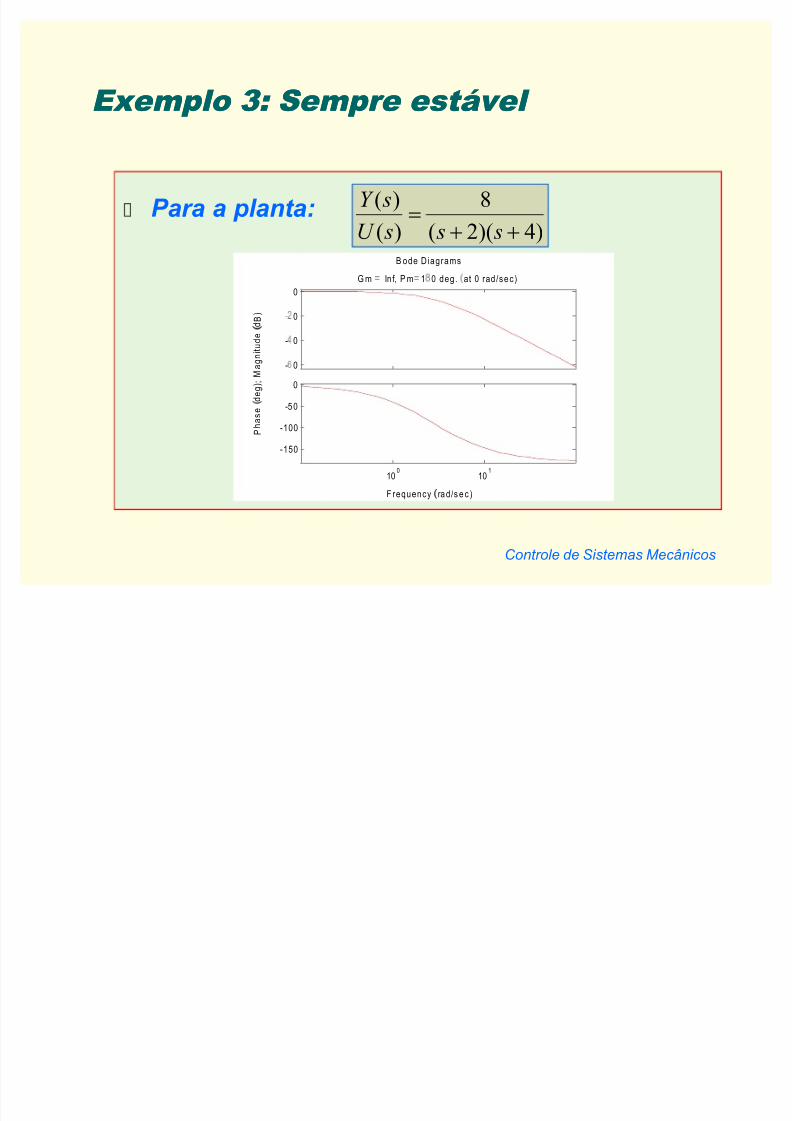
Exemplo 3: Sempre estável Exemplo 3: Sempre estável
P ara a planta:)4)(2(
8
)(
)(
!
s s sU
sY
F requency 2 rad /s e c )
P h a s
e
3
d e g ) ; M
a g n i t u d e
3
d B )
B ode Diagrams
-4
0
-5
0
-6
0
0G m
7
In f, P m7
18
0 deg. 2 at 0 rad /sec )
100
101
-150
-100
-50
0
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 17/27
Controle de Sistemas Mecânicos
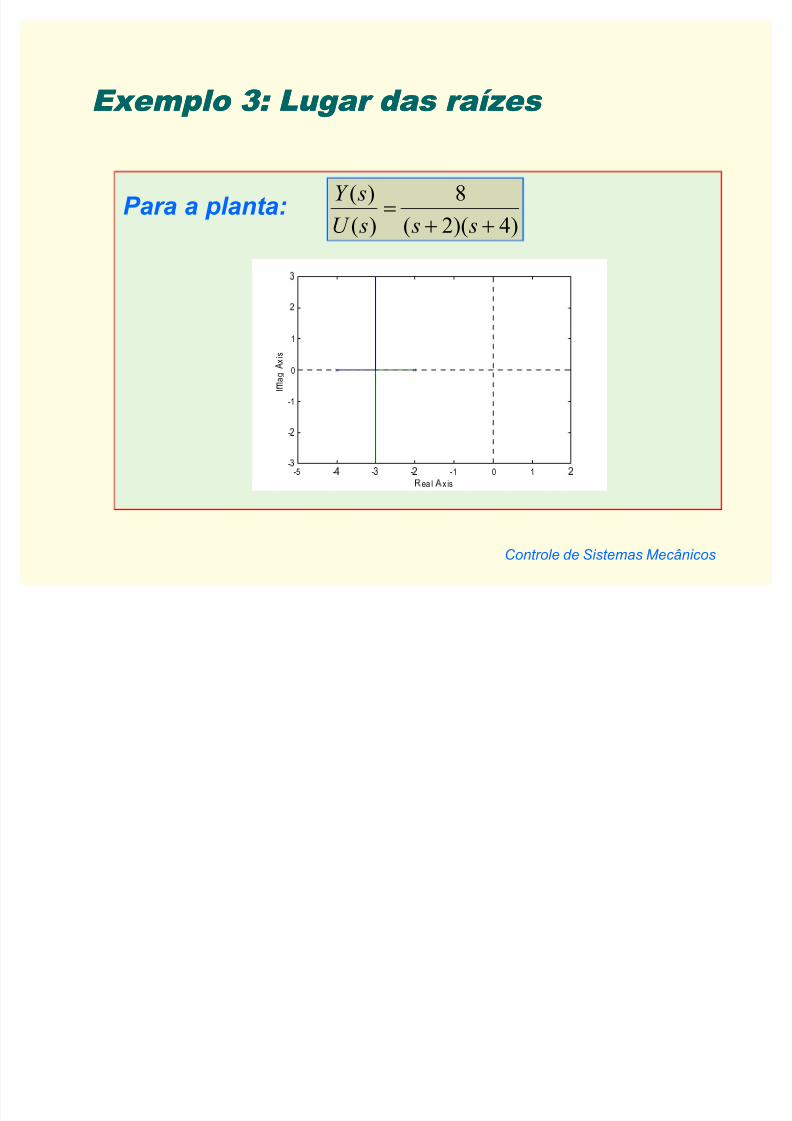
Exemplo 3: Lugar das raízes Exemplo 3: Lugar das raízes
P ara a planta:)4)(2(
8
)(
)(
!
s s sU
sY
-5 -9
-@
-A
-1 0 1A
-@
-A
-1
0
1
A
@
B ea lC
x is
I
D
a g
E
x i s
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 18/27
Controle de Sistemas Mecânicos
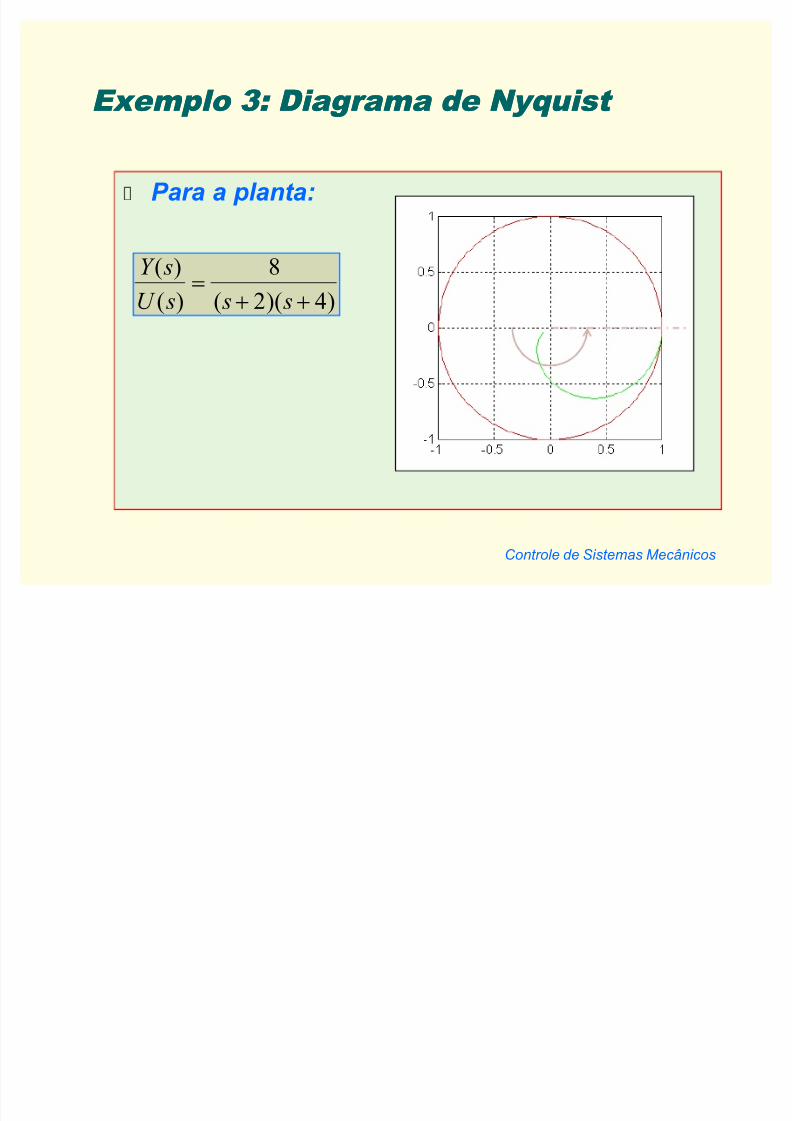
Exemplo 3: Diagrama de Nyq uist Exemplo 3: Diagrama de Nyq uist
P ara a planta:
Y sU s s s
( )( ) ( )( )
!
82 4
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 19/27
Controle de Sistemas Mecânicos
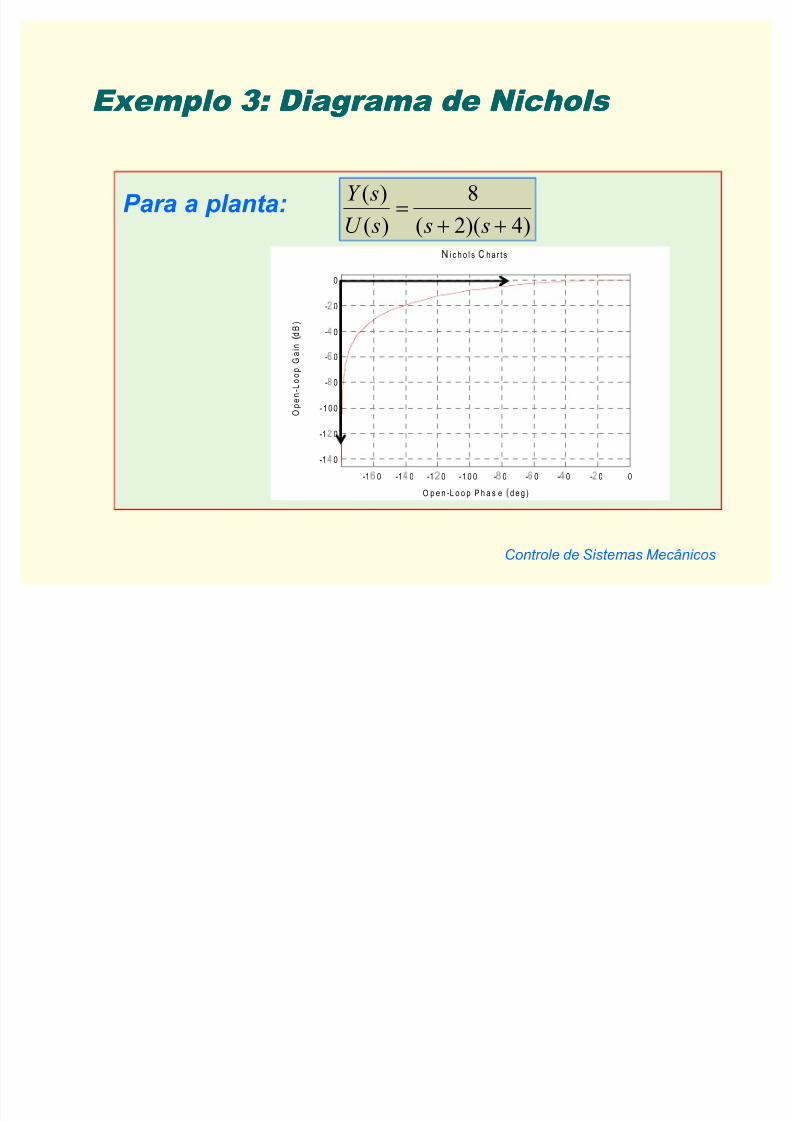
Exemplo 3: Diagrama de N ichols Exemplo 3: Diagrama de N ichols
P ara a planta:
O p e n -L o o p P h a s eF
d e g )
O
p e n -
L o o p
G
a i n
G
d B )
H i c h o l sI
h a r t s
-1P
0 -1Q
0 -1R
0 -1 0 0 -S
0 -P
0 -Q
0 -R
0 0
-1Q
0
-1R
0
-1 0 0
-S
0
-P
0
-Q
0
-R
0
0
)4)(2(
8
)(
)(
!
s s sU
sY
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 20/27
Controle de Sistemas Mecânicos
Exemplo 4: M argem de redução de Exemplo 4: M argem de redução de
ganho ganho
Para a planta cuja FT é
calcule a margem de ganho e margem de fase e justifique o resultado
2
3
3 6 4( )
1
s s s
s
!
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 21/27
Controle de Sistemas Mecânicos
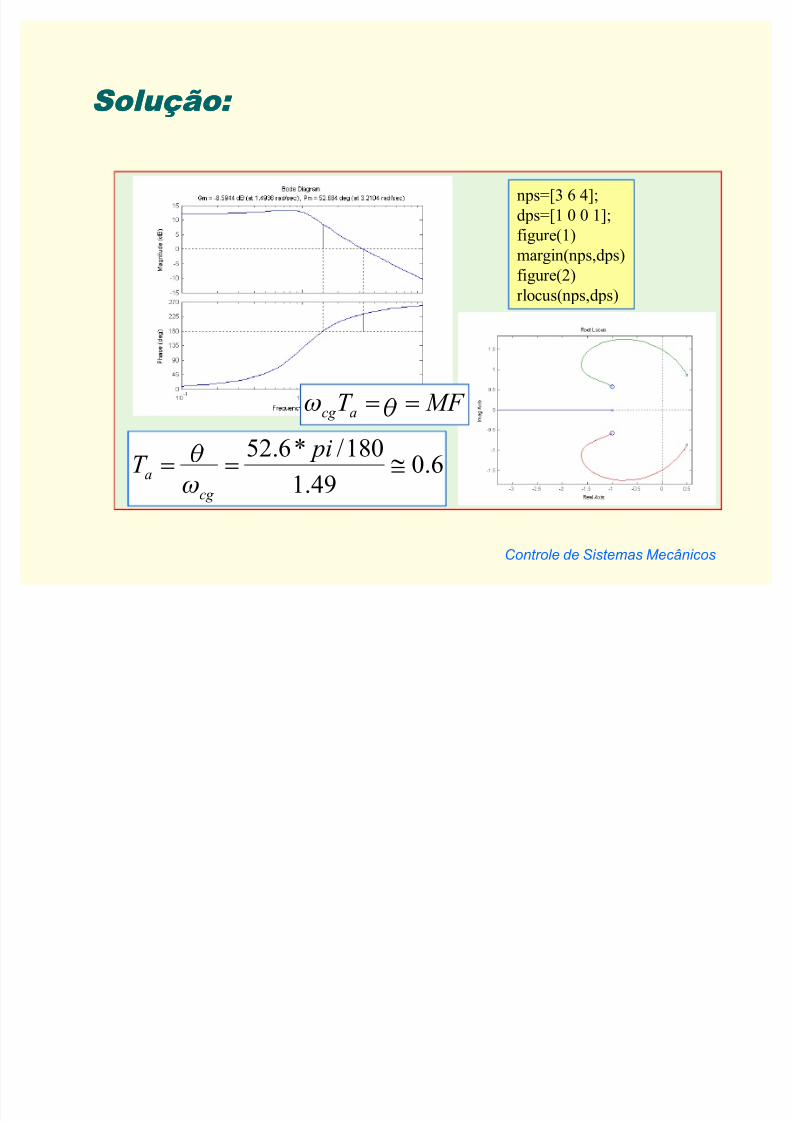
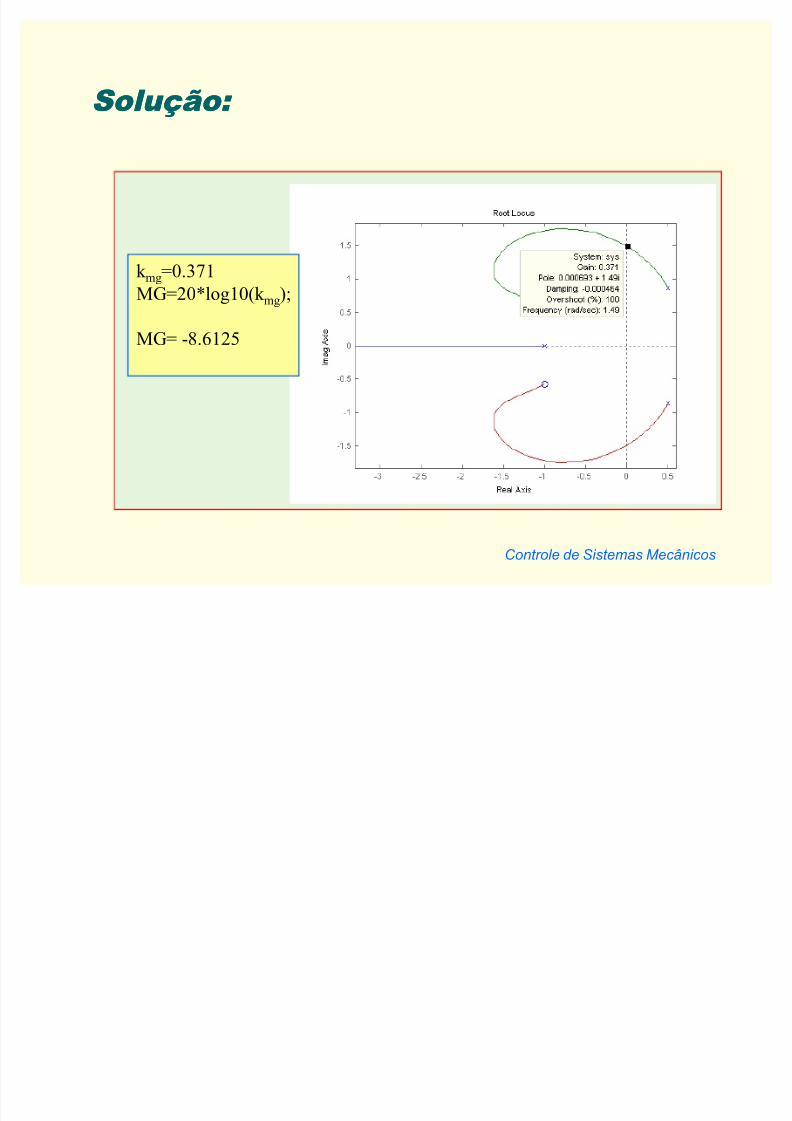
Solução: Solução:
nps=[3 6 4];
d ps=[1 0 0 1];
figur e(1)
margin(nps,d ps)
figur e(2)r locus(nps,d ps)
MF T acg
!! U[
6.049.1
180/*6.52$!!
piT
cg
a[
U
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 22/27
Controle de Sistemas Mecânicos
Solução: Solução:
k mg=0.371MG=20*log10(k mg);
MG= -8.6125
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 23/27
Controle de Sistemas Mecânicos
C orrelação entre MF e C orrelação entre MF e ^ ^ , , Z Z cg cg e e Z Z nT nT
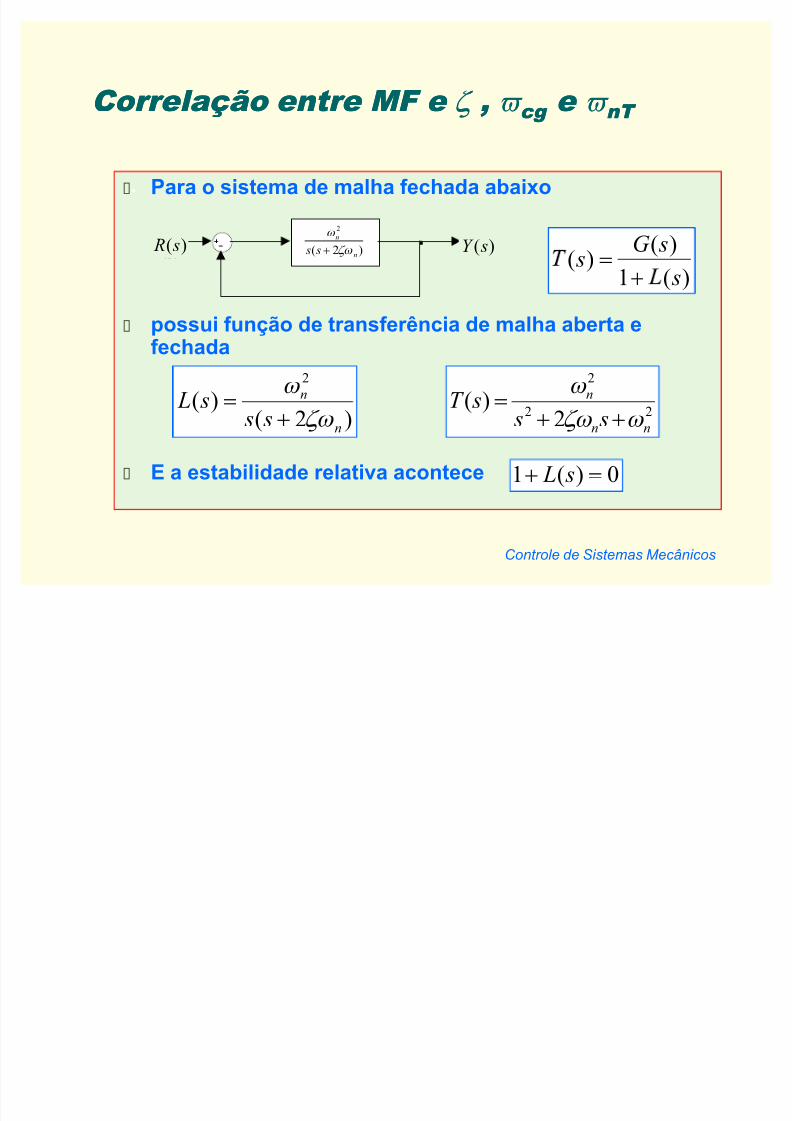
Para o sistema de malha fechada abaixo
possui função de transferência de malha aberta efechada
E a estabilidade relativa acontece
1
O u t 1
0 s
s
1
I n 1)2(
2
n
n
s s ^[
[
)( s R )( sY
)2()(
2
n
n
s s s L
^ [
[
!
)(1
)()(
s
sG s
!
0)(1 ! s L
22
2
2)(
nn
n
s s sT
[ ^ [
[
!

8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 24/27
Controle de Sistemas Mecânicos
C álculo do módulo e fase de G(j C álculo do módulo e fase de G(j Z Z ) )
Para s=jZ
Calculando o módulo e isolando as
freqüências tem-se
Calculando a fase tem-se
24 241 ^ ^ [ [ !ncg
1)( 
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 25/27
Controle de Sistemas Mecânicos
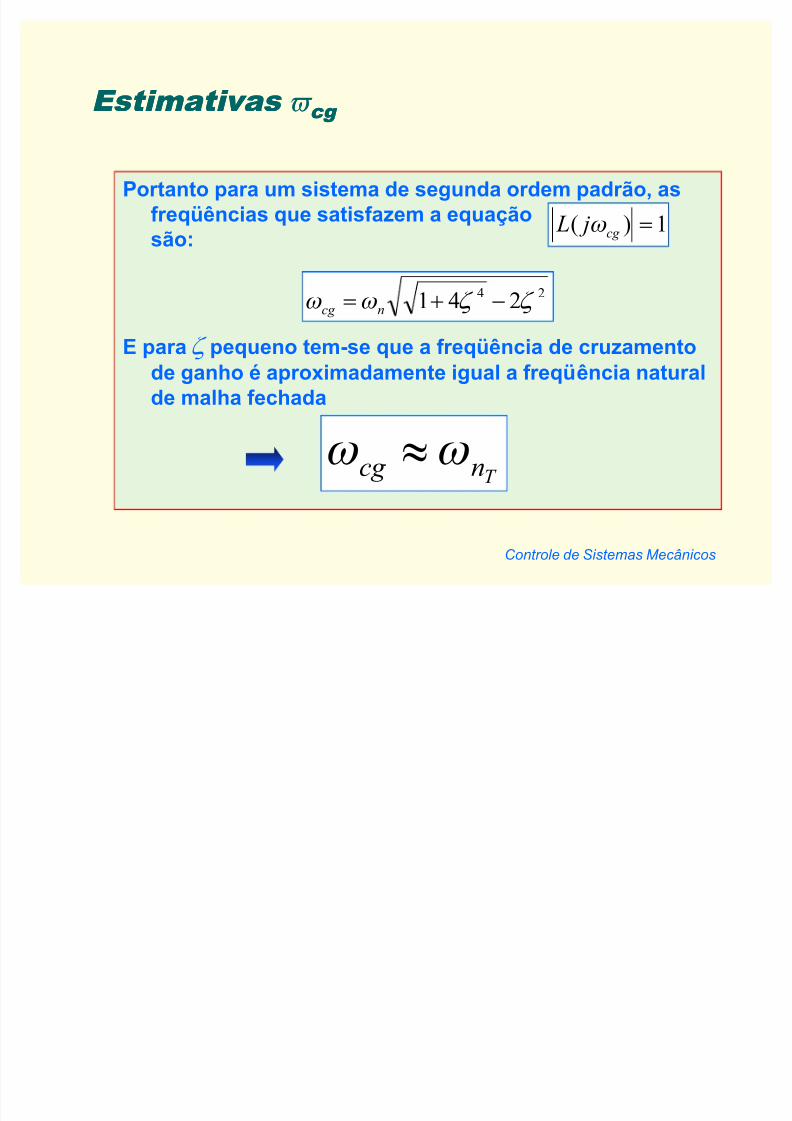
Estimativas Estimativas Z Z cg cg
Portanto para um sistema de segunda ordem padrão, as
freqüências que satisfazem a equação
são:
E para ^ pequeno tem-se que a freqüência de cruzamento
de ganho é aproximadamente igual a freqüência natural
de malha fechada
T ncg [ [ }
24241 ^ ^ [ [ !
ncg
1)( !cg j L [
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 26/27
Controle de Sistemas Mecânicos
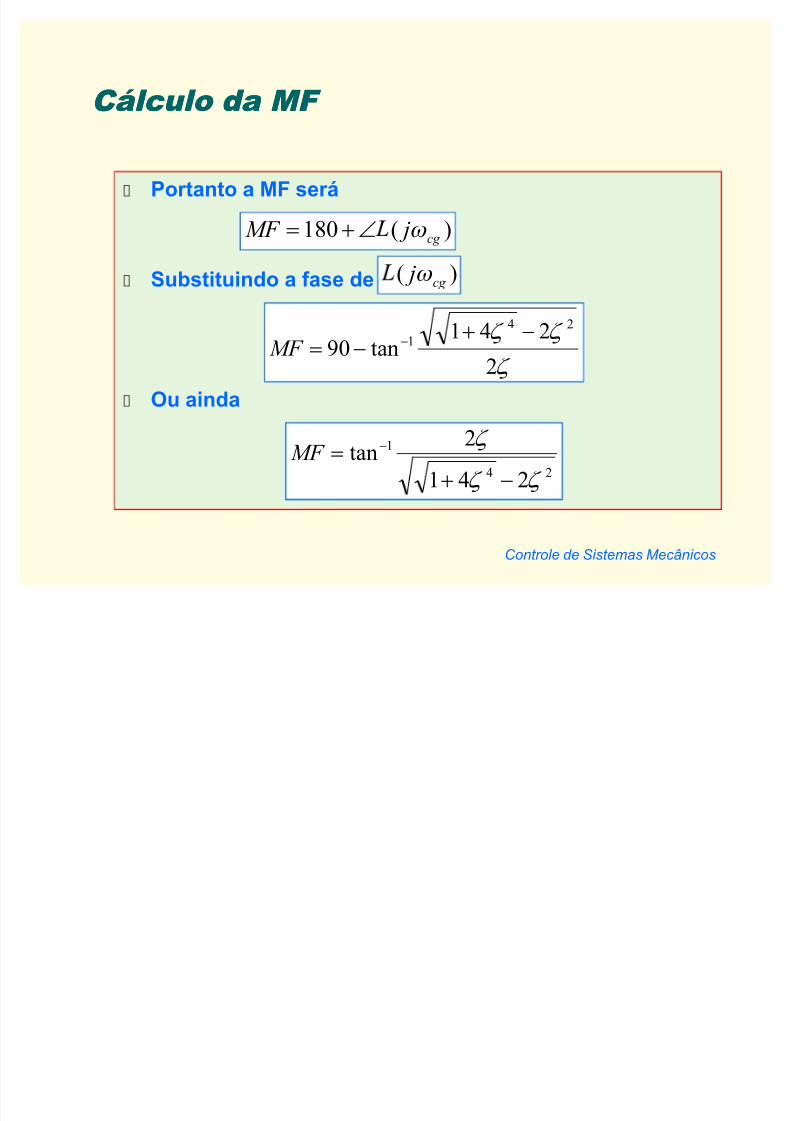
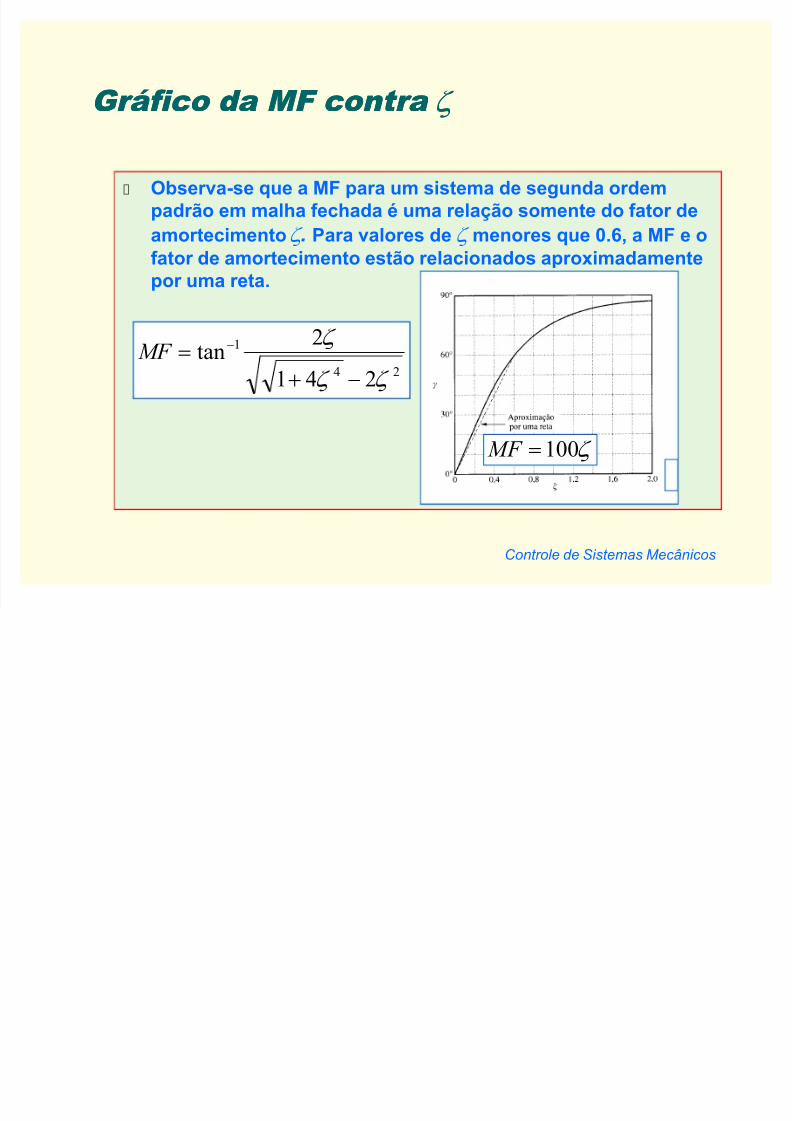
C álculo da MF C álculo da MF
Portanto a MF será
Substituindo a fase de
Ou ainda
)(180 cg jMF [ �!
)( cg j[
^
^ ^
2
241tan90
24
1
!
MF
24
1
241
2tan
^ ^
^
!
MF
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 27/27