Anatomia Del Robot
9
Anatomía del Robót
-
Upload
arturogriz -
Category
Documents
-
view
225 -
download
0
description
KK
Transcript of Anatomia Del Robot

7/17/2019 Anatomia Del Robot
http://slidepdf.com/reader/full/anatomia-del-robot-568e9a17b3f82 1/9
Anatomía del Robót
7/17/2019 Anatomia Del Robot
http://slidepdf.com/reader/full/anatomia-del-robot-568e9a17b3f82 2/9
La Definición más comúnmente aceptada posiblemente sea la de la
Asociación de Industrias Robóticas (RIA), según la cual:
Un robot industrial es un manipulador multifuncional
reprogramable, capa de mo!er materias, pieas, "erramientas, o
dispositi!os especiales, según tra#ectorias !ariables, programadas
para realiar tareas di!ersas$
%sta Definición, ligeramente modificada, "a sido adoptada por la
&rganiación Internacional de %stándares (I'&) ue define al robot
industrial como:
anipulador multifuncional reprogramable con !arios grados delibertad, capa de manipular materias, pieas, "erramientas o
dispositi!os especiales según tra#ectorias !ariables programadas
para realiar tareas di!ersas$

7/17/2019 Anatomia Del Robot
http://slidepdf.com/reader/full/anatomia-del-robot-568e9a17b3f82 3/9
Definición del Robot Industrial
Un robot industrial es un manipulador multifuncionalreprogramable, capaz de mover materias, piezas,herramientas, o dispositivos especiales, segúntrayectorias variables, programadas para realizar tareasdiversas.
Esta definición, ligeramente modificada, ha sido adoptadapor la Organización Internacional de Estándares I!O"#ue define al robot industrial como$
%anipulador multifuncional reprogramable con variosgrados de libertad, capaz de manipular materias, piezas,herramientas o dispositivos especiales según trayectoriasvariables programadas para realizar tareas diversas.

7/17/2019 Anatomia Del Robot
http://slidepdf.com/reader/full/anatomia-del-robot-568e9a17b3f82 4/9
*lasificación del robot industrial
&%anipuladores&'obots de repetición y aprendiza(e
&'obots con control por computador &'obots inteligentes&%icro)robots
7/17/2019 Anatomia Del Robot
http://slidepdf.com/reader/full/anatomia-del-robot-568e9a17b3f82 5/9
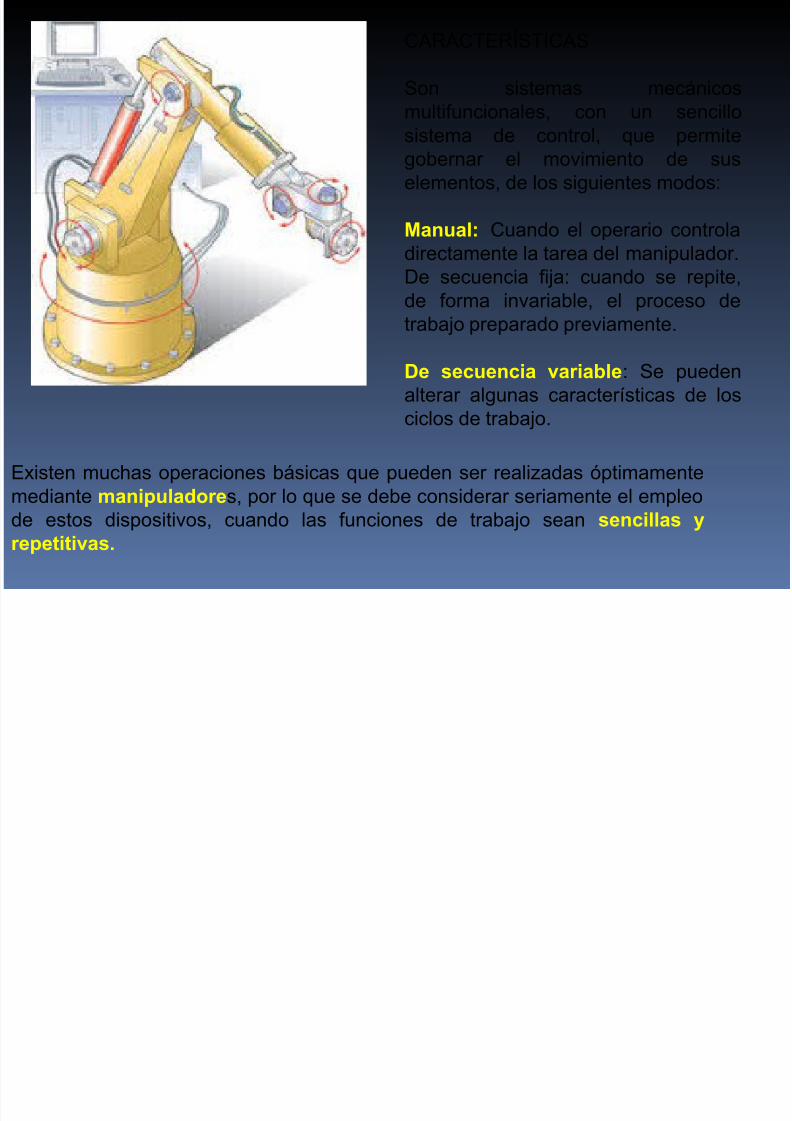
*+'+*E'-!I*+!
!on sistemas mecánicosmultifuncionales, con un sencillo
sistema de control, #ue permitegobernar el movimiento de suselementos, de los siguientes modos$
anual: *uando el operario controladirectamente la tarea del manipulador.
e secuencia fi(a$ cuando se repite,de forma invariable, el proceso detraba(o preparado previamente.
De secuencia !ariable$ !e puedenalterar algunas caracter/sticas de los
ciclos de traba(o.
E0isten muchas operaciones básicas #ue pueden ser realizadas óptimamentemediante manipuladores, por lo #ue se debe considerar seriamente el empleode estos dispositivos, cuando las funciones de traba(o sean sencillas #
repetiti!as$

7/17/2019 Anatomia Del Robot
http://slidepdf.com/reader/full/anatomia-del-robot-568e9a17b3f82 6/9
Robots de repetición o aprendia+e
!on manipuladores #ue se limitana repetir una secuencia demovimientos, previamente
e(ecutada por un operadorhumano, haciendo uso de uncontrolador manual o un dispositivoau0iliar. En este tipo de robots, eloperario en la fase de ense1anza,
se vale de una pistola deprogramación con diversospulsadores o teclas, o bien, de
(oystics, o bien utiliza un mani#u/, oa veces, desplaza directamente la
mano del robot.2os robots de aprendiza(e son los más conocidos, hoy d/a, en losambientes industriales y el tipo de programación #ue incorporan,recibe el nombre de 3gestual3.

7/17/2019 Anatomia Del Robot
http://slidepdf.com/reader/full/anatomia-del-robot-568e9a17b3f82 7/9
Robots con control por *omputador
!on manipuladores o sistemasmecánicos multifuncionales,
controlados por un computador,#ue habitualmente suele ser unmicroordenador.En este tipo de robots, elprogramador no necesita mover
realmente el elemento de lama#uina, cuando la prepara pararealizar un traba(o.
El control por computador dispone de un lengua(e espec/fico,
compuesto por varias instrucciones adaptadas al robot, con las#ue se puede confeccionar un programa de aplicaciónutilizando solo el terminal del computador, no el brazo. + estaprogramación se le denomina te0tual y se crea sin laintervención del manipulador.

7/17/2019 Anatomia Del Robot
http://slidepdf.com/reader/full/anatomia-del-robot-568e9a17b3f82 8/9
Robots inteligentes !on similares a los del grupoanterior, pero, además, soncapaces de relacionarse con el
mundo #ue les rodea a trav4s desensores y tomar decisiones entiempo real auto programable".e momento, son muy pococonocidos en el mercado y se
encuentran en fase e0perimental,en la #ue se esfuerzan losgrupos investigadores porpotenciarles y hacerles másefectivos, al mismo tiempo #uemás ase#uibles.
2a visión artificial, el sonido de má#uina y la inteligencia artificial, son lasciencias #ue más están estudiando para su aplicación en los robotsinteligentes.
7/17/2019 Anatomia Del Robot
http://slidepdf.com/reader/full/anatomia-del-robot-568e9a17b3f82 9/9
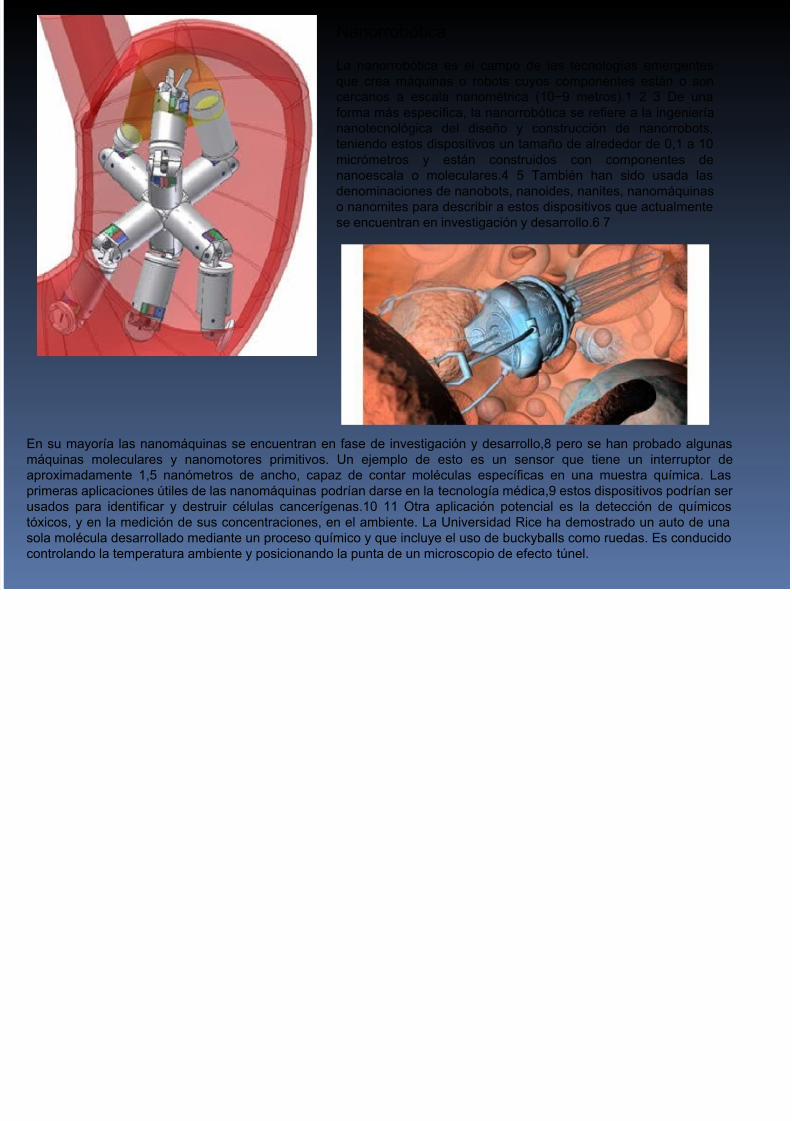
5anorrobótica
2a nanorrobótica es el campo de las tecnolog/as emergentes#ue crea má#uinas o robots cuyos componentes están o soncercanos a escala nanom4trica 6789 metros".6 : ; e unaforma más espec/fica, la nanorrobótica se refiere a la ingenier/ananotecnológica del dise1o y construcción de nanorrobots,teniendo estos dispositivos un tama1o de alrededor de 7,6 a 67micrómetros y están construidos con componentes denanoescala o moleculares.< = ambi4n han sido usada lasdenominaciones de nanobots, nanoides, nanites, nanomá#uinaso nanomites para describir a estos dispositivos #ue actualmentese encuentran en investigación y desarrollo.> ?
En su mayor/a las nanomá#uinas se encuentran en fase de investigación y desarrollo,@ pero se han probado algunasmá#uinas moleculares y nanomotores primitivos. Un e(emplo de esto es un sensor #ue tiene un interruptor deapro0imadamente 6,= nanómetros de ancho, capaz de contar mol4culas espec/ficas en una muestra #u/mica. 2asprimeras aplicaciones útiles de las nanomá#uinas podr/an darse en la tecnolog/a m4dica,9 estos dispositivos podr/an serusados para identificar y destruir c4lulas cancer/genas.67 66 Otra aplicación potencial es la detección de #u/micostó0icos, y en la medición de sus concentraciones, en el ambiente. 2a Universidad 'ice ha demostrado un auto de unasola mol4cula desarrollado mediante un proceso #u/mico y #ue incluye el uso de bucAyballs como ruedas. Es conducido
controlando la temperatura ambiente y posicionando la punta de un microscopio de efecto túnel.