Análise da Plataforma de Stewart Acionada Por Cabos Para ...
191
MINISTÉRIO DA DEFESA EXÉRCITO BRASILEIRO DEPARTAMENTO DE CIÊNCIA E TECNOLOGIA INSTITUTO MILITAR DE ENGENHARIA CURSO DE MESTRADO EM ENGENHARIA MECÂNICA 1º Ten CÍCERO DOS SANTOS MENDES LIMA RIBEIRO ANÁLISE DA PLATAFORMA DE STEWART ACIONADA POR CABOS PARA GRANDES ESPAÇOS DE TRABALHO Rio de Janeiro 2010
Transcript of Análise da Plataforma de Stewart Acionada Por Cabos Para ...
-
MINISTRIO DA DEFESA
EXRCITO BRASILEIRO
DEPARTAMENTO DE CINCIA E TECNOLOGIA
INSTITUTO MILITAR DE ENGENHARIA
CURSO DE MESTRADO EM ENGENHARIA MECNICA
1 Ten CCERO DOS SANTOS MENDES LIMA RIBEIRO
ANLISE DA PLATAFORMA DE STEWART ACIONADA POR
CABOS PARA GRANDES ESPAOS DE TRABALHO
Rio de Janeiro
2010
-
INSTITUTO MILITAR DE ENGENHARIA
1 Ten CCERO DOS SANTOS MENDES LIMA RIBEIRO
ANLISE DA PLATAFORMA DE STEWART ACIONADA POR CABOS
PARA GRANDES ESPAOS DE TRABALHO
Dissertao de Mestrado apresentada ao Curso de
Mestrado em Engenharia Mecnica do Instituto Militar de
Engenharia, como requisito parcial para a obteno do
ttulo de Mestre em Cincias em Engenharia Mecnica
Orientador: Maj Jorge Audrin Morgado de Gois Dr. Ing
Rio de Janeiro
2010
-
C2010
INSTITUTO MILITAR DE ENGENHARIA
Praa General Tibrcio, 80 Praia Vermelha
Rio de Janeiro, RJ CEP 22290-270
Este exemplar de propriedade do Instituto Militar de Engenharia, que poder inclui-lo em
sua base de dados, armazenar em computador, microfilmar ou adotar qualquer forma de
arquivamento.
permitida a meno, reproduo parcial ou integral e a transmisso entre bibliotecas
deste trabalho, sem modificao de seu texto, em qualquer meio que esteja ou venha a ser
fixado, para pesquisa acadmica, comentrios e citaes, desde que sem finalidade comercial
e que seja feita a referncia bibliogrfica completa.
Os conceitos expressos neste trabalho so de responsabilidade dos autores e de seus
orientadores.
620.1123Ribeiro,CcerodosSantosMendesLimaR484 AnlisedaplataformadeStewartacionadaporcabosparagrandesespaosde
trabalho/ CcerodosSantosMendesLimaRibeiro.RiodeJaneiro:InstitutoMilitardeEngenharia,2010.
190f.:il.,graf.,tab
Dissertao(mestrado)InstitutoMilitardeEngenharia,2010.
1. Engenharia Mecnica Tese, Dissertao 2. Plataforma de Stewart. 3.CabosemCatenria.I.Ttulo.II.InstitutoMilitardeEngenharia.
CDD620.1123
2
-
INSTITUTO MILITAR DE ENGENHARIA
1 Ten CCERO DOS SANTOS MENDES LIMA RIBEIRO
ANLISE DA PLATAFORMA DE STEWART ACIONADA POR CABOS
PARA GRANDES ESPAOS DE TRABALHO
Dissertao de Mestrado apresentada ao Curso de Mestrado em Engenharia Mecnica do
Instituto Militar de Engenharia, como requisito parcial para a obteno do ttulo de Mestre em
Cincias em Engenharia Mecnica.
Orientador: Maj Jorge Audrin Morgado de Gois Dr. Ing
Aprovada em 08 de fevereiro de 2010 pela seguinte Banca Examinadora:
__________________________________________________________________
Maj Jorge Audrin Morgado de Gois Dr. Ing. do IME Presidente
__________________________________________________________________
Prof. Max Suell Dutra Dr. -Ing. da UFRJ
__________________________________________________________________
Prof. Luciano Luporini Menegaldo - D.C. do IME
__________________________________________________________________
Prof. Fernando Ribeiro da Silva - D.C. do IME
Rio de Janeiro
2010
3
-
Quero dedicar este trabalho a minha famlia como
forma de compensao pela minha falta durante estes dois
anos, por ter perdido momentos preciosos que no voltam
mais e por no t-las levado para passear quando me
pediam.
4
-
AGRADECIMENTOS
Em primeiro lugar a DEUS, que me concede o simples dom de respirar, acordar e ter
metas todos os dias. Logo em seguida, quero agradecer a minha esposa e minha filha por
terem se mantido firmes durante estes dois anos, por todo o tempo em que fui muito chato.
Agradeo aos meus pais que sempre me incentivaram a estudar e se desdobraram em alguns
momentos para manterem o alto padro educacional que tive.
Agradeo ao Exrcito Brasileiro que financiou minha graduao e mestrado, ambos em
tempo integral, que me deu a oportunidade de conhecer trs regies do Brasil e por mais
incrvel que parea por ter me tirado do Rio de Janeiro, pois como todo bom carioca (carioca
de criao, sou nascido em Niteri) nunca sairia do Rio por vontade prpria.
Ao Maj Estarch, ao Ten Cel Mendona e ao Maj Ribeiro e todos seus Sargentos
auxiliares, todos l de Campo Grande, que me ajudaram naquela tarde de quinta para no
perder o prazo de envio do requerimento de mestrado. A Cap Jonara pela simpatia com que
atendia meus telefonemas quase que semanalmente.
Ao Instituto Militar de Engenharia pela excelente escola que e por seus integrantes,
quase que na sua totalidade muito prestativos e aptos a ensinar seja o que for. Em especial ao
Maj Audrin, Orientador, que ao longo destes dois anos, na medida em que lhe era possvel
nunca me negou auxlio e se mostra paciente com minhas limitaes. Aos professores
Luciano, Fernando, Cel Arnaldo e Prof. Max Suell da UFRJ pela pacincia, interesse e
entusiasmo com que compe a banca examinadora.
Ao pessoal do LPM: Back, Fernando, Mineiro, Rodrigo, Chico, Ten Cel Servilha, Cmt
Diogo, Ten Cel Zola (da Angola), Marcos e Vivian (A galera da dura); a galera do mestrado de
outros cursos como: Humberto, Amorim, Alaluna, Ingrid e por ai vai, ao Pereira que nos
deixou em busca de novos mundos; ao Teixeira desde a graduao; ao pessoal da mole:
Renan, Oberdan, Bruno, Maj Eduardo, Leandro, Rmulo, Luciana e Fabrcio que no
concluiram conosco; e outros que no lembro o nome agora.
Ao pessoal do Corpo de Alunos, em especial a Cris e ao Lyra, que sempre estiveram
dispostos a me ajudar a resolver meus problemas
E por ltimo, mas no menos importante ao pessoal de Braslia por ter me ajudado na
classificao aps o curso.
5
-
Vai s, age e s forte
(2 Cronicas 25:8)
6
-
SUMRIO
LISTA DE ILUSTRAES.....................................................................................................10
LISTA DE TABELAS...............................................................................................................18
LISTA DE ABREVIATURAS E SMBOLOS..........................................................................19
LISTA DE SIGLAS...................................................................................................................22
1 INTRODUO.........................................................................................................25
1.1 Reviso bibliogrfica..................................................................................................27
1.2 Objetivo ...................................................................................................................28
1.3 Desenvolvimento do trabalho.....................................................................................29
2 FUNDAMENTAO TERICA...........................................................................31
2.1 Definies...................................................................................................................34
2.2 Classificao de TBPM...............................................................................................37
2.2.1 Quanto ao grau de redundncia...................................................................................37
2.2.2 Quanto aos graus de liberdade....................................................................................41
3 MODELO MATEMTICO.....................................................................................43
3.1 Equilbrio de foras e consideraes adicionais.........................................................45
3.2 Cinemtica inversa......................................................................................................47
3.3 Dinmica inversa........................................................................................................50
4 ANLISE DO ESPAO DE TRABALHO............................................................53
4.1 Singularidades.............................................................................................................56
4.2 Rigidez do sistema......................................................................................................58
4.3 Mtodo de determinao do espao de trabalho controlvel para manipuladores com
cabos de massa nula....................................................................................................60
4.4 Determinao de foras pelo mtodo do baricentro...................................................64
5 ESTUDO DE CASO DE MANIPULADORES DE CABOS COM MASSA
NULA .....................................................................................................................66
5.1 Soluo homognea....................................................................................................66
7
-
5.2 Soluo no-homognea.............................................................................................70
5.3 Espao de trabalho com respeito s tenses...............................................................73
5.3.1 Espao de trabalho com respeito s tenses com soluo homognea.......................75
5.3.2 Espao de trabalho com respeito s tenses com soluo no-homognea................80
6 MODELO DO MANIPULADOR COM CABOS DE MASSA NO-NULA......86
6.1 Caso 1: Plataforma pontual 3m2T0R..........................................................................87
6.2 Caso 2: Plataforma pontual 4m3T0R..........................................................................93
6.3 Caso 3: Plataforma em barra 4m2T1R........................................................................95
6.4 Caso 4: Plataforma em placa plana 8m3T3R..............................................................97
6.5 mtodo alternativo da soluo baseada em componentes de foras horizontais para
casos em que existem cabos na vertical....................................................................101
6.6 etapas do mtodo de soluo do problema no-linear..............................................104
6.7 resultados esperados..................................................................................................105
7 DADOS DE PROJETO E ESPECIFICAO DO CABO DE AO.................107
7.1 Definio da regio de ancoragem............................................................................107
7.2 Definio da plataforma e especificao do cabo de ao.........................................109
7.3 Dados de entrada do problema..................................................................................112
7.4 Validao do espao de trabalho...............................................................................114
7.4.1 Consideraes sobre o espao de trabalho obtido.....................................................116
7.5 Trajetrias.................................................................................................................124
7.5.1 Trajetria elptica com altura varivel......................................................................124
7.5.2 Trajetria ascendente helicoidal de raio varivel......................................................125
7.5.3 Trajetria parablica.................................................................................................126
8 SIMULAES E RESULTADOS OBTIDOS.....................................................129
8.1 Resultados obtidos a partir das trajetrias................................................................129
8.2 Problemas encontrados durante a obteno do modelo dinmico e anlise do espao
de trabalho.................................................................................................................139
9 TRABALHOS FUTUROS.....................................................................................140
9.1 Soluo de sistemas altamente redundantes.............................................................140
8
-
9.2 Vibrao no sistema..................................................................................................140
9.3 Sensao e percepo................................................................................................141
9.4 Considerao dos pontos de ancoragem como polias...............................................141
9.5 Implementao de um sistema de posicionamento na plataforma............................142
9.6 Analise da rigidez do sistema quanto a massa dos cabos.........................................142
10 CONCLUSES.......................................................................................................143
11 REFERENCIAS BIBLIOGRFICAS..................................................................146
12 APNDICE..............................................................................................................151
12.1 Apndice 1: Definies sobre fios e cabos em catenria .........................................152
12.1.1 Equaes gerais dos fios e cabos..............................................................................153
12.1.2 Estudo particular da catenria...................................................................................155
12.1.3 Fundamentao terica para cabos elsticos.............................................................158
12.1.4 Equaes fundamentais para grandes espaos de trabalho.................................160
12.2 Apndice 2: Demonstrao da obteno da matriz de rotao Rp(x)........................162
12.3 Apndice 3: Demonstrao da derivada da matriz de rotao Rp'(x)......................164
12.4 Apndice 4: Demonstrao de =Hb-1 . .................................................................165
12.5 Apndice 5: Aplicao da serie de taylor para obteno da configurao cinemtica
da plataforma............................................................................................................167
12.6 Apndice 6: Espaos de trabalho para manipuladores com cabos de massa nula....172
12.7 Apndice 7: Trajetrias propostas e espao de trabalho a esperado.........................175
13 ANEXO....................................................................................................................180
13.1 Anexo 1: Caracteristicas bsicas de cabos de ao....................................................181
13.2 Anexo 2: Especificao de cabo por aplicao.........................................................186
13.3 Anexo 3: Tabela de especificao do cabo CIMAF 6x25F+AACI..........................187
13.4 Anexo 4: Ficha tcnica do EC-120 COLIBRI da Helibrs.......................................188
13.5 anexo 5: Definies das matrizes de massa e generalizada de coriolis apresentada por
(FANG, 2005)...........................................................................................................189
9
-
LISTA DE ILUSTRAES
FIG. 1.1 Prottipo do SEGESTA (BRUCKMAN et al, 2008).............................................26
FIG. 1.2 Esquema plano de um manipulador serial acionado por cabos(OU, 1994)...........27
FIG. 2.1 Aplicaes de manipuladores paralelos baseados em tendes para grandes
dimenses...............................................................................................................31
FIG. 2.2 Rob FALCON (KAWAMURA et al, 1995)..........................................................32
FIG. 2.3 Definio dos elementos do manipulador..............................................................36
FIG. 2.4 Posicionamento da plataforma exteriormente ao polgono de ancoragem.............39
FIG. 2.5 Manipuladores CPRM segundo a classificao por Nr de graus de liberdade
(VERHOEVEN, 2004)...........................................................................................42
FIG. 3.1 Modelo geral de uma plataforma acionada por cabos (VERHOEVEN, 1998)......44
FIG. 3.2 Tcnicas para se evitar colises entre cabos (VERHOEVEN, 2004)....................45
FIG. 3.3 Foras aplicadas sobre a plataforma.......................................................................46
FIG. 4.1 Espao de trabalho definido por (FANG, 2005) para o SEGESTA
(BRUCKMANN et al, 2008).................................................................................56
FIG. 4.2 Singularidade do Tipo I ou Sub-mobilidade (VERHOEVEN, 2004)....................57
10
-
FIG. 4.3 Singularidade do Tipo II ou Sobre-Mobilidade (VERHOEVEN, 2004)...............57
FIG. 4.4 Rigidez para manipuladores 2T0R (HILLER et al ,2005).....................................60
FIG. 4.5 Manipulador 3m1T0R (VERHOEVEN, 2004)......................................................63
FIG. 4.6 Regio Vivel e e Transformao Linear = N(AT) . .
(BRUCKMAN et al, 2008)....................................................................................63
FIG. 5.1 Manipulador 3m2T0R............................................................................................66
FIG. 5.2 Curvas de tenso do manipulador 3m2T0R em funo da Regio Vivel.............68
FIG. 5.3 Manipulador 4m2T0R............................................................................................68
FIG. 5.4 Regio vivel do caso 4m2T0R.............................................................................69
FIG. 5.5 Tenso no cabo 1 do Manipulador RRPM 4m2T0R, obtida em funo do domnio
da Regio Vivel....................................................................................................70
FIG. 5.6 Evoluo da regio vivel do caso 4m2T0R no-homogneo em funo da massa
da plataforma..........................................................................................................72
FIG. 5.7 Espao de Trabalho com respeito as tenses fmin=1,0N e fmax=5,0N para o
manipulador RRPM 4m2T0R................................................................................73
FIG. 5.8 Espao de Trabalho com Respeito s Tenses, de uma manipulador CRPM
homogneo, para vrios valores de kmax..................................................................75
11
-
FIG. 5.9 Mtodo bsico de determinao do espao de trabalho.........................................76
FIG. 5.10 Espao de trabalho com respeito s tenses para o manipulador
CRPM 3m2T0R.....................................................................................................77
FIG. 5.11 Espao de trabalho com respeito s tenses para o manipulador
RRPM 4m2T0R.....................................................................................................78
FIG. 5.12 Espao de trabalho com respeito s tenses para o manipulador
RRPM 6m2T0R.....................................................................................................79
FIG. 5.13 Espaos de trabalho para manipuladores 3m2T0R com diferentes massas...........81
FIG. 5.14 Espao de trabalho para 3m2T0R com fmin=1,0N e fmax=2,5N...............................82
FIG. 5.15 Espao de trabalho para 3m2T0R com fmin=2,0N e fmax=5,0N...............................82
FIG. 5.16 Espao de trabalho para 4m2T0R com fmin=1,0N e fmax=5,0N...............................83
FIG. 5.17 Espao de trabalho para 4m2T0R com fmin=1,0N e fmax=2,5N...............................83
FIG. 5.18 Espao de trabalho para 4m2T0R com fmin=2,0N e fmax=5,0N...............................84
FIG. 6.1 Modelo do manipulador 3m2T0R, com cabos em catenria..................................88
FIG. 6.2 Posies possveis de cabos nos pontos de fixao...............................................90
12
-
FIG. 6.3 Modelo do manipulador 4m3T0R, com cabos em catenria..................................93
FIG. 6.4 Modelo do manipulador 4m2T1R, com cabos em catenria..................................95
FIG. 6.5 Modelo do manipulador 8m3T3R, com cabos em catenria..................................98
FIG. 6.6 Vetor v1 no plano vertical que contem a catenria.................................................99
FIG. 6.7 Esquema de determinao do Espao de Trabalho Controlvel no-linear........104
FIG. 6.8 Representao dos vetores unitrios em um manipulador CRPM 2T0R.............105
FIG. 7.1 Duplo hangar de Orly de Eugne Freyssine, 1923 (PORTO, 2009)....................107
FIG. 7.2 Foto do Ptio Mal Mascarenhas de Moraes (Arquivo pessoal)...........................108
FIG. 7.3 Slidos de ancoragem (Esquemtico)..................................................................108
FIG. 7.4 Vistas de frente, lateral e de topo do helicptero EC-120 COLIBRI
(http://www.helibras.com.br/produtos_det.php?id=1).........................................109
FIG. 7.5 Esquema de sustentao da plataforma por um nico cabo.................................110
FIG 7.6 Espaos de Trabalho com os pontos de ancoragem e eixos coordenados............112
FIG. 7.7 Vistas do Espao B...............................................................................................115
13
-
FIG. 7.8 Vistas do Espao B (No-linear)..........................................................................115
FIG. 7.9 Foras de trao nos cabos...................................................................................116
FIG. 7.10 Vistas laterais dos espaos de trabalho para cabos de massa no-nula................118
FIG. 7.11 Vistas frontais dos espaos de trabalho para cabos de massa no-nula................118
FIG. 7.12 Vistas superiores dos espaos de trabalho para cabos de massa no-nula...........119
FIG. 7.13 Comparao entre os espaos de trabalho para o cabo C3, com CS 10 e 12.......120
FIG. 7.14 Tcnica de visualizao do espao de trabalho por cotas....................................121
FIG. 7.15 Espao de trabalho por cotas para a regio B com o cabo C3 e CS 12................122
FIG. 7.16 Trajetria elptica de altitude varivel..................................................................125
FIG. 7.17 Trajetria ascendente helicoidal de raio varivel.................................................126
FIG. 7.18 Trajetria da plataforma em vo parablico........................................................128
FIG. 8.1 Curva de foras nos cabos na trajetria elptica...................................................130
FIG. 8.2 Curvas de comprimento de cabo na trajetria elptica.........................................131
FIG. 8.3 Curvas de deformao elstica nos cabos na trajetria elptica...........................131
14
-
FIG. 8.4 Catenrias e tenses na posio inicial da trajetria elptica r=[200 0 50] .........133
FIG. 8.5 Catenrias e tenses na posio r=[72 14 40] da trajetria elptica.....................133
FIG. 8.6 Curvas de foras nos cabos para trajetria helicoidal ascendente........................134
FIG. 8.7 Curvas de deformao elstica nos cabos para trajetria helicoidal ascendente..135
FIG. 8.8 Curvas de foras nos cabos para trajetria parablica.........................................135
FIG. 8.9 Curvas de deformao elstica nos cabos para trajetria parablica...................136
FIG. 8.10 Catenrias e tenses na posio inicial da trajetria helicoidal r=[150 0 20]......137
FIG. 8.11 Catenrias e tenses na posio em r=[93 12 67]................................................137
FIG. 8.12 Catenrias e tenses na posio inicial da trajetria parablica r=[105 0 20].....138
FIG. 8.13 Catenrias e tenses em r=[128 0 77]..................................................................138
FIG. 12.1 Modelo simples de cabo em catenria..................................................................152
FIG. 12.2 Catenria sujeita ao prprio peso.........................................................................153
FIG. 12.3 Representao das foras aplicadas sobre um elemento infinitesimal de cabo....153
FIG. 12.4 Modelo de catenria fixa em dois pontos.............................................................155
15
-
FIG. 12.5 Determinao das distancias horizontal e vertical entre pontos de fixao e de
ancoragem da catenria........................................................................................156
FIG. 12.6 Modelo de cabo em catenria para determinao do espao de trabalho.............160
FIG. 12.7 Representao de rotaes tri-dimensionais na seqncia ZYX..........................162
FIG. 12.8 Representao do referencial local.......................................................................165
FIG. 12.9 Espao de trabalho linear para o Cabo C1, com CS=12 .....................................172
FIG. 12.10 Espao de trabalho linear para o Cabo C2, com CS=12......................................173
FIG. 12.11 Espao de trabalho linear para o Cabo C3, com CS=12......................................173
FIG. 12.12 Espao de trabalho linear para o Cabo C4, com CS=12......................................174
FIG. 12.13 Vistas do Espao de Trabalho A esperado............................................................175
FIG. 12.14 Trajetria da plataforma vo pairado................................................................177
FIG. 12.15 Trajetria da plataforma Decolagem parablica...............................................178
FIG. 12.16 Trajetria da plataforma Trajetria senoidal no plano 0xz................................179
FIG. 13.1 Esquema de cabo de ao e seus elementos (VERRET ,1997).............................181
16
-
FIG. 13.2 Seo transversal de cabos de ao (VERRET ,1997)...........................................182
FIG. 13.3 Tipos de toro (VERRET ,1997)........................................................................183
FIG. 13.4 Recomendaes de enrolamento no tambor segundo dimetro da polia e sentido
de toro do cabo (VERRET, 1997).....................................................................184
FIG. 13.5 Comparao entre pernas convencional e compactada (VERRET, 1997)...........184
17
-
LISTA DE TABELAS
TAB 2.1 Classificao do manipulador quanto ao numero de graus de liberdade...............41
TAB. 5.1 Valores de vivel e f(vivel) para as massas 0g, 50g e 250g no caso 3m2T0R..........71
TAB. 5.2 Valores de vivel e f(vivel ) para as massas 0g, 50g e 250g no caso 4m2T0R.........71
TAB. 6.1 Tabela de frmulas para o Caso 3T3R.................................................................100
TAB. 7.1 Dados tcnicos do EC-120 Colibri.......................................................................110
TAB. 7.2 Cargas de ruptura para especificao de cabo em funo do ngulo de inclinao
com a horizontal, para cabos CIMAF 6x25F+AACI...........................................111
TAB. 7.3 Propriedades Mecnicas dos cabos CIMAF 6X25F+AACI para os dimetros 16,0,
19,0, 22,0 e 29,0mm.............................................................................................117
TAB. 7.4 Dados de projeto e especificao do cabo de ao................................................123
TAB. 7.5 Comparao entre as caractersticas do cabo C1 (CS 12) e C3 (CS 10)..............123
TAB. 12.1 Equaes Fundamentais com Respeito a Cabos Flexveis para Grandes Espaos de
Trabalho................................................................................................................161
TAB. 13.1 Coeficientes de segurana aplicados a cabos de ao............................................185
18
-
LISTA DE ABREVIATURAS E SMBOLOS
ABREVIATURAS
a - Razo h / de um cabo em catenria
A(s) - rea da seo transversal do cabo, no comprimento s em relao ao vrtice da catenria
A+T - Psedo-inversa de Moore-Penrose da Matriz de Estrutura AT
AT - Matriz de estrutura
b - Matriz dos pontos de ancoragem
C(m,p) - Combinao de m elementos p a p
CS - Coeficiente de segurana
dC - Distncia vertical entre os pontos de fixao e ancoragem de um cabo em catenria
E - Mdulo de elasticidade do cabo
f - Vetor de foras nos cabos
f (viavel) - Vetordetensesnoscabos,obtidospelaaplicaodevivelf s - Vetorsoluodeforasobtidaapartirdomtododobaricentro
F(H) - Sistema de equaes no-lineares
fmax - Limite superior de trao no cabo
fmin - Limite inferior de trao no cabo
fp - Vetor de foras aplicadas sobre a plataforma
frup - Trao de ruptura do cabo
gC - Componente das foras de Coriolis
gE - Vetor de foras externas aplicadas sobre a plataforma
h - Vetor de fora horizontal em um cabo em catenria
Hb-1 - Matriz de transformao linear que leva as derivadas dos ngulos de Cardan para o vetor de velocidades angulares no R3
IG - Tensor de inrcia definido em RG em funo dos ngulos de rotao;
Jx - Matriz jacobiana de x(x)
K - Matriz de rigidez do sistema
l - Vetor de comprimento de cabo
19
-
lC - Distncia horizontal entre os pontos de fixao e ancoragem de um cabo em catenria
Mp - Matriz de massa
mp - Massa da plataforma;
N(AT) - Ncleo da matriz de estrutura
pL - Vetor dos pontos de fixao dos cabos na plataforma, no ref. local. RL
q - Vetor comprimento de cabo
r - Rosio do referencial local da plataforma RL em relao a RG
RC - Referencial de determinao dos parmetros da catenria no plano vertical que a contem
RG - Referencial Global
RL - Referencial Local da plataforma
Rp(x) - Matriz de rotao da plataforma em relao ao ref. global RG
T(s) - Trao no cabo em um comprimento s em relao ao vrtice da catenria
U - Matriz Direcional
Umax - Limite superior de torque nos atuadores
Umin - Limite inferior de torque nos atuadores
vi - Vetor unitrio de comprimento de cabo
w(r,) - Vetor de esforos externos aplicados sobre a plataforma na posio e orientao indicadas por r e , respectivamente.
x - Posio da plataforma
x - Velocidade da plataforma
x - Acelerao da plataforma
x1 - Posio do ponto de fixao de um cabo em catenria no ref. RC
x2 - Posio do ponto de ancoragem de um cabo em catenria no ref. RC
L - Deformao elstica do cabo
S - Comprimento de cabo entre os pontos x1 e x2
20
-
SMBOLOS
Peso por unidade de comprimento de um cabo em catenria
- Menor ngulo que o plano vertical que contem a catenria faz com a direo longitudinal do slido de ancoragem.
1 - ngulo que a catenria faz com a horizontal no ponto de fixao
2 - ngulo que a catenria faz com a horizontal no ponto de ancoragem
f ih j
- Derivada parcial de fi segundo hj para o clculo da matriz Jacobiana de soluo do sistema no-linear
- ngulo de rotao da plataforma em torno do eixo Z
- ngulo de rotao da plataforma em torno do eixo Y - ngulo de rotao da plataforma em torno do eixo X
- Vetor velocidade angular
x(x) - Funo vetorial comprimento de cabo
d - Deformaoaxialespecificadeumcaboemcatenria
C - Hipercubo m-dimensional dos limites de fora nos cabos
S - Hiperplano r-dimensional das distribuies de fora
- Regio Vivel delimitada pelos (s) no Rr
- Ponto soluo da regio vivel em Rr
s - obtidopelomtododobaricentro,referenteasoluosegura
vivel - limitesdaregiovivel
- Imagem da regio vivel no hipercubo de foras
- Orientao da plataforma, representada pelo referencial RL, em relao a RG
p - Vetor de torques aplicados sobre a plataforma
21
-
LISTA DE SIGLAS
1T Movimento com 1 grau de liberdade translacional
2T Movimento com 2 graus de liberdade translacionais
2T1R Movimento com 2 graus de liberdade translacionais e 1 rotacional
3T Movimento com 3 graus de liberdade translacionais
3T2R Movimento com 3 graus de liberdade translacionais e 2 rotacionais
3T3R Movimento com 3 graus de liberdade translacionais e 3 rotacionais
8M3T3R Manipulador comm 8 cabos, cuja plataforma se move como 3T3R.
CKRM Completely Kinematic Restrained Manipulators (Manipulador com restries cinemticas completas)
CRPM Completely Restrict Positioning Mechanism (Mecanismo de posicionamento completamente restrito)
IKRM Incompletely Kinematic Restrained Manipulators (Manipulador com restries cinemticas incompletas)
IME Instituto Militar de Engenharia
IRPM Incompletely Restrict Positioning Mechanism (Mecanismo de posicionamento incompletamente restrito)
LPM Labortorio de Projetos Mecnicos
R.A. Razo de Aspceto
RAMP Redundantly Actuated Manipulators (Manipulador com restries cinemticas redundantes)
RRPM Redundantely Restrict Positioning Mechanism (Mecanismo de posicionamento redundantemente restrito)
SE-4 Seo de Ensino 4 / Departamento de Engenharia Mecnica e de Materiais
SEGESTA SEilGEtribene Systeme in Theorie und Anwendung (Sistemas atuados por cabos em teoria e aplicao)
TBPM Tendon-base paralell manipulator (Manipulador paralelo acionado por cabos)
22
-
RESUMO
Manipuladores paralelos atuados por cabos de massa desprezvel, constituem-se em amplo material de pesquisa. No entanto, para que um cabo de massa no desprezvel seja utilizado em um grande espao de trabalho, devem ser feitas as consideraes necessrias formao de catenrias nestes cabos.
Conhecendo-se a soluo para manipuladores acionados por cabos de massa nula, busca-se a soluo do problema gerado pela aplicao de massa nos cabos pelo mtodo de Newton, e obtm-se a soluo de foras para dada configurao cinemtica e dinmica aplicada sobre a plataforma, por meio de um sistema de equaes em funo de suas foras horizontais. Caso o sistema possua soluo na posio e esforos analisados, diz-se que este ponto pertence ao espao de trabalho do manipulador e so apresentados todos os parmetros que determinam as catenrias do sistema, bem como sua configurao cinemtica.
Analisando-se o problema em diversos casos, pode-se verificar que o espao de trabalho mais reduzido e se deforma na direo de aplicao das foras, em relao ao espao de trabalho para cabos de massa nula. Como trabalhos futuros propem-se o estudo da rigidez e da vibrao do sistema e a aplicao de sistema de controle para motores de corrente alternada, por serem mais robustos e de menor custo.
23
-
ABSTRACT
Tendon based parallel manipulators with massless wires are widely studied. However, for real wires used in a extense workspace, some considerations should be made.
From the solution for massless cable manipulators, the problem generated by the application of the cable mass is solved by Newton's method. The tensions are obtained for a kinematic and dynamic configuration applied to the platform from the component of horizontal force. If the system has solution for this position and efforts, this point will belong to the workspace and the catenary parameters are determined.
Analyzing the problem in several cases, one can verify that the workspace is smaller than workspace for massless wires and deformed in the direction of application of forces. As future work are proposed to study the stiffness and vibration of the system, as well the application of a control system based AC motors.
24
-
1 INTRODUO
Por definio um manipulador paralelo consiste de uma plataforma ou ferramenta
ligada a base por cadeias cinemticas abertas e independentes. De maneira geral,
comparando-os com manipuladores antropomrficos em srie, ambos com atuadores rgidos,
um manipulador paralelo possuir as seguintes caractersticas:
a) boa capacidade de posicionamento;
b) elevada capacidade de carga, pela sustentao cooperativa de todos os atuadores;
c) grande rigidez estrutural, dada a caracterstica acima;
d) baixa inrcia, devido a distribuio de massas; e,
e) reduzido espao de trabalho, devido ao comprimento comercial dos atuadores, e
a estes terem de se mover em conjunto em torno da posio desejada.
(STEWART, 1965) props uma estrutura paralela com 6 graus de liberdade e atuadores
lineares rgidos a partir de uma estrutura conhecida como plataforma de Gough desde 1947 e
esta nova estrutura ficou conhecida como Plataforma de Stewart1. No entanto a Plataforma de
Stewart tradicional apresentava a desvantagem de no poder se mover alm do comprimento
permitido por seus atuadores.
Visando eliminar o problema do curto espao de trabalho, limitado pelas juntas
cinemticas do mecanismo, foi proposta uma plataforma mvel sustentada por cabos. Esta
concepo ficou conhecida como manipulador paralelo baseado em tendes ou atuado por
cabos.
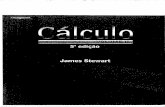
A FIG. 1.1 apresenta o SEGESTA2, um manipulador paralelo atuado por sete cabos e que
se move nos seis graus de liberdade.
1 A Plataforma de Stewart constitui-se no manipulador paralelo mais conhecido no meio no cientifico
2 SEGESTA - Seilgetriebene Stewart-Plattformen in Theorie und Anwendung. Em portugus: Plataforma de Stewart atuada por cabos para teoria e aplicao
25
-
FIG. 1.1- Prottipo do SEGESTA (BRUCKMAN et al, 2008)
Ao contrrio do SEGESTA, caso um manipulador paralelo acionado por cabos possua
cabos longos, seu espao de trabalho controlvel pode ser ampliado o quanto se deseje, desde
que quesitos como sustentabilidade e controlabilidade da plataforma sejam atendidos.
O interesse em manipuladores para grandes espaos reside na possibilidade de aplicao
em simuladores de vo de aeronaves, em especial de aeronaves de asas rotativas. Em amplos
espaos, a movimentao da plataforma representando uma aeronave tripulada poder levar o
piloto a experimentar a sensao de voar e realizar manobras e no somente a ter essa
percepo a partir de equipamentos de realidade virtual.
Desta forma, o Exrcito Brasileiro deseja desenvolver o estudo em torno deste tipo de
manipulador pelo fato de que parte da formao prtica e da instruo de um piloto poder ser
substituda por horas de aula em simuladores gerando economia de combustvel e evitando o
desgaste da aeronave.
26
-
1.1 REVISO BIBLIOGRFICA
Verifica-se que o trabalho neste tipo de manipulador comeou nos anos 80 com a idia de
melhoramentos em guindastes. Logo evoluiu para construo naval com trabalhos de
(DAGALAKIS, 1989; ALBUS e BOSTELMANN, 1993; e ,BOSTELMANN et al, 1994),
pois verificou-se que a possibilidade de movimentao e posicionamento preciso de grandes
peas poderia viabilizar a construo modular de navios, acelerando o processo de fabricao.
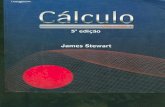
(OU, 1994) desenvolveu um trabalho sobre manipuladores seriais acionados por cabos
por meio de rotulas que atuassem como polias. Porem foi verificado que o comprimento dos
cabos varivel em funo da posio angular de cada junta do manipulador. Em (OU, 2004)
pode-se verificar o prosseguimento do trabalho que havia comeado .A FIG. 1.2 apresenta o
caso.
FIG. 1.2 Esquema plano de um manipulador serial acionado por cabos(OU, 1994)
Novamente, voltados para a aplicao submarina tem-se (UNGER, J., AND
DAGALAKIS, N. G., 1998) com o trabalho Optimum Stiffness Study for a Parallel Link
Robot Crane Under Horizontal Force3. 3 Estudo da rigidez tima de um manipulador paralelo tipo guindaste sob a ao de uma fora horizontal.
27
-
Como aplicao deste tipo de manipulador na industria espacial (BOSTELMAN et al,
1994) analisam o sistema de abertura de trem de pouso de um equipamento lunar.
(TADOKORO et al, 1999 ) desenvolveu um trabalho sobre a fixao da uma plataforma
acionada por cabos em reas atingidas por terremotos para os servios de resgate, evitando o
contato da equipe e da vtima com o solo.
(KAWAMURA et al, 2000) desenvolveu um manipulador paralelo acionado por cabos
capaz de trabalhar em altas velocidades chamado FALCON-7. (WILLIAMS, 2005) prope
um sistema de plataforma mvel acionada por cabos para a limpeza e manuteno de
aeronaves. (LAFOURCADE et al, 2002; e ZHENG, 2006) desenvolveram e analisaram
manipuladores para sustentao de modelos em tuneis de vento. H ainda uma aplicao em
sistemas de transmisso automotiva, desenvolvido por (TSAI, 1996) para o departamento do
governo norte americano.
Nas bases de patentes nacional (INPI)4, americana (USPTO)5 e europeia (EPO)6 existem
patentes sobre plataformas atuadas por cabos, sistemas de ancoragem de cabos,
posicionamento de plataformas subaquticas e sistemas de abertura de mecanismos por cabos.
1.2 OBJETIVO
O objetivo deste trabalho a obteno do modelo dinmico da Plataforma de Stewart
acionada por cabos, com 6 graus de liberdade, para aplicaes em grandes espaos de
trabalho, de forma que possa realizar deslocamentos amplos o bastante, capazes de simular o
vo de aeronaves de asa rotativa.
Como deseja-se que a plataforma atue ao longo de grandes distncias, os cabos sero
considerados elsticos e de massa no-nula, cujas especificaes tcnicas so obtidas de cabos
comerciais, considerando a simplificao de que os cabos adotem a configurao de catenria
4 www.inpi.gov.br Instituto Nacional de Propriedade Intelectual
5 www.ustpo.gov United States Patent and Trademark Office
6 www.epo.org European Patent Office
28
http://www.inpi.gov.br/http://www.epo.org/http://www.ustpo.gov/
-
esttica durante todo o percurso realizado.
Os modelos apresentados por (VERHOEVEN, 2004; FANG, 2005; OH E AGRAWAL,
2005; MIKELSONS et al, 2008) se baseiam quase que unicamente em manipuladores
completamente restritos. Segundo a prpria classificao de (VERHOEVEN, 2004) quanto ao
nmero de redundncias, este tipo de manipulador se caracteriza pelo numero de cabos ser
igual ao numero de graus de liberdade mais um, e considera cabos de massa desprezvel.
Verifica-se que a utilizao de mais cabos que o previsto, para manipuladores
completamente restritos, pode ser tanto desejvel como necessria para a manipulao da
plataforma mvel de acordo com as necessidades de projeto. A presena de cabos adicionais
atribui ao manipulador restries redundantes, conforme ser apresentado no segundo
captulo.
A necessidade de incluir cabos redundantes poder surgir caso o espao de trabalho
desejado seja amplo o suficiente para impedir que as foras dinmicas e aceleraes que esta
dissertao espera obter sejam alcanadas ao longo das trajetrias desejadas.
A possibilidade de incluso de cabos adicionais ao sistema pode ser justificada tambm
caso em que a estrutura de ancoragem no suporte a concentrao de esforos e estes devam
ser redistribudos.
Assim torna-se necessrio buscar um mtodo de soluo que independa do nmero de
cabos do manipulador, e oferea a capacidade de se variar o grau de redundncia cinemtica
do modelo final.
1.3 DESENVOLVIMENTO DO TRABALHO
Este trabalho desenvolvido utilizando os softwares livres:
Scilab-4.1.2;
Openoffice 3.1; e,
Linux sob a distribuio Ubuntu 8.04.
29
-
O Captulo 2 apresenta a fundamentao terica, as definies de manipuladores
acionados por cabos, sua classificao e consideraes quanto aos graus de redundncia e
liberdade do manipulador.
O Captulo 3 refere-se ao modelo matemtico da plataforma acionada por cabos e
descreve: a cinemtica inversa para o caso de manipuladores acionados por cabos de massas
consideradas nulas; e, o modelo dinmico da plataforma para o caso geral de m cabos e seis
graus de liberdade.
O Captulo 4 apresenta definies e ferramentas de anlise do espao de trabalho e o
mtodo de determinao da soluo segura pelo baricentro da regio vivel.
No Captulo 5 apresentado o mtodo de determinao do espao de trabalho onde
consideram-se cabos de massa nula. Caso no existam esforos externos aplicados sobre a
plataforma, tem-se a soluo homognea, caso contrrio, tem-se a soluo no-homognea.
Tambm so analisados os espaos de trabalho com respeito aos limites de tenso para ambas
as solues.
O Captulo 6 introduz o problema de determinao do espao de trabalho quando os
cabos possuem massa no-nula, apresenta as equaes de modelo para quatro casos distintos
quanto ao grau de liberdade e faz consideraes quanto aos resultados esperados na obteno
do espao de trabalho controlvel.
O Captulo 7 apresenta a especificao dos cabos de ao utilizados nas simulaes, as
dimenses da plataforma e as regies de ancoragem utilizados nas simulaes, que so
geradas no Captulo 8.
O Captulo 9 apresenta as concluses sobre o trabalho e os resultados obtidos.
O Captulo 10 sugere trabalhos futuros para a continuidade desta dissertao.
O Captulo 11 apresenta as referncias bibliogrficas utilizadas neste trabalho e nos
Captulos 12 e 13 so apresentados, respectivamente, os Apndices e Anexos.
30
-
2 FUNDAMENTAO TERICA
Manipuladores paralelos atuados por cabos so capazes de gerar velocidades e
aceleraes mais elevadas quando comparados com manipuladores que utilizem atuadores
rgidos seriais. Tal caracterstica ocorre devido a massa das partes moveis, neste caso os cabos
que sustentam o atuador final, ser consideravelmente menor. A principal vantagens deste tipo
de manipulador est no fato de ser relativamente mais leve e apresentar boa flexibilidade e
manobrabilidade, por consequncia menor inercia e rigidez.
Dentre as suas principais aplicaes industriais e comerciais, pode-se citar o
posicionamento de telescpios sobre refletores de sinais fixos e sistemas de cmeras
suspensas em estdios, onde braos robticos com atuadores rgidos no so apropriados
devido ao curto alcance til em relao as dimenses a serem observadas.
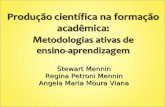
Na FIG. 2.1 so apresentadas estas aplicaes.
a) Telescpio suspenso por balo posicionado por 6 cabos sobre a superfcie refletora
(National Research Council of Canada )
b) Skycam sustentada por 3 cabos
(Skycam CF InFlight)
FIG. 2.1 Aplicaes de manipuladores paralelos baseados em tendes para grandes dimenses
Outra aplicao industrial em menor escala apresentada por (KAWAMURA et al, 1995)
e (KAWAMURA et al, 2000) de maneira detalhada com o Rob FALCON-7 para a montagem
em alta velocidade de componentes eletrnicos de pequeno peso baseados em
semicondutores.
31
-
A FIG. 2.2 ilustra de maneira esquemtica o rob FALCON-7 e seu possvel espao de
trabalho para a montagem de componentes. Observando a figura verifica-se que o
posicionamento dos cabos com pequenos ngulos de inclinao em relao a direo
longitudinal possibilita que os esforos e aceleraes sejam transmitidos de maneira mais
eficiente ao manipulador.
a) FALCON-7
b) Alcance Translacional
FIG. 2.2 Rob FALCON (KAWAMURA et al, 1995)
Aplicado a este trabalho, pode-se dizer que, de modo geral um manipulador paralelo
baseado em tendes pode ser utilizado para percorrer grandes espaos livres, limitados por
pontos fixos bem definidos e nos quais seja possvel fix-lo, e ainda no haja a atuao de
foras externas capazes de posicion-lo fora do polgono ou slido determinado pelos pontos
de ancoragem dos cabos1, no entanto existem excees a esta definio.
Como cabos so elementos de maquinas que somente geram trao sobre os componentes
em que esto fixos, a atuao redundante se torna necessria para que o posicionamento do
mecanismo seja completamente restringido (Completely Restrained Positioning Mechanism -
CRPM).
Desta forma os cabos devem ser utilizados de forma coordenada para movimentarem a
plataforma em um espao tridimensional a ser definido para cada configurao dinmica e
estrutural do manipulador. Este volume do espao, no qual a plataforma admite o equilbrio
dinmico de foras, denomina-se espao de trabalho da plataforma.
A distribuio de tenses deve ser considerada durante todo o movimento do sistema
1 Define-se por ponto de ancoragem, o local ou ponto considerado fixo, em relao a um referencial
32
-
atravs da trajetria desejada. Para que o posicionamento da plataforma seja realizado,
necessrio que condies previamente determinadas de pr-carga nos cabos e limites de
vibrao do sistema sejam obedecidas.
Para minimizar o consumo de energia do sistema, uma distribuio tima de tenses
requerida de acordo com as condies cinemticas e dinmicas existentes. Esta distribuio
apresentada por (BRUCKMANN et al, 2006) e (MIKELSONS et al, 2008)
Em (FANG et al, 2004), Motion Control of a Tendon-Based Parallel Manipulator Using
Optimal Tension Distribution, trata-se do problema da distribuio tima de tenses nos cabos
como forma de reduzir os esforos envolvidos e aumentar a eficincia energtica do sistema.
(VERHOEVEN, 2004) em Analysis of the Workspace of Tendon-based Stewart Platforms
apresenta diversas configuraes de plataformas sustentadas por cabos, compara
manipuladores paralelos a manipuladores seriais em diversas aplicaes e apresenta uma
relao entre a configuraes de cabos com os graus de liberdade da plataforma. Neste
trabalho tambm so analisadas as regies de singularidade do espao de trabalho.
(FANG, 2005) fornece uma referncia completa em seu trabalho intitulado Design,
Modeling and Motion of Tendon-Based Parallel Manipulators, voltada para manipuladores
completamente restritos. Este trabalho apresenta os modelos cinemtico e dinmico de uma
plataforma com sete cabos e seis graus de liberdade, com ambos os modelos baseados em
ngulos de cardan. Considera-se que a plataforma rgida e que os cabos so elsticos
(deformam-se longitudinalmente) e sem massa.
O desenvolvimento deste trabalho se dar basicamente em trs fases:
modelo com cabos inelsticos2 e sem massa.
modelo com cabos elsticos3 e sem massa.
modelo com cabos elsticos e com massa no-nula.
Por fim a contribuio deste trabalho ser a obteno de um modelo dinmico com seis
graus de liberdade para manipuladores paralelos acionados por cabos classificados como
completamente restritos e redundantemente restritos, este ltimo independendo do nmero de
2 A simplificao de cabo inelstico (e sem massa) indica que o cabo se mantem permanentemente retilneo, ligando os pontos de ancoragem e fixao da plataforma, e que se comprimento no varia pela ao de esforos.
3 Uma das simplificaes adotadas neste trabalho a ausncia de vibrao do cabo. A elasticidade considerada em um cabo atuando sobre a plataforma indica somente que este se deforma longitudinalmente variando seu comprimento e consequentemente a posio da plataforma.
33
-
cabos, e em ambos os casos adota-se a configurao de catenria esttica para cada cabo
empregado.
feita ainda a considerao de que as classificaes acima so obedecidas, ou seja, de
que o manipulador em nenhum momento apresente configurao incompletamente restrita
devido a ao de foras externas.
2.1 DEFINIES
Primeiramente, em todos os casos analisados utilizam-se m para nmero de cabos e n
para nmero de graus de liberdade da plataforma.
So definidos como pontos de fixao os pontos da plataforma onde os cabos so
fixados. Estes pontos so representados por vetores constantes no referencial local.
conveniente definir que o referencial local padro utilizado em todas as equaes centroidal
com os eixos 0x e 0y, respectivamente, paralelo e transversal a maior dimenso da plataforma,
e que caso isso no ocorra, tal fato ser mencionado.
Pontos de ancoragem so os pontos de ligao dos cabos com a estrutura de
sustentao do manipulador. Neste trabalho, todos os pontos de ancoragem so considerados
fixos (constantes) e pontuais devido a ordem de grandeza da variao da localizao destes
pontos em relao ao volume do espao de trabalho ser desprezvel. Por se tratar de grandes
espaos de trabalho, a variabilidade da posio do ponto de ancoragem no uma condio de
existncia para este tipo de manipulador.
(BRUCKMANN et al, 2008) apresentam o equacionamento para cabos ligados base por
polias acopladas a peas mveis nas regies de ancoragem. Desta forma, as polias por onde os
cabos passam esto sempre voltadas na direo de seu respectivo ponto de fixao, no
entanto, de acordo com a posio da plataforma e variando o ngulo do cabo com a horizontal
na regio de ancoragem, a posio do ponto de ancoragem alterada.
A modelagem de pontos de ancoragem com polias no ser adotada neste trabalho,
devido a dimenso da polia ser consideravelmente menor que o espao de trabalho gerado.
34
-
Desta forma, pode-se aproximar a posio do ponto de ancoragem para um ponto fixo.
Um exemplo de manipuladores acionados por cabos com pontos de ancoragem moveis
ocorreria no caso de atuadores sobre trilhos, contudo a utilizao deste tipo de atuador, dadas
as caractersticas de projeto, poderia gerar custos proibitivos.
Definem-se como superiores os cabos que, em determinada posio e orientao da
plataforma possuam o ponto de ancoragem superior ao de fixao e como cabos inferiores
os que se encontrem em situao oposta. A denominao de cabos superiores e inferiores pode
ser definida ainda em relao a mdia dos pontos de ancoragem.
Da mesma forma, polgono ou slido de ancoragem a figura formada por todos os
pontos de ancoragem do manipulador. Verifica-se que para a plataforma ser plenamente
utilizada, com todos seus graus de liberdade controlveis, desejvel que sua posio esteja
sempre no interior do polgono ou slido de ancoragem, conforme o caso.
A utilizao do manipulador de maneira eficiente, relaciona-se a sua controlabilidade nos
graus de liberdade de interesse. Para que isso ocorra, necessrio identificar as regies do
espao de trabalho nas quais a plataforma possa exercer esforos e movimentar-se de maneira
controlvel. A determinao e conhecimento destas regies est relacionada a geometria do
slido de ancoragem.
Desta forma, chama-se Espao de Trabalho ao conjunto destas posies. Em
(VERHOEVEN et al, 1998; VERHOEVEN, 2004; e FANG, 2005) so verificadas quatro
definies distintas para espao de trabalho, s quais sero apresentadas no captulo quatro, no
entanto esta dissertao referir-se-a sempre ao Espao de Trabalho Controlvel do
manipulador.
(VERHOEVEN, 2004) define genericamente manipuladores como sistemas mecnicos
capazes de transformar m variveis l1, . . ,lm, neste caso os comprimentos dos m cabos, e
traes f1, . . ,fm com respeito aos atuadores em n variveis de posio x1, . . ,xn e de esforos
aplicados sobre o atuador final w1, . . ,wn , desde que n no seja maior do que seis,
representando o numero de graus de liberdade controlveis do sistema. Utilizando a mesma
definio dada acima, as m variveis de comprimento e trao nos cabos so definidas como
Variveis de Junta e as n variveis de posio e esforos sobre a plataforma como
Variveis do Atuador.
(OU, 1994) caracteriza variveis de junta e atuador final (ou plataforma) como espaos
vetoriais distintos, respectivamente contidos em Rm e Rn, onde as variveis de junta so
35
-
fornecidas ao sistema para a obteno de n variveis do atuador, segundo a cinemtica e
dinmica direta do manipulador.
Dadas as definies de (VERHOEVEN, 2004; e, OU, 1994) possvel definir a Matriz
de Estrutura4 do problema como o transformador linear que relaciona as foras no atuadores
com respeito s juntas, contidas no espao vetorial Rn, com os esforos aplicados sobre a
plataforma ou atuador final, contidos no espao vetorial Rm.
A FIG. 2.3 apresenta esquematicamente um manipulador com m=8 cabos e pontos de
ancoragem, quatro pontos de fixao e n=6 graus de liberdade controlveis.
FIG. 2.3 Definio dos elementos do manipulador
As variveis de juntas so os comprimentos e foras nos cabos e as variveis do atuador a
posio e esforos sobre a plataforma, ou que esta exera. O slido de ancoragem dado por
um prisma reto de seo trapezoidal.
Os Captulos 4 e 6 apresentam os mtodos matemticos para a soluo do problema de
determinao do espao de trabalho. O Captulo 4 demonstra que a determinao do espao
de trabalho para manipuladores com cabos de massa nula se d pela soluo de sistemas
lineares baseados nas Equaes Bsicas de Soluo do Sistema. Por este motivo, este trabalho
refere-se frequentemente a este caso como caso ou sistema linear.
4 A Matriz de Estrutura AT o ente matemtico que relaciona as traes nos cabos com as foras generalizadas aplicadas sobre a plataforma atravs da EQ 3.6: AT f + w = 0, que uma das Equaes Bsicas de Soluo do Sistema. A teoria e equacionamento a respeito da Matriz de Estrutura so apresentados no captulo 3.
36
-
Dando continuidade, o Captulo 6 apresenta e demonstra o mtodo de obteno das foras
nos cabos e de determinao do espao de trabalho de manipuladores com cabos de massa
no-nula, o que ocorre por meio da soluo de um sistema de equaes no-linear. Por
analogia, a obteno do espao de trabalho para este caso dita no-linear ou como problema
no linear.
2.2 CLASSIFICAO DE TBPM
Existem duas classificaes bsicas e independentes entre si, para manipuladores
paralelos acionados por cabos, que so utilizadas neste trabalho:
1. Quanto ao grau de redundncia do manipulador;
2. Quanto aos graus de liberdade da plataforma.
2.2.1 QUANTO AO GRAU DE REDUNDNCIA
(MING E HIGUCHI, 1994a) classificam os manipuladores paralelos acionados por cabos
de acordo com a relao entre m e n como:
a) mn - IRPM (Incompletely Restrained Positioning Mechanisms): A posio da
plataforma no pode ser definida somente por equaes de restries cinemticas
unilaterais, e pelo menos uma equao dinmica necessria para definir sua
posio. Neste caso, existiro coordenadas generalizadas dependentes da posio e
movimentao da plataforma; e,
b) mn+1 - CPRM (Completely Restrained Positioning Mechanisms): A posio
da plataforma completamente definida por equaes de restrio cinemtica
unilaterais, e todos os graus de liberdade do sistema so controlados de maneira
independente. o caso mais amplamente estudado.
37
-
(VERHOEVEN, 2004) utiliza a definio de (MING E HIGUCHI, 1994) para
manipuladores IRPM, contudo divide a definio de CRPM segundo as peculiaridades de seu
trabalho em CRPM e RRPM. A classificao dada por (VERHOEVEN, 2004) descrita
abaixo. Esta classificao ser utilizada ao longo deste trabalho.
a) mn - IRPM (Incompletely Restrained Positioning Mechanisms): de (MING E
HIGUCHI, 1994);
b) m=n+1 - CPRM (Completely Restrained Positioning Mechanisms): restringindo a
definio de CRPM anterior para o nmero de cabos igual ao nmero de graus de
liberdade mais um. Neste caso a posio da plataforma totalmente definida por meio
da cinemtica inversa, obtendo-se a soluo de foras por meio de um sistema de
eques de simples soluo computacional; e,
c) m>n+1 - RRPM (Redundantly Restrained Positioning Mechanisms): Neste caso
existem mais equaes de restrio do que o necessrio para a definio do problema e
deve-se encontrar uma soluo comum a todas. Quanto ao sistema fsico, este possui
mais cabos do que o necessrio para garantir a independncia de seus movimentos,
havendo a possibilidade de se desenvolverem casos de altas redundncias, elevando
consideravelmente o custo computacional para soluo do problema.
(FANG, 2005) ainda props outra classificao, de maneira similar e seguindo a definio
dada por (MING E HIGUCHI, 1994a) e (VERHOEVEN, 2004):
a) IKRM (Incompletely Kinematic Restrained Manipulators), para m
-
transformadas em IRPM de acordo com a posio da plataforma em relao aos pontos de
ancoragem, quando foras externas so necessrias para equilibrar a plataforma e tornar as m
tenses positivas.
De acordo com (VERHOEVEN, 1998) isto se deve ao fato de que: Para qualquer
referencial local da plataforma, a Matriz de Estrutura deve conter em cada linha pelo menos
um elemento negativo e um positivo.
A partir da definio acima. Pode-se dizer tambm que caso o produto dos elementos de
cada linha seja positivo e haja soluo para o problema, o manipulador se comportar como
IRPM, independente de sua classificao segundo (VERHOEVEN, 2004)
A FIG. 2.4 apresenta o caso de um manipulador plano, com m cabos (m>3) ligados ao
polgono de ancoragem (1)-(2)- . . . -(m), e dois graus de liberdade. Apesar desta configurao
ser caracterizada como RRPM, possvel verificar que em qualquer posio externa ao
polgono de ancoragem, a plataforma se comportar como pertencendo a um manipulador
IRPM. Caso no haja pelo menos um esforo externo atuando sobre a plataforma, no ser
possvel estabelecer o equilbrio esttico entre as tenses .
FIG. 2.4 Posicionamento da plataforma exteriormente ao polgono de ancoragem
Tem-se que as colunas da Matriz de Estrutura de sistemas puramente translacionais5 com
cabos inelsicos so dadas por vetores unitrios na direo de aplicao das tenses sobre a
5 Sistemas puramente translacionais so caracterizados por plataformas pontuais.
39
-
plataforma6. Matematicamente, considerando os possveis referenciais locais da plataforma,
no caso apresentado na FIG. 2.4, a Matriz de Estrutura ter dimenso [2 x m] representando as
componentes vx e vy de cada vetor. Se o produto dos elementos de cada linha for negativo,
significa que h pelo menos uma componente positiva e uma negativa nas direes locais 0x'
e 0y'. Esta uma condio necessria, mas no suficiente, para que o equilbrio dinmico da
plataforma seja obtido somente pela trao nos cabos.
Em relao a manipuladores redundantes (VERHOEVEN, 2004) apresenta trs razes
para a utilizao de sistemas RRPM que justificam seu custo computacional e principalmente
o de fabricao:
a) Inicialmente o espao de trabalho pode ser expandido consideravelmente e
singularidades observadas no sistema original podem ser eliminadas, alm de
aumentar a rigidez do sistema;
b) Atuadores de menor potncia podem ser empregados, ocorrendo a redistribuio
de cargas nos pontos de ancoragem e novas configuraes geomtricas, mais
vantajosas, podem ser alcanadas
c) Particularmente, em aplicaes onde a segurana seja primordial, como por
exemplo resgates e montagem em reas de desmoronamentos, transporte de pessoal e
cargas perigosas, o risco operacional reduzido e aumenta-se a capacidade de
emprego do sistema.
Conforme foi dito na introduo, o interesse em estudar manipuladores com cabos
redundantes reside no fato de que sete cabos, segundo a classificao CRPM para seis graus
de liberdade, podem no ser suficientes para atingir os objetivos de projeto. Um destes
objetivos o espao de trabalho, que pode ser consideravelmente restringido devido a
ausncia de pontos de ancoragem em posies chaves ou pela aplicao de esforos em
direes onde os cabos existentes sejam pouco efetivos.
6 Plataformas pontuais no exercem momento. Ver EQ 3.1 e 3.5.
40
-
2.2.2 QUANTO AOS GRAUS DE LIBERDADE
(VERHOEVEN, 2004) prope a seguinte classificao:
TAB 2.1 Classificao do manipulador quanto ao numero de graus de liberdade
Graus de liberdade Qtd G.L. Tipo de movimento
1T 1 Movimento linear do corpo
2T 2 Movimento plano do ponto
2T1R 3 Movimento plano do corpo
3T 4 Movimento espacial do ponto
3T2R 5 Movimento espacial da barra
3T3R 6 Movimento espacial do corpo
VERHOEVEN, 2004
A FIG. 2.5 apresenta exemplos de manipuladores, segundo o nmero de graus de
liberdade, para a configurao CPRM, onde o numero de cabos determinado por m=n+1,
representando a quantidade mnima de cabos para que o sistema no dependa de um esforo
externo para ser controlvel.
Os graus de liberdade so apresentados de acordo com a TAB. 2.1 e as posies dos
pontos de ancoragem representadas pelos atuadores so meramente ilustrativos.
41
-
a) 1T ou 1T0R b) 2T ou 2T0r c) 2T1R
d) 3T ou 3T0r e) 3T2R f) 3T3R
FIG. 2.5 Manipuladores CPRM segundo a classificao por Nr de graus de liberdade(VERHOEVEN, 2004)
Basicamente, este trabalho se inicia com o estudo de plataformas 2T (ou 2T0R) e 2T1R
caracterizando o caso plano. Inicialmente so estudados casos onde a massa dos cabos e da
plataforma so considerados nulos, tendo-se ento a soluo homognea. Analisado o caso
homogneo parte-se para o estudo de manipuladores com soluo no-homognea em que
somente a plataforma possui massa no-nula. Em seguida so estudados os casos 3T e 3T3R,
tambm para sistemas de soluo homogneos e no-homogneos.
Por fim analisam-se manipuladores onde a massa dos cabos e da plataforma so
relevantes. Todo equacionamento apresentado ao final deste trabalho desenvolvido para o
caso 3T3R, contudo generalista o suficiente para ser utilizado em qualquer configurao.
42
-
3 MODELO MATEMTICO
Neste captulo apresentado o modelo modelo matemtico da plataforma, segundo
(VERHOEVEN, 1998) e (OH E AGRAWAL, 2005), para manipuladores com cabos elsticos
e sem massa.
No entanto este trabalho voltado para o desenvolvimento do modelo dinmico de
manipuladores paralelos acionados por cabos elsticos e de massa no-nula.
Desta forma, a soluo do problema objetivo deste trabalho, obtida por meio de um
sistema no-linear, em funo dos parmetros que definem o cabo em catenria, dentre eles o
peso do cabo por unidade de comprimento, a trao aplicada, a distncia entre os pontos de
fixao e ancoragem, e tendo como condio inicial a soluo de foras para TBPMs
conforme descritas nos trabalhos citados. O mtodo de soluo para manipuladores com cabos
de massa no-nula ser apresentado na Seo 6.6.
Voltando a definio do problema, basicamente toda a anlise de plataformas atuadas por
cabos recai em um problema de determinao do espao de trabalho segundo:
a) Geometria da base e da plataforma;
b) Limites de foras e elasticidade dos cabos; e,
c) Foras generalizadas aplicadas plataforma.
Considerando que para dada posio e orientao desejadas, o problema possua soluo,
estes dados fornecero a distribuio de foras trativas nos cabos, e diz-se que esta posio
pertence ao Espao de Trabalho Controlvel.
Na FIG. 3.1 apresentado um caso geral de Plataforma de Stewart acionada por cabos
com os principais elementos necessrios a obteno do modelo dinmico. Todos os entes
geomtricos da plataforma esto representados nesta figura.
43
-
FIG. 3.1 - Modelo geral de uma plataforma acionada por cabos (VERHOEVEN, 1998)
Para os m cabos apresentados:
RL e RG representam, respectivamente, o referencial local, fixo a plataforma, e
global, fixo na estrutura de ancoragem;
b1 a bm representam os vetores pontos de ancoragem dos cabos na estrutura em
relao ao referencial RG;
p1 a pm representam os vetores pontos de fixao dos cabos na plataforma;
r e representam a posio e orientao de RL em relao a RG; e,
l1 a lm representam os vetores comprimento de cabo, de cada ponto de fixao a
seu respectivo ponto de ancoragem. Deve-se ter em mente que a representao
geomtrica dos cabos por meio de vetores, considera-os como retilneos, inelsticos e
de massa nula.
Levando em conta a FIG. 3.1, o desenvolvimento da base terica para o modelo
matemtico considera que:
a) Todos os cabos esto conectados a plataforma por meio de juntas esfricas ideais;
b) A plataforma e estrutura de ancoragem so corpos rgidos;
c) No h coliso entre dois ou mais cabos quaisquer, em qualquer posio do espao
de trabalho.
Em relao a ltima considerao, (VERHOEVEN, 2004) prope que: Se dois cabos
so conectados no mesmo ponto da base ou da plataforma, nunca iro colidir.
44
-
As ilustraes abaixo apresentam exemplos de configurao de manipulador tais que no
apresente auto-coliso de cabos.
a) pontos de fixao e/ou ancoragem coincidentes b) cabos em planos paralelos
FIG. 3.2 - Tcnicas para se evitar colises entre cabos (VERHOEVEN, 2004)
Na FIG. 3.2 a) ilustrado o caso de coincidncia de pontos de fixao ou ancoragem e na
FIG. 3.2 b) apresentada o caso onde os cabos esto localizados em planos paralelos e, em
princpio, a plataforma no se mova transversalmente a estes planos.
Ainda de acordo com a proposio de (VERHOEVEN, 2004), uma plataforma pontual
nunca apresentar coliso de cabos, pois todos os cabos estaro ligados ao mesmo ponto de
fixao.
3.1 EQUILBRIO DE FORAS E CONSIDERAES ADICIONAIS
Baseada na FIG. 3.1, a FIG. 3.3 apresenta o modelo geral da plataforma da Stewart
acionada por cabos onde as foras aplicadas sobre a plataforma so indicadas por fp e os
torques aplicados por p. Os vetores f1, . . . , fm indicam as foras trativas exercidas pelos m
cabos sobre a plataforma nos pontos de fixao.
Inicialmente considera-se os cabos como retilneos, inelsticos e de massa nula, e que a
direo de aplicao das traes sobre a plataforma representada diretamente pela direo
do cabo, dada pelos pontos de fixao e ancoragem.
45
-
FIG. 3.3 - Foras aplicadas sobre a plataforma
O vetor comprimento de cabo para o i-simo cabo li fornece a direo na qual o cabo
exerce trao sobre a plataforma por meio do vetor unitrio de comprimento de cabo vi , onde:
v i=l il i
(3.1)
De acordo com o modelo dinmico para manipuladores com cabos elsticos e de massa
nula apresentado por (VERHOEVEN, 2004; FANG, 2005; BRUCKMAN et al, 2008 e
MIKELSON et al, 2008) o problema de Equilbrio de Foras e Momentos dado por:
i=1m
f i f p=0 (3.2)e
i=1m
pi f i p=0 (3.3)Sabe-se que a fora de trao no i-simo cabo aplicada segundo a direo vi , logo:
f i= f ivi (3.4)
46
-
Onde fi o escalar que representa o modulo da fora aplicada sobre o i-simo cabo.
Utilizando os ndices m e n, as EQ. 3.2 e 3.3 podem ser escritas na forma matricial por:
[ v1 vmp1v1 pmvm][ f 1f m]+ [ f p p ]=0 (3.5)E este sistema frequentemente abreviado para:
AT f + w = 0 (3.6)
AT representa a Matriz de Estrutura do problema, e f vetor das m foras trativas sobre a
plataforma nos pontos de fixao. (OU, 1994) e (VERHOEVEN, 2004) apresentam maiores
esclarecimentos sobre o sistema AT f + w = 0 e a teoria em torno da Matriz de Estrutura.
Como trata-se de um sistema acionado por cabos, deve-se verificar sempre que todas as
tenses sejam positivas e delimitadas por traes mximas e mnimas, de acordo com as
caractersticas de projeto, segundo as EQ. 3.7 e 3.8.
fi > 0, para todo i=1, . . ,m. (3.7)
Fmin || fi || fmax, para todo i=1, . . ,m e em qualquer ponto do cabo. (3.8)
Em geral o sistema representado pelas EQ. 3.6 e 3.8 que so as Equaes Bsicas de
Soluo do Sistema. A condio imposta pela EQ. 3.8 ocorre devido a trao variar ao longo
do comprimento do cabo, quando este possui massa no nula.
3.2 CINEMTICA INVERSA
A cinemtica e a dinmica inversa de manipuladores paralelos acionados por cabos j so
extensamente conhecidas e no o objetivo deste trabalho detalha-la aqui. Nesta seo e na
47
-
prxima as equaes principais da cinemtica e da dinmica inversa da Plataforma de Stewart
acionada por cabos sero apresentadas de maneira sucinta. Maiores detalhes podem ser
encontrados em (FANG, 2005; BRUCKMAN et al, 2008; e TRAVI, 2009).
A cinemtica inversa refere-se ao problema de calcular as variveis de junta, neste caso o
comprimento de cabo, dadas a posio e orientao da plataforma. O mesmo se aplica a suas
derivadas. Neste ponto poderia ser utilizada ainda a cinemtica direta, no entanto devido ao
objetivo final do trabalho requerer cabos em catenria, este mtodo se torna ineficiente.
A postura da plataforma dada pela posio r = [x y z] e orientao = [ ], segundo a seqncia de rotao tridimensional ZYX, de RL em RG nos seis graus de liberdade e
representada pelo vetor x = [rT T]T, onde:
o ngulo representa a rotao em torno do eixo z;
o ngulo , a rotao em torno do eixo y; e,
o ngulo , a rotao em torno do eixo x.
A cinemtica inversa do manipulador paralelo acionado por cabos dada pelas m
equaes de restrio:
li = bi r Rp(x) pj,L , para i=1, . . ,m (3.9)
para sistemas que considerem a massa dos cabos nula, em funo da posio e orientao da
plataforma com respeito ao referencial RG. Deve-se atentar, na EQ. 3.9, que pj,L constante em
RL para os j pontos de fixao da plataforma.
Sendo li o vetor comprimento de cabo do i-simo cabo, pode-se definir o vetor q como
sendo o vetor modulo de comprimento de cabo, onde:
qi = ||li|| (3.10)
Assim para uma trajetria x(t), qi(t) representa a curva de comprimento do i-simo cabo
em relao ao tempo.
48
-
A matriz de rotao Rp(x) obtida pela seqncia de rotao tridimensional ZYX dada
por:
Rpx=[ CC CS SSC CS CSSSC SS SCC SS CCSS C S C C ] (3.11)onde C e S so abreviaes para cosseno e seno, respectivamente. A demonstrao da matriz
de rotao se encontra no APNDICE 2.
As EQ. 3.9 e 3.10 descrevem o vetor modulo do comprimento de cabo como uma funo
vetorial da posio. Desta forma, q pode ser representado pela funo vetorial x como:
q = x(x) (3.12)
Derivando a EQ. 3.12 obtm-se o vetor velocidade dos cabos dada pela EQ. 3.13. Como a
EQ. 3.12 uma funo vetorial, sua derivada resulta no Jacobiano de x(x). A acelerao dos
cabos dada pela EQ. 3.14:
q=J xx , onde J x= x x
(3.13)
q=J xx J xx (3.14)
De acordo com a EQ. 3.13, a velocidade dos cabos funo da derivada temporal dos
ngulos de Cardan, porem como estes no so variveis integrveis nem representveis no R,
devem ser transformados em velocidades angulares da plataformas em relao RG, conforme
a EQ. 3.15:
= [ x y z ]T (3.15)
49
-
(FANG, 2005) define esta transformao linear por meio da matriz Hb-1 como:
= Hb-1 (3.16)
onde:
H b1=[ 0 S C C 0 C S C 1 0 S ] e =[
] (3.17)
Aplicando as EQ. 3.13, 3.16 e 3.17, e pelo princpio dos trabalho virtuais, obtm-se o
vetor velocidade de cabos. Esta transformao tambm descrita em (FANG, 2005).
q=A[ I 3 0303 H b1][ r P ] (3.18)onde A a transposta da Matriz de Estrutura AT.
3.3 DINMICA INVERSA
Analisando agora a FIG. 3.3 quanto ao equilbrio dinmico e utilizando as Leis de
Newton-Euler para o caso geral 3T3R, tem-se:
{ mp r p=[ 00m p g] f pIG I = p
(3.19)
50
-
Onde:
mp a massa da plataforma;
rp o vetor posio da plataforma em RG;
IG o tensor de inercia definido em RG em funo dos ngulos de rotao;
o vetor de velocidades angulares em RG
Aqui deve ser observado que IG representa o tensor de inrcia da plataforma em relao
ao referencial global RG, contudo na equao do modelo dinmico ser descrito em funo do
tensor de inrcia em relao ao referencial local RL, pois este constante independentemente
da posio e orientao da plataforma.
Sabe-se, da EQ. 3.6, que w = [ fpT pT]T. Aplicando as EQ. 3.16 e 3.17 e suas derivadas na
EQ. 3.19, obtm-se a Equao do Movimento proposta por (FANG, 2005) para a dinmica da
plataforma, expresso pela EQ. 3.20:
[m p I 3 0303 H bT I L Hb1][ r p ]M p x
[ 0H bT H b1 I L Hb1 ]gC
[mp g0 ]gE
=[ I 3 0303 HbT ]AT f (3.20)
Onde, nesta equao:
I3 indica a matriz identidade 3x3 e IL representa o tensor de inercia da plataforma em
relao ao referencial local RL;
Mp a matriz de massa;
gC corresponde ao termo de coriolis; e,
gE corresponde ao vetor de foras externas aplicadas sobre a plataforma, neste caso
representada somente pela fora peso.
As matrizes acima so apresentadas de forma explicita, segundo apresentado em (FANG,
2005) no ANEXO 5.
51
-
Reorganizando a EQ. 3.20, esta pode ser escrita na forma da Equao bsica do
problema:
AT f[ I 3 0303 H bT 1]M p xgCgE w
=0(3.21)
Assim possvel obter os esforos externos, partir da Equao de Movimento da
Plataforma.
Apresentadas as Equaes Bsicas de Sluo do Sistema e a Equao de Movimento,
possvel demonstrar a possibilidade de comportamento IRPM por qualquer tipo de plataforma
segundo proposio de (VERHOEVEN, 1998) citada no item 2.2.1:Para qualquer
referencial local da plataforma, a Matriz de Estrutura deve conter, em cada linha, pelo menos
um elemento negativo.
Calculando-se os produtos escalares viei , onde ei so os vetores ortonormais de RL, para
qualquer referencial local na plataforma, e no havendo pelo menos um produto viei < 0, tem-
se que, nesta posio, no existem cabos em direes suficientes para estabilizar a plataforma
e a aplicao de uma fora externa na direo conveniente se torna necessria.
Outra demonstrao pode ser obtida da seguinte forma:
Manipuladores CPRM e RRPM, por definio, no dependem da aplicao de foras
externas para o equilbrio dinmico, logo se para w = 0 em determinada posio x
pertencente ao espao de trabalho controlvel no exista nenhum viei < 0 para i = 1, . . ,m,
ento necessariamente o manipulador classificado como IRPM.
52
-
4 ANLISE DO ESPAO DE TRABALHO
A anlise do espao de trabalho uma das tarefas primordiais no estudo de plataformas
acionadas por cabos. Para a definio do problema so necessrios:
a) A geometria da plataforma e dos pontos de ancoragem;
b) Os limites mnimo e mximo de foras nos cabos; e,
c) As foras externas aplicadas na plataforma;
A partir destes dados se torna possvel determinar a regio na qual a plataforma pode ser
empregada e analisar aspectos do espao de trabalho como:
a) foras nos cabos;
b) presena de singularidade;
c) rigidez do sistema; e,
d) auto-colises de cabos.
(BRUCKMANN et al, 2008) dividem este tpico em duas etapas complementares para o
projeto. Define-se como Anlise do Espao de Trabalho (Analysis) a obteno do conjunto de
posies e orientaes (posturas) nas quais as Equaes Bsicas de Soluo do Sistema,
definidas pelas EQ. 3.6 e 3.8 possuam soluo para a distribuio de foras f, e define como
Sntese (Robot Design) o problema inverso de determinao do manipulador timo capaz de
atender determinado espao de trabalho pr-determinado.
Basicamente existem quatro definies de Espao de Trabalho.
a) (VERHOEVEN, 1998) define o Espao de Trabalho (WS) como sendo o conjunto
de posturas da plataforma que satisfazem as EQs. 3.6 e 3.7, tal que para dado espao
vetorial de esforos W(r,), esta possa exercer qualquer esforo w W(r,). Verifica-se que esta definio no atende as Equaes Bsicas de Soluo do Sistema, por no
atender a EQ. 3.8.
53
-
b) Ainda em (VERHOEVEN, 1998) definido o Espao de Trabalho com Respeito
s Tenses (WST(kmax)) como sendo o conjunto de todas as posies do Espao de
Trabalho que satisfazem as EQs. 3.6 e 3.8, tais que kmax = fmax / fmin, 0 < fmin < fmax, e w = 0.
No caso em que WST(1) este espao chamado Espao de Trabalho Isotrpico.
c) (VERHOEVEN, 2004) define o Espao de Trabalho Controlvel e (FANG, 2005)
define o Espao de Trabalho Controlvel Aceitvel como sendo o conjunto de todas as
posies que satisfazem as EQs. 3.6 e 3.8 e nas quais a plataforma seja capaz de exerer
esforos e apresentar os graus de liberdade desejados. Logo o Espao de Trabalho
Controlvel de (VERHOEVEN, 2004) funo da aplicao a que a plataforma estar
sujeita.
d) Por ltimo, (FANG, 2005) define o Espao de Trabalho Controlvel Usvel como
sendo o conjunto de todas as posies pertencentes ao Espao de Trabalho Controlvel,
onde para determinados limites de torque nos atuadores Umin e Umax possa-se atender as
EQs. 3.6, 3.7 e 3.8, e a condio Umin < U < Umax
Quanto as definies citadas acima podem ser feitas as seguintes consideraes:
a) O Espao de Trabalho com Respeito s Tenses se aplica somente ao caso de
carregamento homogneo sobre a plataforma;
b) Nos Espaos de Trabalho definidos por (VERHOEVEN, 2004) e (FANG, 2005)
deve-se atender as Equaes Bsicas do problema para dados x, w, fmin e fmax;
c) O espao de trabalho definido pelos limites mnimos e mximos de torques
propostos por (FANG, 2005), constitui-se no estudo mais completo da Plataforma de
Stewart acionada por cabos dentre as quatro definies apresentadas; e,
d) Esta Dissertao baseia seu estudo no Espao de Trabalho Controlvel de
(VERHOEVEN, 2004) e ir referir-se a ele simplesmente como espao de trabalho.
So requisitos do espao de trabalho que:
a) A plataforma seja controlvel;
b) As tenses sejam todas positivas e pertencentes ao intervalo definido;
c) O atuador final seja livre de singularidades;
d) A estrutura do sistema seja suficientemente rgida; e,
e) No hajam auto-colises entre tendes.
54
-
No entanto verifica-se que o atendimento a estes requisitos reduz consideravelmente o
espao de trabalho, podendo ser inferior a de um manipulador serial. Logo as vantagens de
utilizao deste tipo de sistema devem estar claras na fase inicial do projeto.
Dentre os requisitos citados, os que mais contribuem para a reduo do espao de
trabalho so:
a) A controlabilidade da plataforma nos graus de liberdade necessrios a aplicao; e,
b) Os limites de fora nos cabos, definidos pelo fabricante e por critrios de
segurana.
(FANG, 2005) em sua definio de Espao de Trabalho Controlvel Aceitvel
demonstra que a controlabilidade da plataforma reduz-se a medida que esta se aproxima do
limite do espao de trabalho e que a orientao da plataforma funo do espao de trabalho
controlvel.
Verifica-se tambm que ao se mover a plataforma para prximo do limite do espao de
trabalho, as tenses nos cabos vo se aproximando de seus limites, o que reduz
gradativamente sua capacidade de emprego.
A partir do conceito de espao de trabalho possvel apresentar as caractersticas
principais de manipuladores seriais e paralelos, e ratificar a afirmao de que manipuladores
seriais so inadequados ao objetivo deste trabalho.
Uma definio do comportamento de manipuladores seriais e paralelos e dada segundo
(VERHOEVEN, 2004). Para ele, o comportamento tradicional de manipuladores seriais
descrito em termos de mobilidade, devido ao objetivo principal de um manipulador serial ser
a habilidade do atuador final se mover em determinada direo de interesse, em todo o
Espao de Trabalho, sem que os limites de junta sejam exercidos. Em contrapartida, sistemas
paralelos so tipicamente descritos em termos de controlabilidade, que a habilidade de
exercer esforos em determinada direo de interesse.
Supondo que o espao de trabalho desejado permita uso de manipuladores seriais, caso
sua utilizao no preservaria os limites de junta em posturas prximas dos limites do espao
de trabalho, principalmente quanto a esforos aplicados sobre o mecanismo. O mesmo
problema seria verificado em manipuladores paralelos com atuadores rgidos.
55
-
A FIG. 4.1 ilustra o Espao de Trabalho Controlvel Aceitvel para o SEGESTA,
apresentado por (FANG, 2005).
a) Modelo do manipulador b) Espao de trabalho controlvel
FIG. 4.1 Espao de trabalho definido por (FANG, 2005) para o SEGESTA(BRUCKMANN et al, 2008)
4.1 SINGULARIDADES
Singularidades do sistema so funo da configurao do manipulador. (VERHOEVEN,
1998) classifica a singularidade de manipuladores paralelos em dois tipos:
a) Tipo I (Sub-mobilidade ou Redundncia de velocidade): situao em que h
determinado deslocamento infinitesimal x do atuador que no pode ser afetado por uma
variao infinitesimal l das juntas; e,
b) Tipo II (Sobre-mobilidade ou Redundncia de Foras): situao em que h um
deslocamento x que no altera nenhuma varivel de junta l.
(VERHOEVEN, 1998) prope ainda que plataformas de Stewart acionadas por cabos
nunca sero singulares do Tipo I, pois todo movimento de cabo implica em mvimento da
plataforma, e que uma singularidade do Tipo II poder ir ocorrer se Posto (AT) < n.
A seguir so apresentadas duas figuras que ilustram os casos de sub-mobilidade e sobre-
mobilidade. Como no se verifica um caso de singularidade do Tipo I ou sub-mobilidade em
manipuladores paralelos, esta apresenta em manipuladores seriais com atuadores rgidos e
56
-
em seguida apresentado o caso de singularidade do Tipo II ou Sobre-Mobilidade em
manipuladores paralelos atuados por cabos.
a) Redundncia de velocidades b) Sub-mobilidade
FIG. 4.2 Singularidade do Tipo I ou Sub-mobilidade (VERHOEVEN, 2004)
Na FIG. 4.2 a) verifica-se que h uma posio no espao de juntas, nas quais a velocidade
no afeta a posio do atuador final, caracterizando a redundncia de velocidades, e em b)
verifica-se que no h soluo no espao de junta que exera o movimento rotacional
desejado no atuador final.
Ao contrrio do ilustrado na FIG. 4.2, em manipuladores paralelos acionados por cabos,
caso a posio pertena ao Espao de Trabalho Controlvel, qualquer variao de
comprimento de cabo afetar a posio da plataforma, no s