
analise da operação de um gerador de indução trifásico ...
86
ANALISE DA OPERAÇÃO DE UM GERADOR DE INDUÇÃO TRIFÁSICO ALIMENTANDO CARGA ISOLADA João Roberto Santos Leal DRE:108088451 Projeto de Graduação apresentado ao Curso de Engenharia Elétrica da Escola Politécnica, Universidade Federal do Rio de Janeiro, como parte dos requisitos necessários à obtenção do título de Engenheiro. Orientador: Sebastião Ércules Melo de Oliveira, D.Sc. Rio de Janeiro Abril de 2016
-
Upload
hoangtuyen -
Category
Documents
-
view
217 -
download
2
Transcript of analise da operação de um gerador de indução trifásico ...
ANALISE DA OPERAÇÃO DE UM GERADOR DE INDUÇÃO TRIFÁSICO
ALIMENTANDO CARGA ISOLADA
João Roberto Santos Leal
DRE:108088451
Projeto de Graduação apresentado ao Curso de
Engenharia Elétrica da Escola Politécnica, Universidade
Federal do Rio de Janeiro, como parte dos requisitos
necessários à obtenção do título de Engenheiro.
Orientador: Sebastião Ércules Melo de Oliveira, D.Sc.
Rio de Janeiro
Abril de 2016

ii
ANALISE DA OPERAÇÃO DE UM GERADOR DE INDUÇÃO ALIMENTANDO
CARGA ISOLADA DA REDE
João Roberto Santos Leal
PROJETO SUBMETIDO AO CORPO DOCENTE DO DEPARTAMENTO DE
ENGENHARIA ELÉTRICA DA ESCOLA POLITÉCNICA DA UNIVERSIDADE
FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS
PARA A OBTENÇÃO DO GRAU DE ENGENHEIRO ELETRICISTA.
Aprovado por:
________________________________________
Prof. Sebastião Ércules Melo de Oliveira, D.Sc.
(Orientador)
________________________________________
Prof. Sergio Sami Hazan, Ph.D.
________________________________________
Prof. Heloi José Fernandes Moreira, D.Sc.
RIO DE JANEIRO, RJ - BRASIL
ABRIL DE 2016

iii
ABRIL DE 2016
Leal, João Roberto Santos
Análise da operação de um gerador de indução trifásico
alimentando carga isolada. – Rio de Janeiro: UFRJ/Escola
Politécnica, 2016.
X, 80 p.: il.; 29,7 cm.
Orientador: Sebastião Ércules Melo de Oliveira, D.Sc.
Projeto de Graduação – UFRJ/ Escola Politécnica/ Curso
de Engenharia Elétrica, 2016.
Referências Bibliográficas: p. 80.
1. Introdução. 2. Fundamentos Teóricos. 3. Ensaios - Métodos de
calculo e resultados experimentais. 4. Simulação Digital do
Comportamento da Máquina. 5. Análise dos Resultados e
Conclusões. 6. Apêndices. 7. Referências Bibliográficas. I.
Oliveira, Sebastião Ércules Melo II. Universidade Federal do Rio
de Janeiro, Escola Politécnica, Curso de Engenharia Elétrica. III.
Análise da operação de um gerador de indução trifásico
alimentando carga isolada
iv
AGRADECIMENTOS
Agradeço aos meus pais, Roberto José Leal e Angela Maria dos Santos, e aos meus
irmãos, Tomaz Lucas Santos Leal e Maria Luiza Santos Leal, pois são eles, aqueles que me
mantém forte para conquistar meus objetivos.
A minha namorada, Thérèsse Camille Nascimento Holmström, pelo carinho,
companheirismo e incentivo, que tornaram mais fácil essa jornada.
Ao meu orientador, Sebastião Ércules Melo de Oliveira, por me passar o
conhecimento necessário para desenvolver esse trabalho.
Aos técnicos do Laboratório de Máquinas, André e Sérgio, por todo o suporte
necessário na execução dos ensaios.
Aos grandes amigos e companheiros de Curso, por terem me acompanhado e me
mantido motivado durante todo o percurso.
v
Resumo do Projeto Final apresentado ao Departamento de Engenharia Elétrica como parte
dos requisitos necessários para a obtenção do grau de Engenheiro Eletricista
ANALISE DA OPERAÇÃO DE UM GERADOR DE INDUÇÃO ALIMENTANDO
CARGA ISOLADA DA REDE
João Roberto Santos Leal
Abril/2016
Orientador: Sebastião Ércules Melo de Oliveira
Curso: Engenharia Elétrica
Esse trabalho tem por objetivo analisar o comportamento de um gerador de indução ao ser
auto excitado por capacitores, sem conexão com a rede elétrica. Será desenvolvido um
modelo para o estudo da máquina de indução operando como gerador e, através desse modelo,
será implementada uma simulação digital, que deve ser comparada com o comportamento real
da máquina, com o intuito de validar o estudo. Para o desenvolvimento do modelo da
máquina, é necessário identificar os seus parâmetros, como as resistências e reatâncias,
através de um ensaio com o rotor bloqueado, e a curva de magnetização, traçada com o motor
operando a vazio. Tendo-se os resultados desses ensaios, será dimensionado um valor de
capacitância a ser usada para auto excitar o gerador de indução. Essa capacitância será
implementada tanto no ensaio, quanto na simulação. Ao final será feita uma análise dos
resultados obtidos.
Palavras-chave: Gerador de indução, auto excitado, capacitores, ensaio a vazio, ensaio de
rotor bloqueado.

vi
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of
the requirements for the degree of Electrical Engineer.
Analysis of the Operation of an Induction Generator Isolated from the Power Grid
João Roberto Santos Leal
April/2016
Advisors:
Course: Electrical Engineering
This study aims to analyze the behavior of an induction generator to be self excited by
capacitors without connection to the power grid. A digital simulation should be made, to be
compared with the actual behavior of the machine in order to validate the model, which is
developed to study the induction machine operating as a generator. To develop the model of
the machine, it is necessary to identify its parameters such as resistance and reactance, by a
blocked rotor test, and the magnetization curve, plotted with the engine operating free of any
loads. With the results of these trials, a capacitance value to be used for exciting the induction
generator is scaled. This capacitance will be implemented in the main test and in the
simulation. At the end, an analysis of the results will be made.
Key words: Induction generator, capacitors, free load test, blocked rotor test

vii
Sumário
Listas de Figuras ........................................................................................................................ ix
1 Capítulo 1 ............................................................................................................................. 1
Introdução ................................................................................................................................... 1
2 Capítulo 2 ............................................................................................................................. 2
Fundamentos teóricos ................................................................................................................. 2
2.1 Maquinas Elétricas ........................................................................................................ 2
2.2 Motor de Indução ........................................................................................................... 3
2.2.1 Conjugado Induzido ............................................................................................... 3
2.2.2 O conceito de escorregamento ................................................................................ 4
2.2.3 Características Construtivas ................................................................................... 7
2.2.4 Circuito Equivalente ............................................................................................... 8
2.2.5 Fluxo de potencia .................................................................................................. 10
2.3 Operação como Gerador .............................................................................................. 12
2.3.1 Diagrama de fluxo de potencia ............................................................................. 12
2.3.2 Descrição do fenômeno de auto-excitação ........................................................... 13
2.3.3 Magnetismo Residual da máquina ........................................................................ 15
2.3.4 Desenvolvimento do modelo utilizado ................................................................. 15
3 Capítulo 3 ........................................................................................................................... 22
Ensaios - Métodos de cálculo e resultados experimentais ........................................................ 22
3.1 Características da maquina de indução utilizada ......................................................... 23
3.2 Ensaio de Rotor bloqueado à corrente nominal ........................................................... 25
3.2.1 Material utilizado .................................................................................................. 25
3.2.2 Procedimento experimental .................................................................................. 26
3.2.3 Valores Medidos ................................................................................................... 27
3.2.4 Cálculo dos Parâmetros ........................................................................................ 28
3.3 Ensaio em Vazio .......................................................................................................... 32

viii
3.3.1 Material Utilizado ................................................................................................. 33
3.3.2 Procedimento Experimental ................................................................................. 33
3.3.3 Valores Medidos ................................................................................................... 34
3.3.4 Curva Tensão Terminal x Corrente no Estator ..................................................... 37
3.3.5 Definição de uma Faixa de Capacitores de Excitação .......................................... 38
3.3.6 Curva de Magnetização ........................................................................................ 41
3.3.7 Relação entre Tensão de Entreferro e Reatância de Magnetização ...................... 43
3.3.8 Comportamento das Componentes de Tensão e Corrente .................................... 45
3.4 Ensaio na Maquina de Indução Funcionando como Gerador Auto Excitado .............. 46
3.4.1 Material Utilizado ................................................................................................. 46
3.4.2 Procedimento Experimental ................................................................................. 47
3.4.3 Ensaio sob Carga Resistiva ................................................................................... 50
3.4.4 Forma de Onda de Tensão e Corrente .................................................................. 52
4 Capítulo 4 ........................................................................................................................... 56
Simulação Digital do Comportamento da Máquina ............................................................. 56
4.1 Descrição do Método Utilizado ................................................................................... 56
4.1.1 Newton-Raphson .................................................................................................. 57
4.2 Descrição do Programa ................................................................................................ 58
4.2.1 Resultados Obtidos ............................................................................................... 60
5 Capítulo 5 ........................................................................................................................... 62
Análise dos Resultados e Conclusões ....................................................................................... 62
6 Apêndices ........................................................................................................................... 71
7 Referências Bibliográficas .................................................................................................. 75
ix
Listas de Figuras
Figura 1 – Curva Torque x Escorregamento .............................................................................. 6
Figura 2 – Máquina de Indução de Rotor Bobinado. [ Fonte: www.portaleletricista.com.br,
2016 ] .......................................................................................................................................... 7
Figura 3 – Maquina de indução Rotor Gaiola de Esquilo [ Fonte:
www.portaleletricista.com.br, 2016 ] ......................................................................................... 8
Figura 4 – Circuito equivalente por fase de um motor de indução. .......................................... 10
Figura 5 – Fluxo de Potência no Motor de Indução. ................................................................ 11
Figura 6 – Fluxo de Potência no Gerador de Indução (CHAPALLAZ, 1992). ........................ 13
Figura 7 – Retas que determinam a faixa de capacitância ........................................................ 14
Figura 8 – Circuito Equivalente do Gerador de Indução em Carga. ........................................ 17
Figura 9 – Circuito Equivalente Final do Gerador de Indução em Carga corrigido com fpu. . 18
Figura 10 – Ligações dos terminais em Delta-220V e Estrela-380V. ...................................... 24
Figura 11 – Ligações dos terminais em Delta-440V e Estrela-760V. ...................................... 24
Figura 12 –Conexões do Mavowatt 30 para máquina ligada em delta. .................................... 26
Figura 13 – Circuito Equivalente do Gerador de Indução com o Rotor bloqueado. ................ 28
Figura 14 – Reta de Resistência. .............................................................................................. 29
Figura 15 – Reta de Impedância. .............................................................................................. 31
Figura 16 – Curva Vt x Is. ........................................................................................................ 37
Figura 17 – Reta associada a linha de entreferro. ..................................................................... 38
Figura 18 – Curva a vazio com a reta associada a capacitância máxima. ................................ 40
Figura 19 – Curva de Magnetização ......................................................................................... 43
Figura 20 – Forma de onda de corrente e tensão da maquina funcionando a vazio. ................ 45
Figura 21 – Forma de onda de corrente e tensão da maquina operando a vazio na sua região de
saturação. .................................................................................................................................. 46
Figura 22 – Esquema de montagem do ensaio em carga. ......................................................... 48
Figura 23 – Bancada do ensaio com o gerador de indução. ..................................................... 49
Figura 24 – Formas de onda de tensão e corrente em um ponto de operação saturado. .......... 53
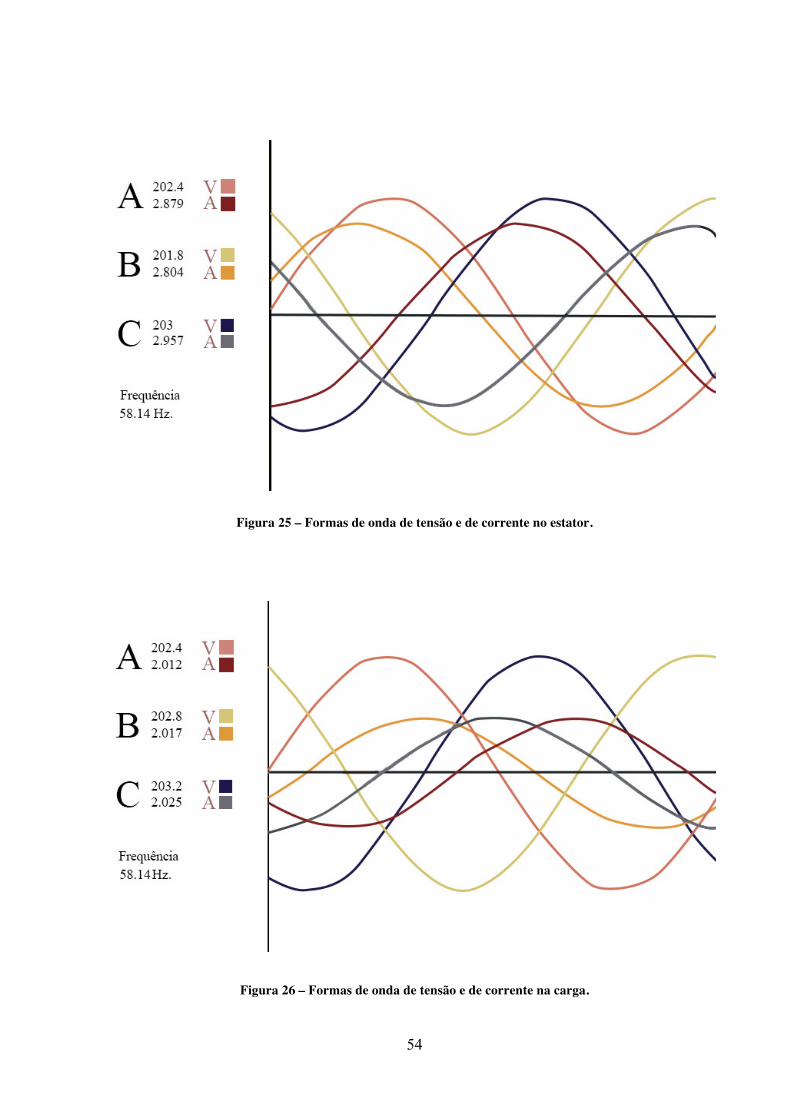
Figura 25 – Formas de onda de tensão e de corrente no estator. .............................................. 54
Figura 26 – Formas de onda de tensão e de corrente na carga. ................................................ 54
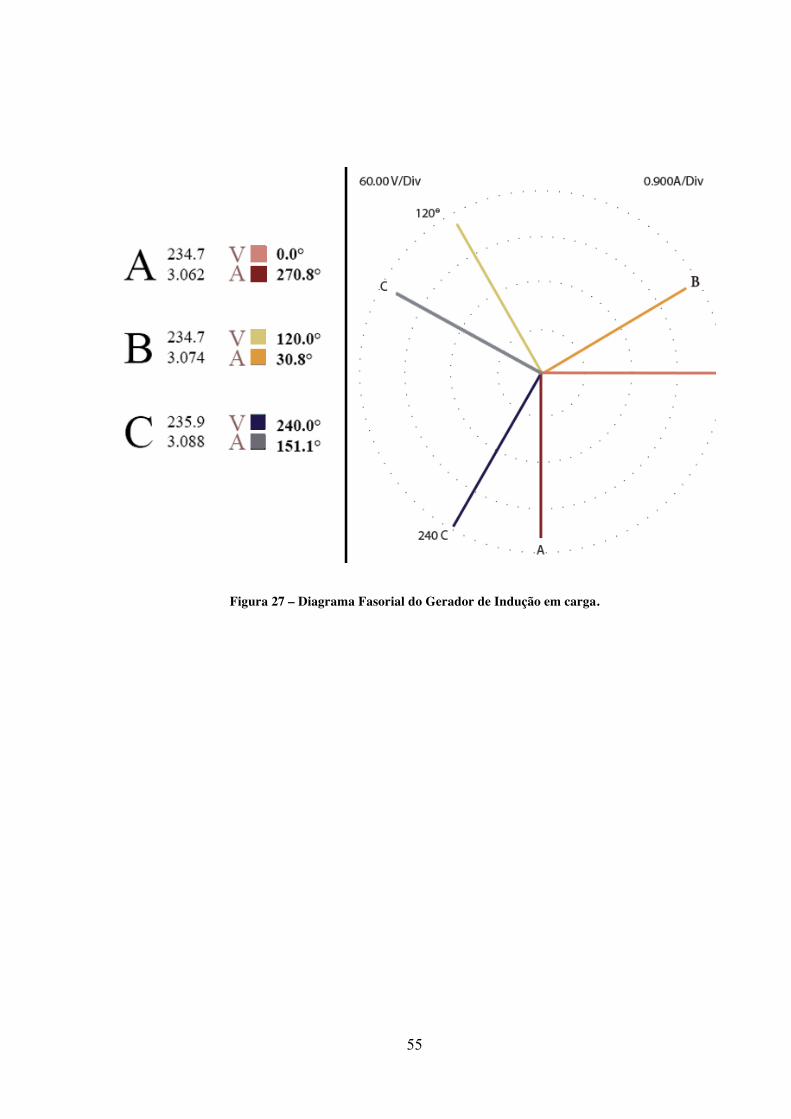
Figura 27 – Diagrama Fasorial do Gerador de Indução em carga. ........................................... 55
Figura 28 – Curva Tensão Terminal x Potência de Saída. ....................................................... 62
Figura 29 – Curva Tensão Terminal x Resistencia de carga. ................................................... 65

x
Figura 30 – Curva Corrente no Estator x Resistencia de carga. ............................................... 67
Figura 31 – Curva Corrente na carga x Resistencia de carga. .................................................. 68
Figura 32 – Curva Frequência x Resistencia de carga. ............................................................. 69

xi
Lista de Tabelas Tabela 1 – Informações da placa da maquina ........................................................................... 23
Tabela 2 – Valores de cada fase de tensão e corrente. ............................................................. 27
Tabela 3 – Valores médios por fase. ......................................................................................... 27
Tabela 4 – Valores das reatâncias e resistências do estator e do rotor. .................................... 32
Tabela 5 – Resultados do ensaio a vazio. ................................................................................. 34
Tabela 6 – Valores médios entre as 3 fases. ............................................................................. 36
Tabela 7 – Valores da Tensão de entreferro ............................................................................. 41
Tabela 8 – Valores da Tensão de entreferro ............................................................................. 44
Tabela 9 – Valores medidos nas 3 fases para capacitor de 60 µμF ............................................ 50
Tabela 10 – Valores medidos nas 3 fases para capacitor de 60 µμF .......................................... 51
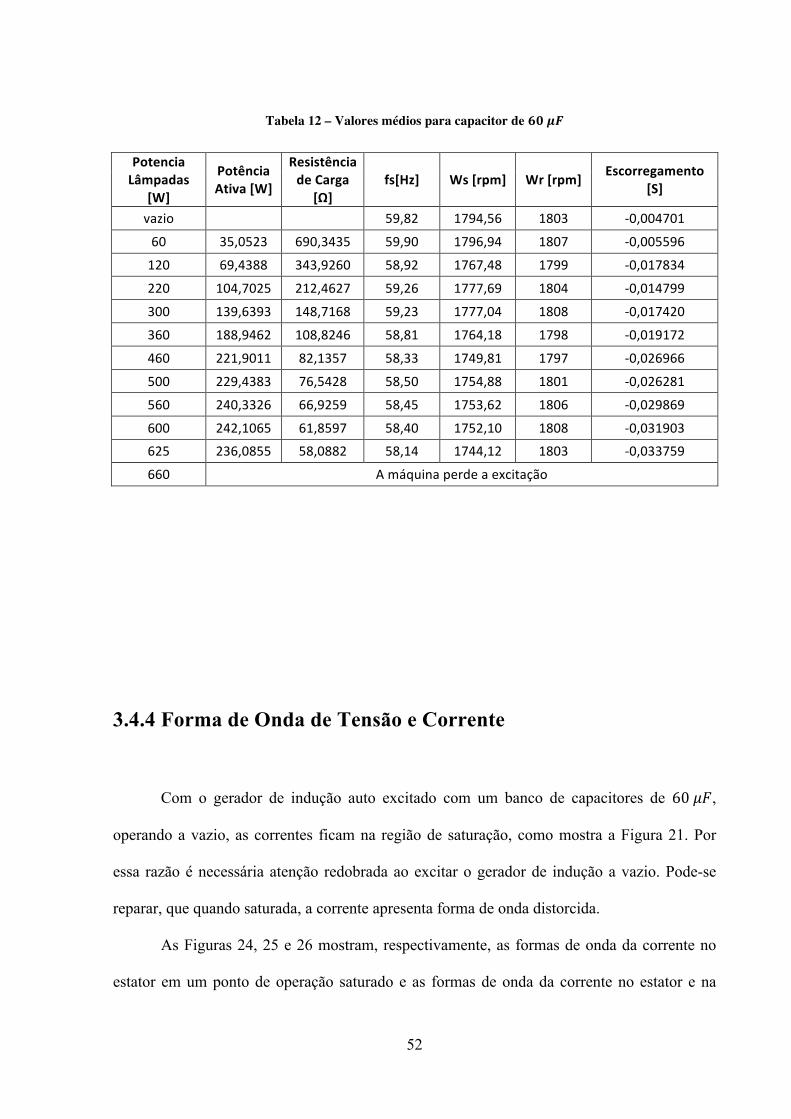
Tabela 11 – Valores médios para capacitor de 60 µμF .............................................................. 51
Tabela 12 – Valores médios para capacitor de 60 µμF .............................................................. 52
Tabela 13 – Resultados da simulação para capacitor de 60 µμF ................................................ 61

1
1 Capítulo 1
Introdução
Os geradores de indução estiveram em uso desde o inicio de século XX, entretanto, foi
com a crise do preço do petróleo de 1973, que começaram a ser usados em grande escala. Os
custos de energia se tornaram muito elevados e a recuperação de energia se tornou uma parte
importante da economia em muitos processos industriais. O gerador de indução requer pouco
em termos de manutenção ou de controle.
Devido a sua simplicidade e ao pequeno tamanho por quilowatt de potencia de saída,
os geradores de indução são também muito indicados para geradores eólicos de pequeno
porte. Muitos desse geradores eólicos que estão no comércio são projetados para funcionar em
paralelo com grandes sistemas de potência, fornecendo uma fração das necessidades totais de
potencia dos consumidores.
De uma forma geral, a máquina de indução, trabalhando como motor ou como
gerador, utiliza uma fonte de energia alternada para fornecer a potencia reativa necessária à
sua magnetização. Quando ligado em paralelo à rede, sua corrente de magnetização é suprida
pelas maquinas síncronas do sistema, ficando frequência e tensão controladas pela própria
rede. Já na operação isolada da rede, essa fonte de energia alternada é substituída por um
banco de capacitores, dimensionados de forma a serem capazes de promover a auto-excitação.
Esse trabalho é motivado pelo interesse em se estudar a viabilidade de gerar energia
elétrica através de uma máquina de indução trabalhando em regime permanente, isolada da
rede elétrica e auto-excitada por capacitores. Havendo disponibilidade de utilização de
quedas d’agua ou de energia eólica para o acionamento da máquina, esta poderá ser de grande
utilidade em comunidades isoladas, podendo suprir uma demanda de energia elétrica não
atendida pelas redes de distribuição.

2
2 Capítulo 2
Fundamentos teóricos
2.1 Maquinas Elétricas
Uma máquina elétrica é um dispositivo rotativo capaz de funcionar como um motor e
como um gerador. No primeiro caso, a máquina transforma energia elétrica em energia
mecânica, com a aplicação de tensão nas bobinas do estator e a obtenção de potencia
mecânica pelo eixo do rotor. Quando a máquina é operada como gerador, o procedimento é o
oposto do caso do motor, com a aplicação de potencia mecânica no eixo do rotor e a obtenção
da tensão induzida nos terminais do estator.
As máquinas elétricas assumem diversas formas e são conhecidas por diversos nomes,
tais como maquinas de corrente continua, síncronas, de imã permanente, de relutância
variável, de histerese, sem escovas e assim por diante. Embora aparentem ser bem diferentes
umas das outras, os princípios físicos que regem o comportamento de cada uma dessas
máquinas são bastante similares.
As máquinas de corrente alternada mais usadas são as síncronas e as de indução. Nas
máquinas síncronas, as correntes do enrolamento do rotor são fornecidas através de contatos
rotativos fixados diretamente na sua parte estacionária. Já nas de indução, as correntes são
induzidas no enrolamento do rotor por meio da combinação da variação, no tempo, de
correntes no estator e do movimento do rotor em relação ao estator.
As máquinas de indução são as máquinas de corrente alternada mais usadas quando se
necessita de acionamento mecânico, ou seja, no modo operativo como motor. Isso se deve ao
fato de ser uma máquina robusta e, por ser produzida em larga escala, de custo relativamente
baixo. A característica que diferencia essa máquina das demais é não haver a necessidade de
3
uma corrente continua de campo para funcionar. Para que se possa entender o funcionamento
da máquina de indução, vamos olhar sua operação como motor.
2.2 Motor de Indução
2.2.1 Conjugado Induzido
No motor de indução, o estator é excitado por corrente alternada, aplicada diretamente
aos seus terminais, ao passo que o rotor recebe a corrente por indução, como em um
transformador, a partir do enrolamento primário (estator). Quando a excitação é feita de uma
rede polifásica equilibrada, um campo magnético Bs é produzido no entreferro, girando na
velocidade síncrona Ns. Essa velocidade é determinada pelo número de polos P do estator e
pela frequência fs aplicada ao mesmo.
𝑁𝑠 =
120. 𝑓𝑠𝑃
(2.1)
O campo magnético girante Bs é o responsável por induzir tensão no rotor, dada pela
equação:
𝐸𝑖𝑛𝑑 = ( 𝑣 𝑥 𝐵!). 𝑙 (2.2)
𝐸𝑖𝑛𝑑 = Tensão induzida no rotor;
𝑣 = Velocidade do rotor em relação ao campo magnético;

4
𝐵! = Vetor densidade de fluxo magnético;
𝑙 = Comprimento de condutor dentro do campo magnético.
Essa tensão induz um fluxo de corrente atrasada em relação à tensão, devido a
indutância do rotor. E, por sua vez, o fluxo de corrente rotórica produz um campo magnético
Br, que interage com Bs, produzindo um conjugado T, onde:
𝑇 = 𝑘𝐵𝑟 𝑥 𝐵𝑠 (2.3)
Vale ressaltar que, em funcionamento normal, ambos os campos magnéticos, Bs e Br,
giram na mesma velocidade síncrona Ns, ao passo que o rotor gira a uma velocidade inferior.
Caso o rotor atingisse a velocidade Ns, ele ficaria estacionário em relação ao campo do
estator, assim não haveria tensão induzida, corrente ou campo magnético no próprio rotor.
Com isso, o conjugado induzido seria zero e o motor perderia velocidade pelas perdas por
atrito e ventilação.
2.2.2 O conceito de escorregamento
Dois termos são comumente utilizados para descrever o movimento relativo do rotor e
dos campos magnéticos. Um deles é a velocidade de escorregamento 𝑁!"#, definida como a
diferença entre a velocidade síncrona e a velocidade do rotor.

5
𝑁!"# = 𝑁𝑠 − 𝑁𝑟
O outro termo usado é o Escorregamento S, que é a velocidade relativa expressa em
uma base por unidade ou porcentagem. O escorregamento é definido como:
𝑆 =
𝑁𝑒𝑠𝑐𝑁𝑠
. 100% (2.4)
𝑆 =
𝑁𝑠 − 𝑁𝑟𝑁𝑠
. 100% (2.5)
O escorregamento também pode ser expresso em função da velocidade angular 𝜔, em
radianos por segundo.
𝑆 =𝜔𝑠 − 𝜔𝑟
𝜔𝑠. 100% (2.6)
É possível notar que se o rotor estiver girando na velocidade síncrona, S = 0, ao passo
que, se o rotor estiver estacionário, S = 1.
Com o escorregamento definido, podemos expressar a velocidade e a frequência do
rotor em sua função.
𝑁𝑟 = 1 − 𝑆 .𝑁𝑠 (2.7)
𝜔𝑟 = 1 − 𝑆 .𝜔𝑠 (2.8)
6
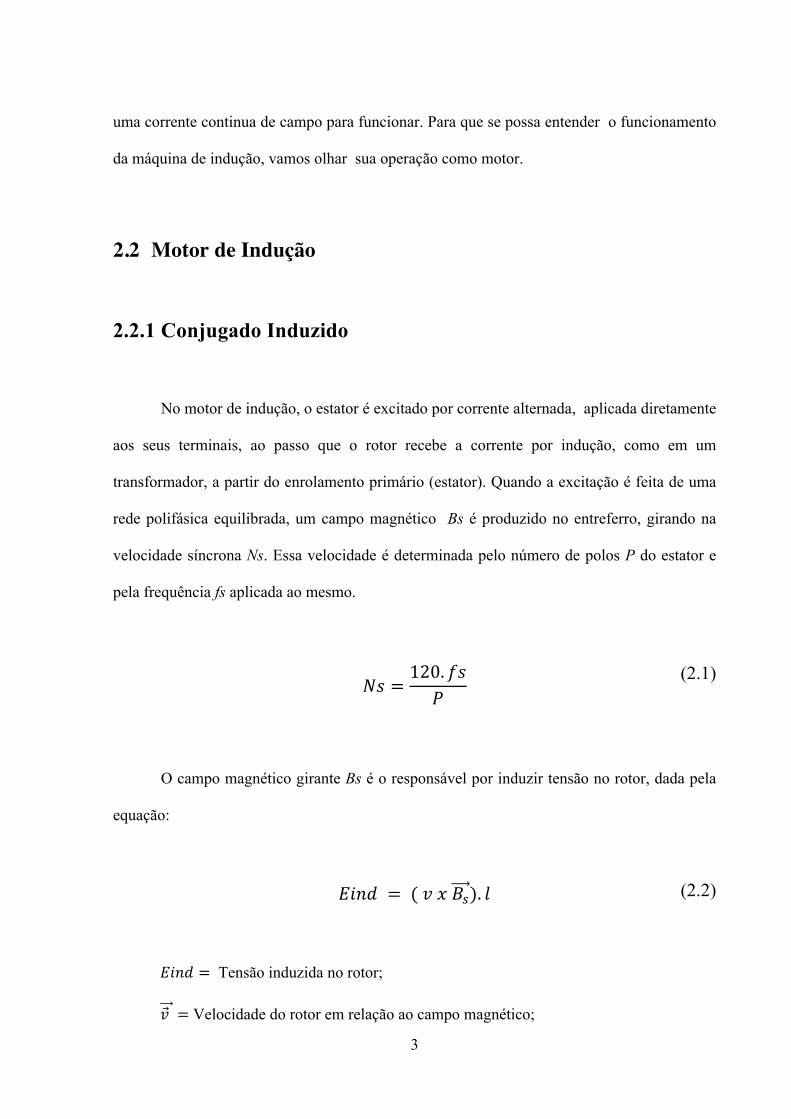
Para qualquer velocidade entre zero e 𝜔𝑠, a frequência do motor é diretamente
proporcional a S.
𝑓𝑟 = 𝑆. 𝑓𝑠 (2.9)
A maquina de indução, acionada a uma velocidade constante, opera segundo a curva
Torque (T) x Escorregamento S, como mostra a Figura 1.
Figura 1 – Curva Torque x Escorregamento

7
2.2.3 Características Construtivas
O rotor de uma maquina de indução pode ser de dois tipos. Um deles é o rotor
bobinado, que é construído na forma de um enrolamento polifásico, assim como o estator,
tendo o mesmo número de pólos. Os terminais do enrolamento de rotor são conectados a anéis
deslizantes montados sobre o eixo. Escovas de carvão são apoiadas sobre esses anéis,
tornando-os externamente acessíveis.
Figura 2 – Máquina de Indução de Rotor Bobinado. [ Fonte: www.portaleletricista.com.br, 2016 ]
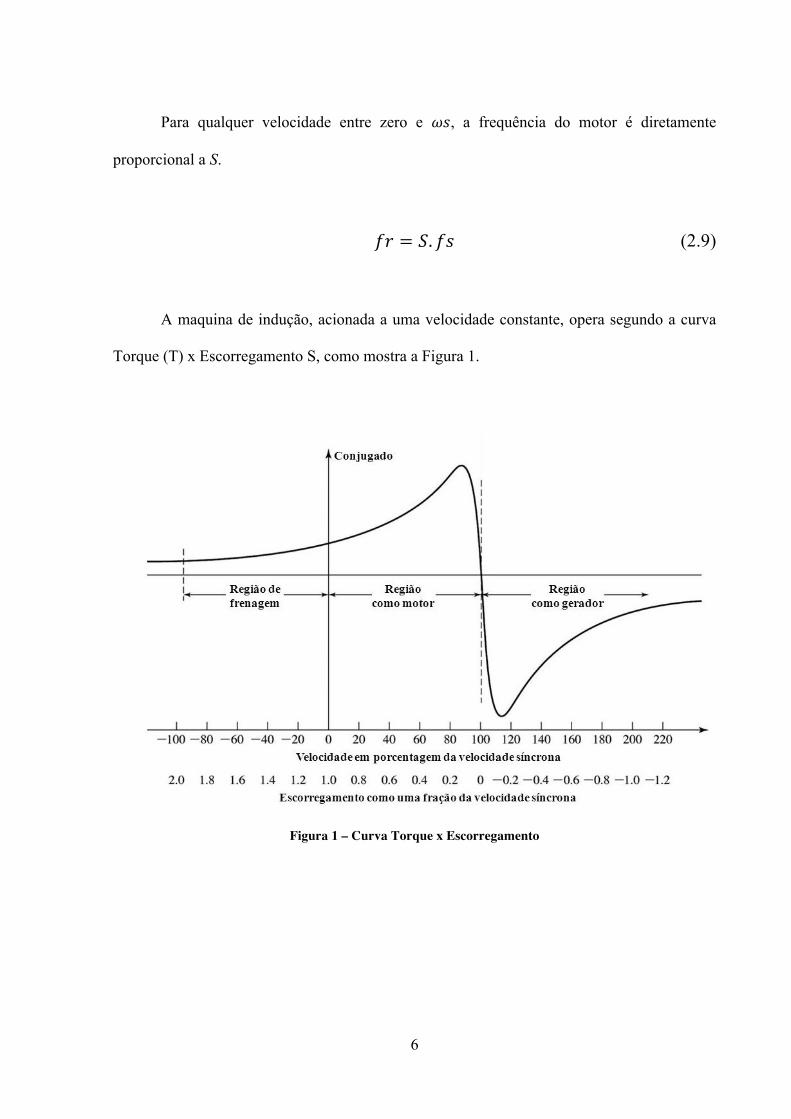
O outro tipo de rotor é o de gaiola de esquilo, no qual o enrolamento consiste em
barras condutoras encaixadas em ranhuras no ferro do rotor e curto circuitadas em cada lado
por anéis condutores. A extrema simplicidade e a robustez da construção em gaiola de
esquilo são motivos pelos quais essa configuração é a mais usada para aplicações como motor
e a mais indicada para aplicações como gerador. A robustez citada é decorrente da pouca
8
necessidade de manutenção, da ausência de anéis coletores ou escovas de carvão, além de
apresentar um entreferro mais regular e melhor resistência a esforços referentes a partida.
Figura 3 – Maquina de indução Rotor Gaiola de Esquilo [ Fonte: www.portaleletricista.com.br, 2016 ]
2.2.4 Circuito Equivalente
Como discutido anteriormente, o funcionamento do motor de indução se baseia na
indução, efetuada pelo circuito do estator, de tensões e correntes no circuito do rotor. Como
essa indução é feita por uma ação de transformação, o circuito equivalente será muito
semelhante ao circuito equivalente de um transformador.
9
Para chegarmos ao circuito equivalente final por fase de um motor de indução, é
necessário que a parte do rotor no modelo seja referida para o lado do estator. Nos ensaios
propostos no Capitulo 3, os parâmetros do rotor referidos ao estator podem ser obtidos
diretamente.
O circuito equivalente por fase do motor de indução é apresentado na Figura 4, na
qual:
• Vs - Tensão nos terminais do estator;
• Vg – Tensão de entreferro;
• Is - Corrente no estator;
• Ir – Corrente no rotor;
• Rs – Resistencia do estator;
• R’r – Resistencia do rotor;
• Rc – Resistencia representativa das perdas no núcleo;
• Xs – Reatância do estator
• X’r – Reatância do rotor;
• Xm – Reatância de magnetização;
• S – Escorregamento.

10
Figura 4 – Circuito equivalente por fase de um motor de indução.
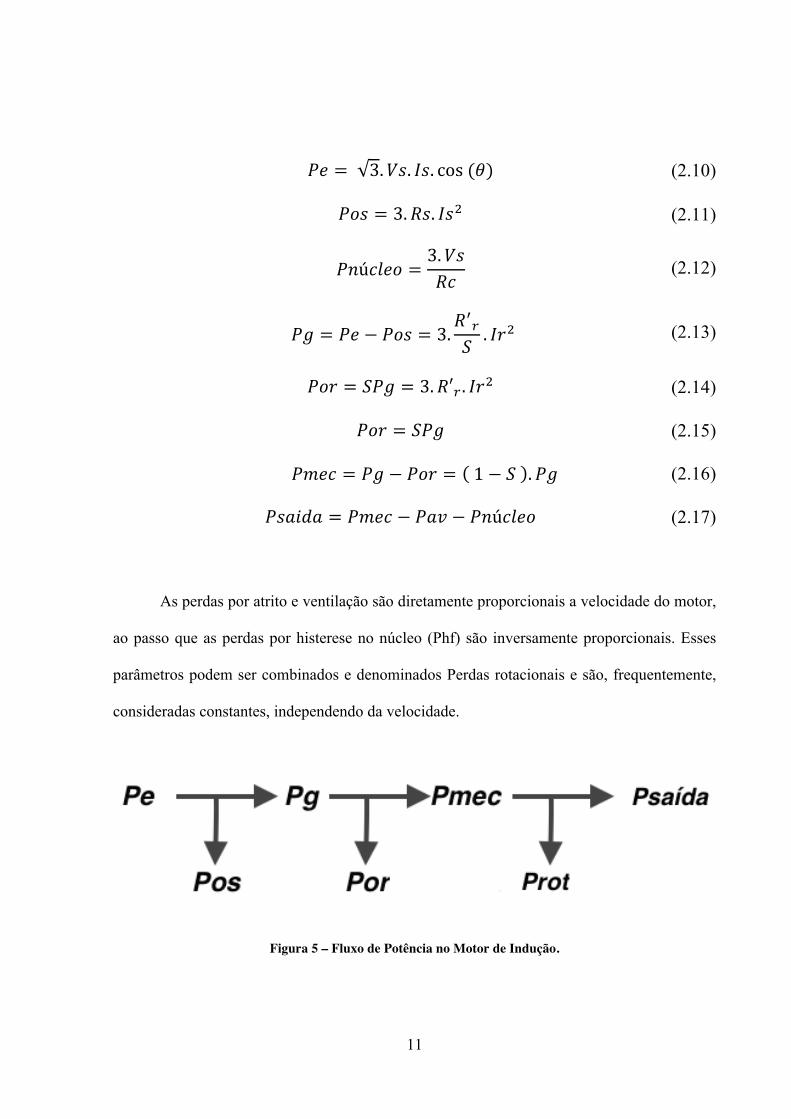
2.2.5 Fluxo de potencia
A potência de entrada (Pe) de um motor de indução é na forma de tensões e correntes
trifásicas. As primeiras perdas encontradas na maquina são as perdas nos enrolamentos de
cobre do estator (Pos). Então, certa quantidade de potencia é perdida por histerese e correntes
parasitas (Pnúcleo). As perdas no núcleo nem sempre aparecem nos diagramas nessa ordem,
pois elas são provenientes, tanto do estator quanto do rotor. Entretanto, como a velocidade
relativa do campo girante sobre a superfície do rotor é pequena, as perdas no núcleo do rotor
são pequenas se comparadas às do estator. As perdas no núcleo são representadas pelo resistor
Rc no circuito equivalente. A potência restante nesse ponto é a chamada potência de
entreferro (Pg), que é transferida entre o estator e o rotor. Após a potencia ser transferida para
o rotor, ela sofre as perdas referentes ao cobre do mesmo (Por) e o restante é convertido em
potência mecânica (Pmec). Por fim, as perdas por atrito e ventilação (Pav) são subtraídas. A
potência final é a potencia de saída do motor (Psaída). O diagrama do fluxo de potencia de
um motor de indução está representado na Figura 5.
11
𝑃𝑒 = 3.𝑉𝑠. 𝐼𝑠. cos (𝜃) (2.10)
𝑃𝑜𝑠 = 3.𝑅𝑠. 𝐼𝑠! (2.11)
𝑃𝑛ú𝑐𝑙𝑒𝑜 =3.𝑉𝑠𝑅𝑐
(2.12)
𝑃𝑔 = 𝑃𝑒 − 𝑃𝑜𝑠 = 3.𝑅!!𝑆. 𝐼𝑟! (2.13)
𝑃𝑜𝑟 = 𝑆𝑃𝑔 = 3.𝑅′! . 𝐼𝑟! (2.14)
𝑃𝑜𝑟 = 𝑆𝑃𝑔 (2.15)
𝑃𝑚𝑒𝑐 = 𝑃𝑔 − 𝑃𝑜𝑟 = 1 − 𝑆 .𝑃𝑔 (2.16)
𝑃𝑠𝑎𝑖𝑑𝑎 = 𝑃𝑚𝑒𝑐 − 𝑃𝑎𝑣 − 𝑃𝑛ú𝑐𝑙𝑒𝑜 (2.17)
As perdas por atrito e ventilação são diretamente proporcionais a velocidade do motor,
ao passo que as perdas por histerese no núcleo (Phf) são inversamente proporcionais. Esses
parâmetros podem ser combinados e denominados Perdas rotacionais e são, frequentemente,
consideradas constantes, independendo da velocidade.
Figura 5 – Fluxo de Potência no Motor de Indução.
12
2.3 Operação como Gerador
Como gerador, a máquina de indução tem diversas limitações. Uma delas é o fato de
não ser capaz de fornecer energia reativa para uma carga indutiva, tal como um motor ou um
transformador, nem para si próprio. De fato, a máquina consome reativo. Quando o gerador
de indução está operando no sistema interligado, a potência reativa é proveniente do próprio
sistema. Entretanto, quando opera em um sistema isolado faz-se necessário que uma fonte
externa de potência reativa, que seja capaz de manter o campo magnético no estator, seja
ligada permanentemente a ela. Normalmente, é escolhida como fonte externa um banco de
capacitores, com capacitância capaz de dar inicio ao processo de partida e de manter a
operação em carga.
É importante ressaltar que os conceitos abordados na operação da máquina como
motor podem ser aplicados na operação como gerador, porém, levando-se em consideração
que a potência de entrada é a potencia mecânica e a potencia elétrica é, agora, a potencia de
saída.
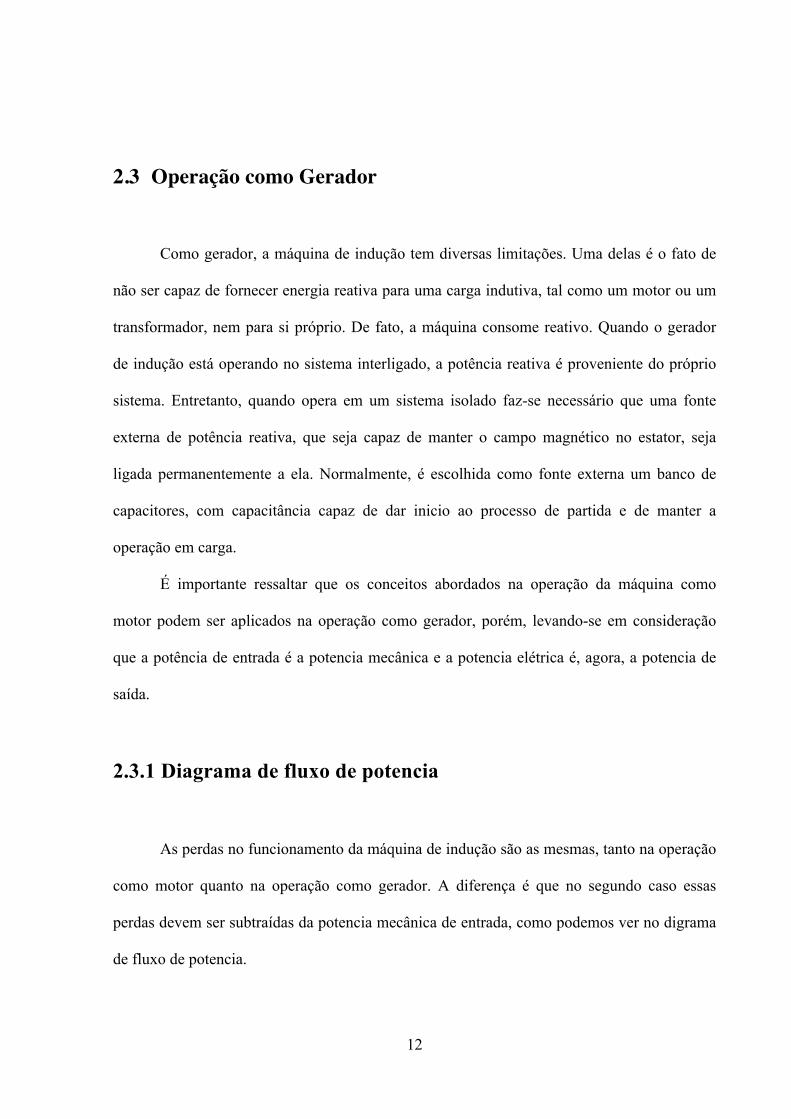
2.3.1 Diagrama de fluxo de potencia
As perdas no funcionamento da máquina de indução são as mesmas, tanto na operação
como motor quanto na operação como gerador. A diferença é que no segundo caso essas
perdas devem ser subtraídas da potencia mecânica de entrada, como podemos ver no digrama
de fluxo de potencia.
13
Figura 6 – Fluxo de Potência no Gerador de Indução (CHAPALLAZ, 1992).
2.3.2 Descrição do fenômeno de auto-excitação
Quando uma fonte de energia externa aciona o eixo do rotor de uma máquina de
indução, o magnetismo residual do próprio rotor induz uma pequena forca eletromotriz nos
enrolamentos do estator, na frequência proporcional a velocidade do rotor. Sob essas
condições, o banco de capacitores no terminal do estator é responsável por gerar um avanço
na corrente. O valor de capacitância deve ser dimensionado para que essa corrente seja capaz
de aumentar o fluxo existente no entreferro, de forma a resultar numa maior tensão gerada,
maior corrente de excitação drenada pelos capacitores, maior fluxo de entreferro e assim por
diante, até que o terminal da máquina alcance seu valor final. O crescimento dessa tensão se
dá em degraus, num fenômeno semelhante ao escorvamento na maquina de corrente contínua.
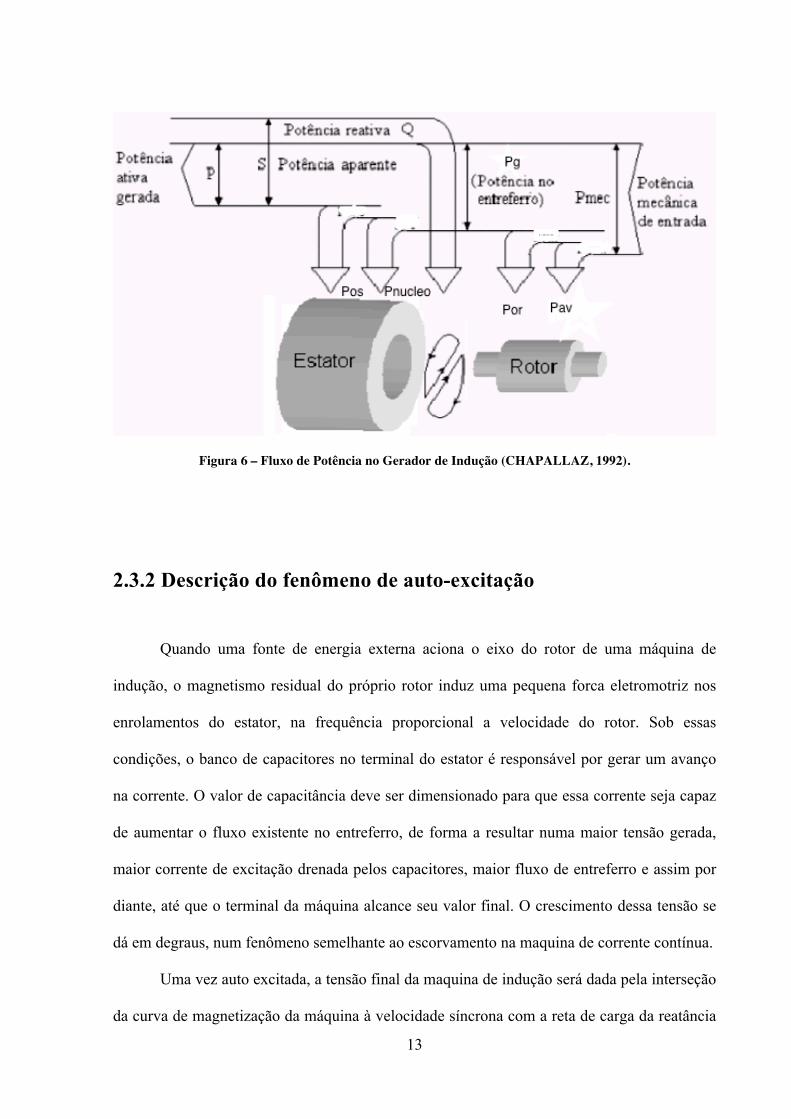
Uma vez auto excitada, a tensão final da maquina de indução será dada pela interseção
da curva de magnetização da máquina à velocidade síncrona com a reta de carga da reatância
14
capacitiva do equivalente monofásico do banco de capacitores.. A reta de carga que determina
a capacitância mínima para excitação, ou seja, reatância capacitiva máxima, é a linha de
entreferro. A reta que determina a reatância capacitiva mínima, ou seja, a capacitância
máxima de excitação, que está representada na Figura 7 por Cmax, também determina a
região de saturação da maquina.
Figura 7 – Retas que determinam a faixa de capacitância
Fazendo uma análise da Figura 7, pode-se perceber que para a geração ocorrer, é
necessário que o valor da reatância capacitiva seja, pelo menos, igual a tangente da linha de
entreferro. Isso significa ser menor ou igual a reatância de magnetização não saturada da
15
máquina. Com isso, conclui-se que, sob estas condições, um gerador de indução sempre irá
operar com seu circuito magnético saturado.
Na operação como motor, a tensão aplicada determina o ponto de operação na curva
de magnetização, diferente da operação como gerador, na qual se torna conveniente fixar o
ponto operativo não muito próximo a linha de entreferro, pela possibilidade da perda da auto-
excitação em função de uma possível variação de carga, velocidade, dentre outros.
2.3.3 Magnetismo Residual da máquina
O magnetismo residual do rotor pode ser extinto pela retirada dos capacitores quando
o gerador estiver em carga, por um curto-circuito ou por uma grande sobrecarga, que cause
uma violenta queda de tensão. No entanto, esse magnetismo pode ser restituído com a
abordagem de métodos, tais como:
• Acionamento da maquina como motor;
• Descarga de um capacitor carregado através do enrolamentos do estator,
enquanto a máquina está operando;
• Ligação de uma bateria aos terminais da máquina por alguns instantes, com a
mesma em repouso.
A ligação da bateria é o método mais prático, em se tratando de um gerador isolado.
2.3.4 Desenvolvimento do modelo utilizado

16
O objetivo desse modelo para o gerador de indução é alimentar uma carga resistiva,
com auxilio de uma associação de capacitores nos seus terminais, necessários a sua auto-
excitação. Para isso o circuito equivalente proposto deve ter todos os parâmetros definidos na
frequência síncrona. Sabemos que as reatâncias variam com a frequência, portanto as
reatâncias indutivas devem aparecer multiplicadas por uma fração da frequência base fpu e a
reatância capacitiva, dividida pela mesma fração, com intuito de se obter as correções
necessárias para a análise. Com isso, se faz necessário uma nova expressão para o
escorregamento em função da frequência de saída.
𝑓!" =
𝑓𝑓𝑠
= 𝜔𝜔𝑠
(2.18)
Partindo da definição de escorregamento:
𝑆 =
𝜔 − 𝜔𝑟𝜔
= !!"− !"
!"!!"
(2.19)
𝑆 =
𝑓!" − !"!"
𝑓!" (2.20)
𝜔𝑟𝜔𝑠
= 𝛿 (2.21)
17
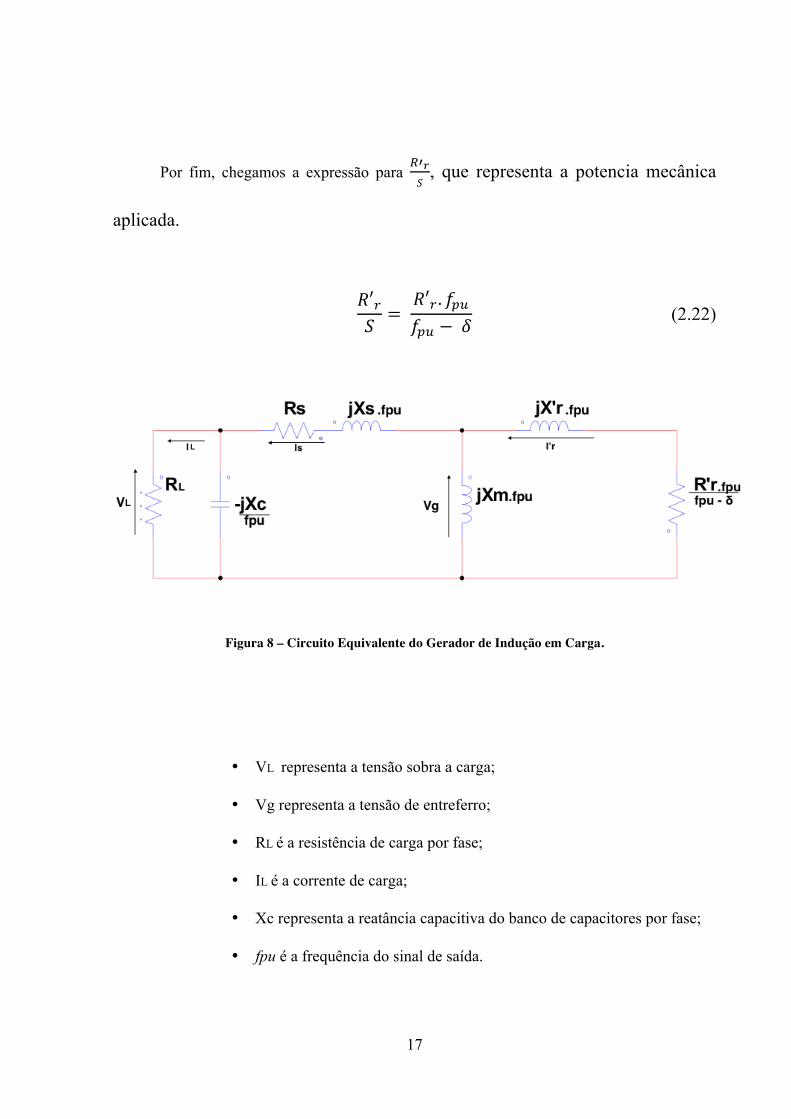
Por fim, chegamos a expressão para !!!𝑆
, que representa a potencia mecânica
aplicada.
𝑅′!𝑆=
𝑅′! . 𝑓!"𝑓!" − 𝛿
(2.22)
Figura 8 – Circuito Equivalente do Gerador de Indução em Carga.
• VL representa a tensão sobra a carga;
• Vg representa a tensão de entreferro;
• RL é a resistência de carga por fase;
• IL é a corrente de carga;
• Xc representa a reatância capacitiva do banco de capacitores por fase;
• fpu é a frequência do sinal de saída.
18
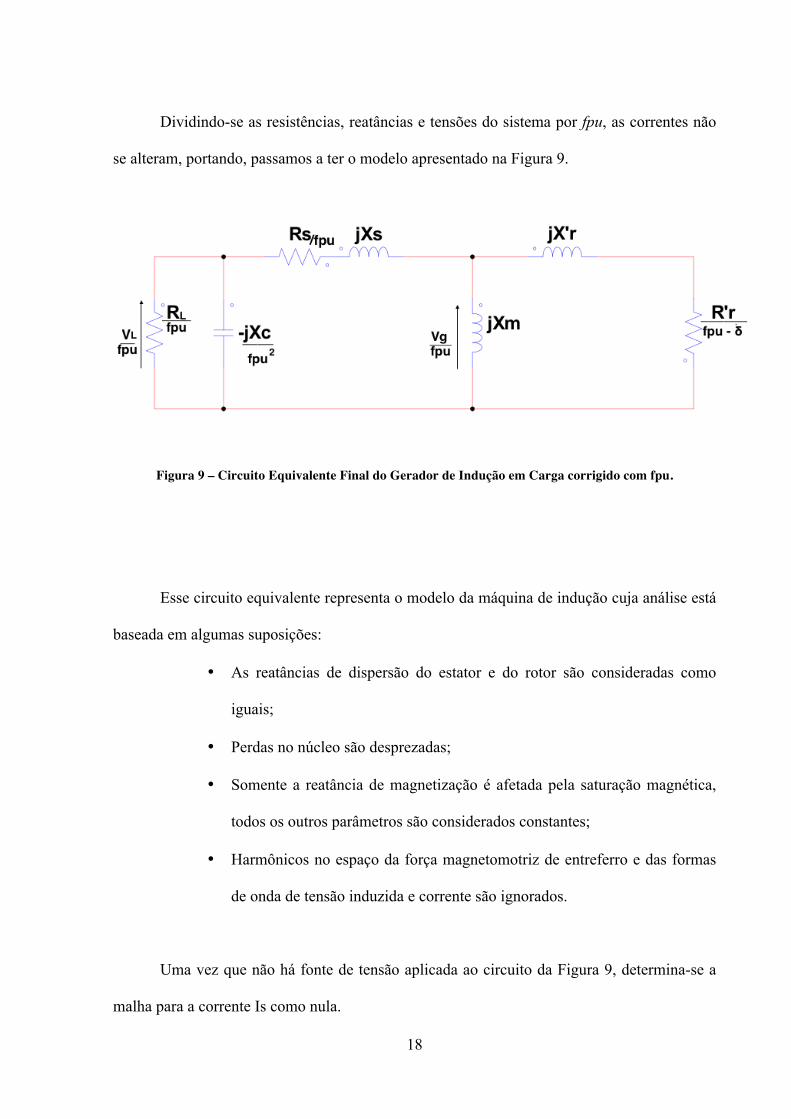
Dividindo-se as resistências, reatâncias e tensões do sistema por fpu, as correntes não
se alteram, portando, passamos a ter o modelo apresentado na Figura 9.
Figura 9 – Circuito Equivalente Final do Gerador de Indução em Carga corrigido com fpu.
Esse circuito equivalente representa o modelo da máquina de indução cuja análise está
baseada em algumas suposições:
• As reatâncias de dispersão do estator e do rotor são consideradas como
iguais;
• Perdas no núcleo são desprezadas;
• Somente a reatância de magnetização é afetada pela saturação magnética,
todos os outros parâmetros são considerados constantes;
• Harmônicos no espaço da força magnetomotriz de entreferro e das formas
de onda de tensão induzida e corrente são ignorados.
Uma vez que não há fonte de tensão aplicada ao circuito da Figura 9, determina-se a
malha para a corrente Is como nula.

19
𝐼! .𝑍!" = 0 (2.23)
Onde, Zeq representa a impedância equivalente do circuito e é dada pela associação a
seguir.
𝑍!" = 𝑅′!
𝑓!" − 𝛿+ 𝑗𝑋′! // 𝑗𝑋! + 𝑗𝑋! +
𝑅!𝑓!"
// −𝑗𝑋!𝑓!"!
// 𝑅!𝑓!"
(2.24)
A expansão desta resulta na seguinte expressão:
𝑍!" =
! !!!!!!"!
!!!!"
− !"!!!"!
+ 𝑅!𝑓!"
+ 𝑗𝑋! + 𝑗𝑋!
!!!!!"! !
+ 𝑗𝑋′!!!!
!!"! !+ 𝑗 𝑋! + 𝑋′!
(2.25)
A seguir, pode-se concluir que Zeq deve ser igual a zero, uma vez que, em regime
permanente, sabe-se que Is é diferente de zero. Para que Zeq seja nula, se faz necessário que
tanto a parte real quanto a parte imaginaria se anulem, nos levando às seguintes equações que
devem ser satisfeitas simultaneamente.
𝑅𝑒 𝑍!" = 0𝐼𝑚 𝑍!" = 0

20
Assim, considerando-se
𝑅! = 𝑅′! = 𝑅
𝑋! = 𝑋′! = 𝑋
e desenvolvendo-se a equação (2.25) ( vide Apêndice A), obtém-se:
• Parte real de Zeq:
𝑅𝑒 𝑍!" = −2𝑋𝑅!𝑋! − 𝑋!𝑅! 𝑓!"!
+ 2𝛿𝑋𝑅!𝑋! + 𝛿𝑅!𝑋! 𝑓!"! + 𝑋! 2𝑅 + 𝑅! 𝑋!
+ 𝑋!𝑋 2𝑅 + 𝑅! + 𝑅!𝑅! 𝑓!"
+ −𝛿𝑋! 𝑅! + 𝑅 𝑋! − 𝛿𝑋!𝑋 𝑅 + 𝑅! = 0 (2.26)
• Parte imaginária de Zs:
𝐼𝑚 𝑍!" = 2𝑋𝑋! + 2𝑅𝑅! 𝑋! + 2𝑅!𝑋𝑅 + 𝑋!𝑋! 𝑓!"!
+ −𝛿 2𝑋!𝑋 + 𝑅𝑅! 𝑋!
− 𝛿 𝑅𝑅! + 𝑋!𝑋 𝑋 𝑓!" + 𝑋!𝑅 𝑅! + 𝑅 = 0 (2.27)
21
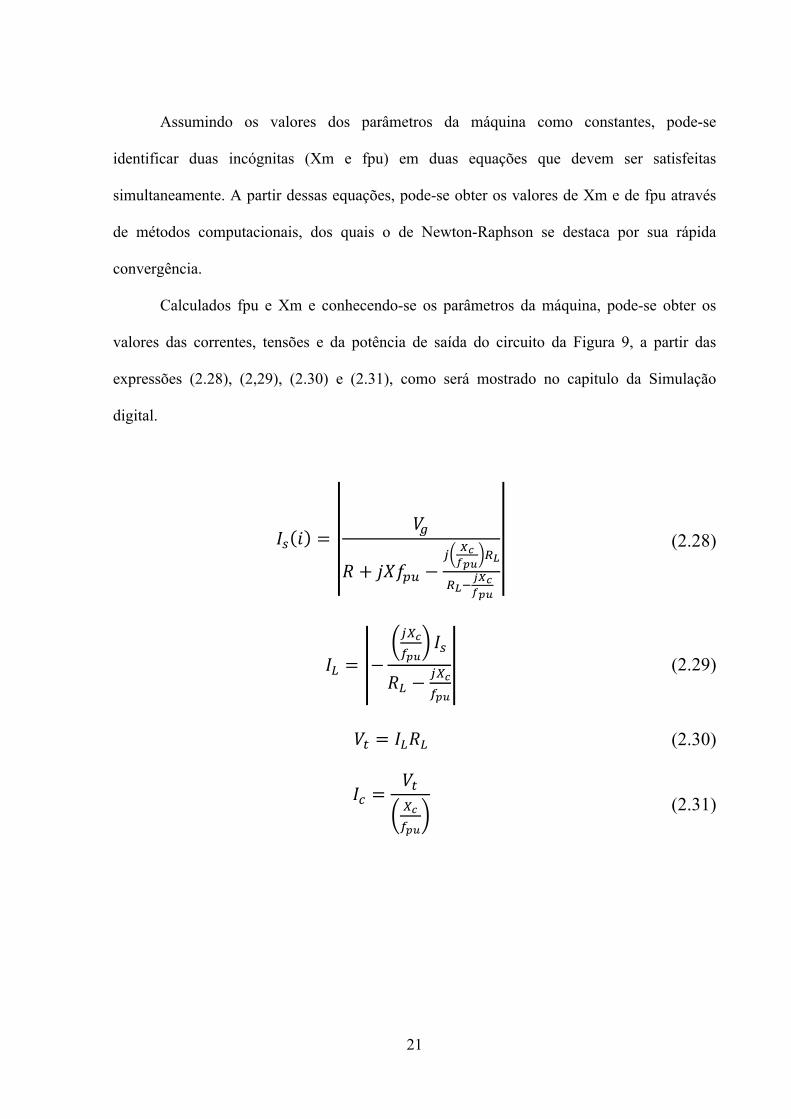
Assumindo os valores dos parâmetros da máquina como constantes, pode-se
identificar duas incógnitas (Xm e fpu) em duas equações que devem ser satisfeitas
simultaneamente. A partir dessas equações, pode-se obter os valores de Xm e de fpu através
de métodos computacionais, dos quais o de Newton-Raphson se destaca por sua rápida
convergência.
Calculados fpu e Xm e conhecendo-se os parâmetros da máquina, pode-se obter os
valores das correntes, tensões e da potência de saída do circuito da Figura 9, a partir das
expressões (2.28), (2,29), (2.30) e (2.31), como será mostrado no capitulo da Simulação
digital.
𝐼! 𝑖 =𝑉!
𝑅 + 𝑗𝑋𝑓!" −! !!!!"
!!
!!!!!!!!"
(2.28)
𝐼! = −
!!!!!"
𝐼!
𝑅! −!!!!!"
(2.29)
𝑉! = 𝐼!𝑅! (2.30)
𝐼! =𝑉!!!!!"
(2.31)

22
3 Capítulo 3
Ensaios - Métodos de cálculo e resultados experimentais
Com o objetivo de estudar o comportamento da maquina de indução auto-excitada por
capacitores para diferentes condições de funcionamento, foram realizados ensaios a vazio e de
rotor bloqueado, para a obtenção dos parâmetros do circuito equivalente e da curva de
magnetização.
A partir desses dados, foi possível fazer uma simulação digital da performance da
máquina para diversas condições de carga.
Então, foi realizado o ensaio da máquina como gerador de indução auto-excitado,
buscando comprovar as respostas obtidas na simulação digital.
Os ensaio foram realizado no Laboratório de Máquinas, localizado no Bloco I do
Centro de Tecnologia da Universidade Federal do Rio de Janeiro.

23
3.1 Características da maquina de indução utilizada
Tabela 1 – Informações da placa da maquina
Fabricante General Eletric (GE)
Modelo B5K0100A16 Nº GE39356
Potência 1 CV
Tensão Nominal 220/380/440/760
Corrente Nominal 3,3/1,9/1,65/0,96 -‐ 3,8/2,2/1,9/1,1
Frequência 60/50 Hz
Fator de Sobrecarga 1,25/1,00
Tipo K
Carcaça 100L
Categoria B
Código K
Regime Contínuo
Classe de isolamento A
Na Tabela 1 são apresentados os dados contidos na placa do máquina. Nas Figuras 9 e
10 são mostradas as ligações possíveis nos terminais da mesma.
24
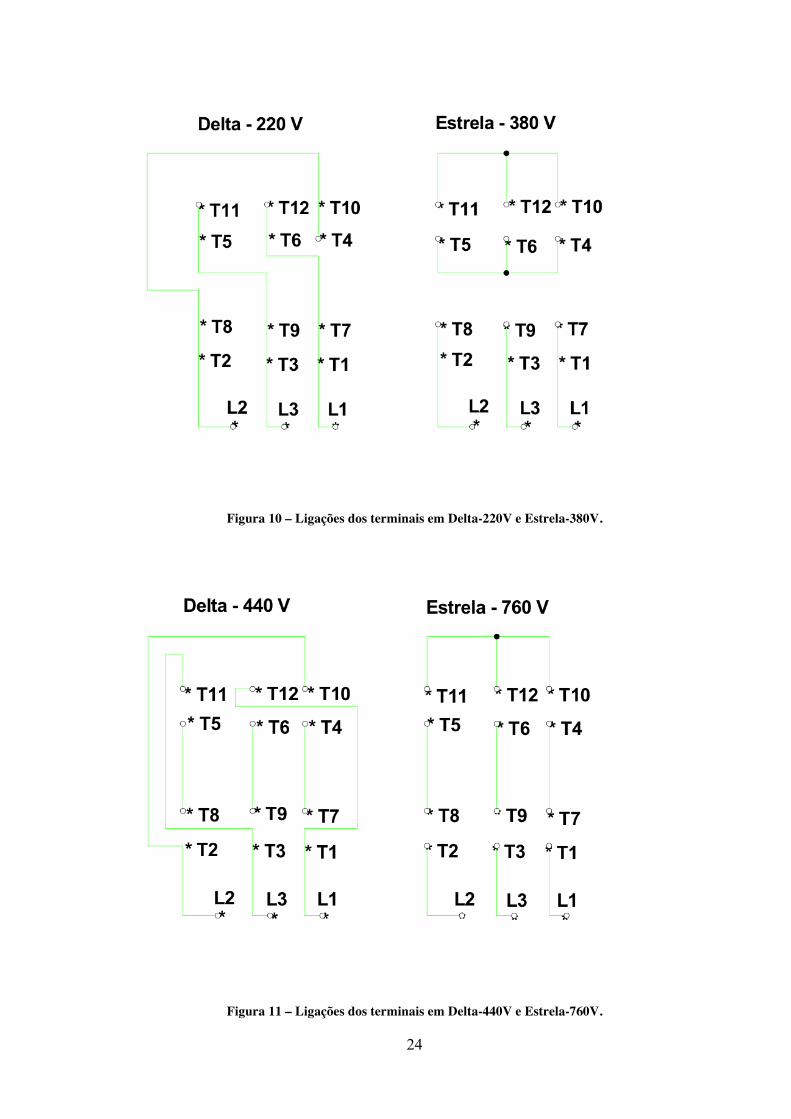
Figura 10 – Ligações dos terminais em Delta-220V e Estrela-380V.
Figura 11 – Ligações dos terminais em Delta-440V e Estrela-760V.
25
A conexão usada nos ensaios foi a Delta – 220 V, já que a carga resistiva utilizada no
ensaio principal é constituída por lâmpadas de 24 W, 60W, 100W, 200W e 500W, todas de
220 V.
3.2 Ensaio de Rotor bloqueado à corrente nominal
Este ensaio tem como objetivo determinar as resistências e reatâncias dos
enrolamentos do estator e do rotor.
3.2.1 Material utilizado
• Máquina de Indução;
• Auto Transformador Variável Trifásico (0-440)V;
• Gossen-Metrawatt MAVOWATT 30.
O auto transformador se faz necessário para o ajuste da tensão que deve ser aplicada
nos terminais da máquina.
O Gossen- Metrawatt MAVOWATT 30 é um instrumento de monitoramento/medição
de qualidade de energia, com oito terminais disponíveis para mensurar diversos tipos de
circuitos e grandezas de forma portátil e prática. Esse aparelho é capaz de monitorar, gravar e
mostrar dados de quatro canais de tensão e quatro canais de corrente simultaneamente, além
26
de grandezas que dependem dessas, como o fator de potência e a potência (aparente, ativa e
reativa).
3.2.2 Procedimento experimental
O rotor deve ser mantido parado e uma tensão pequena deve ser aplicada nos terminais
do estator. Essa tensão inicial aplicada deve ser bem menor do que a tensão nominal, evitando
que a corrente do estator exceda seu valor nominal. Esse valor baixo de tensão é justificado,
uma vez que, por estar travado, o rotor enxerga uma velocidade de fluxo igual a velocidade
vista do estator. Portanto, o escorregamento é unitário, o que faz que a impedância de entrada
do circuito equivalente seja muito baixa.
Posteriormente, essa tensão aplicada ao estator é ajustada, na medida em que são feitas
as medições necessárias para o cálculo dos parâmetros, de modo que a corrente do estator seja
igual ao seu valor nominal, sendo esse o ultimo ponto a ser medido.
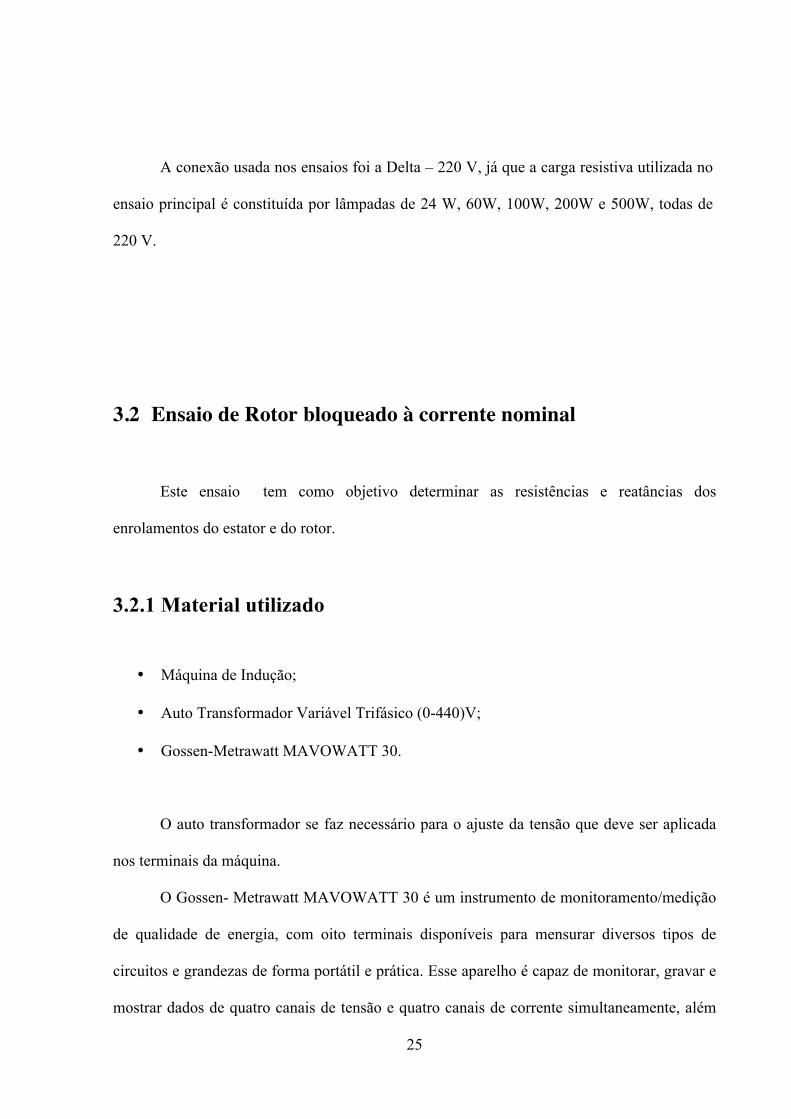
Na figura a seguir são mostradas as conexões do Mavowatt 30 para medições na
máquina ligada em delta.
Figura 12 –Conexões do Mavowatt 30 para máquina ligada em delta.
27
3.2.3 Valores Medidos
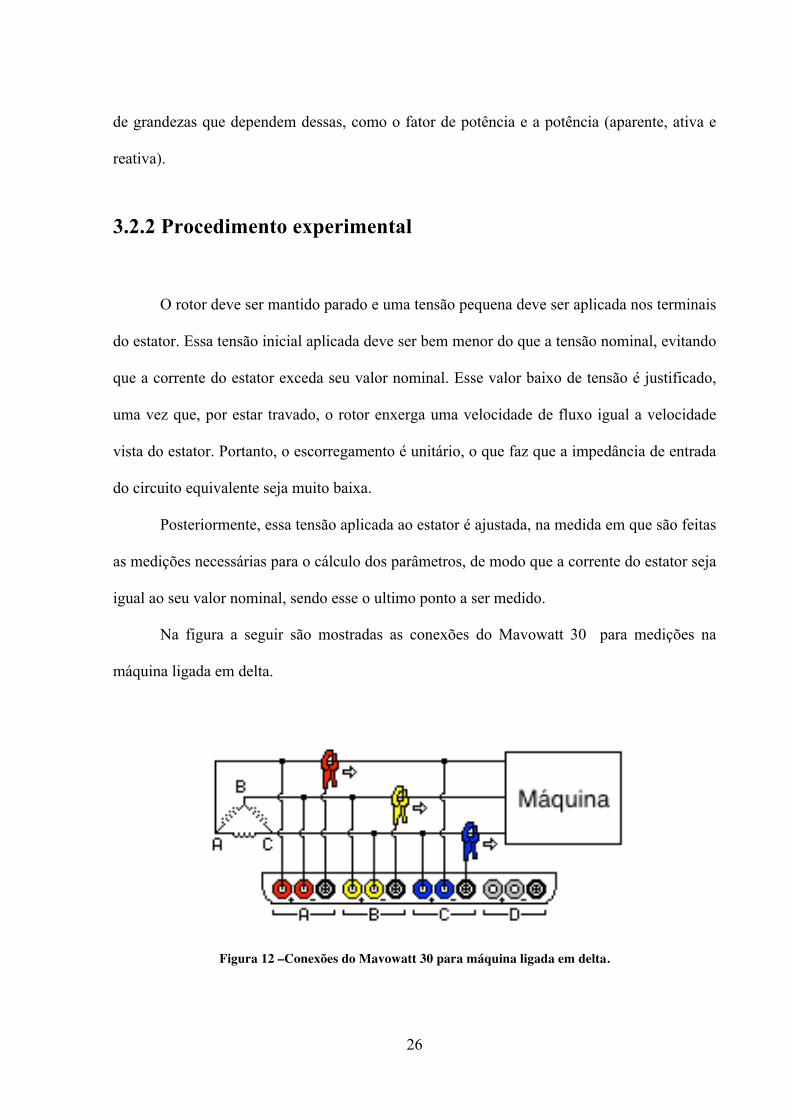
A tabela 2 apresenta os valores de tensão e corrente relativos a cada fase, além da
potência ativa trifásica em quilowatts.
Tabela 2 – Valores de cada fase de tensão e corrente.
Tensão de Fase [V] Corrente no Estator [A] Ptotal [kW]
A B C A B C
8,802 8,949 8,918 0,809 0,8357 0,8054 0,007861
11,168 11,465 11,212 1,2003 1,233 1,1771 0,01541
13,396 13,516 13,499 1,5737 1,5826 1,5451 0,028081
18,93 18,85 18,778 2,5049 2,4968 2,4174 0,07623
23,56 23,565 23,512 3,308 3,312 3,203 0,12884
24,308 24,205 24,224 3,426 3,426 3,365 0,13474
Para o cálculo dos parâmetros, é feito uma média dos valores de tensão e corrente por
fase. Além dos valores médios, a tabela 3 ainda apresenta a coluna 3.(Imédia)², com valores
que serão necessários para o calculo da resistência, de acordo com a expressão (3.1).
Tabela 3 – Valores médios por fase.
Vmédia Imédia (Imédia)² 3.(Imédia)² Ptotal [kW]
8,88967 0,81670 0,66700 2,00100 0,00786
11,28167 1,20347 1,44833 4,34500 0,01541
13,47033 1,56713 2,45591 7,36772 0,02808
18,85267 2,47303 6,11589 18,34768 0,07623
23,54566667 3,274333333 10,72126 32,16378 0,12884
24,24566667 3,405666667 11,59857 34,79570 0,13474
28
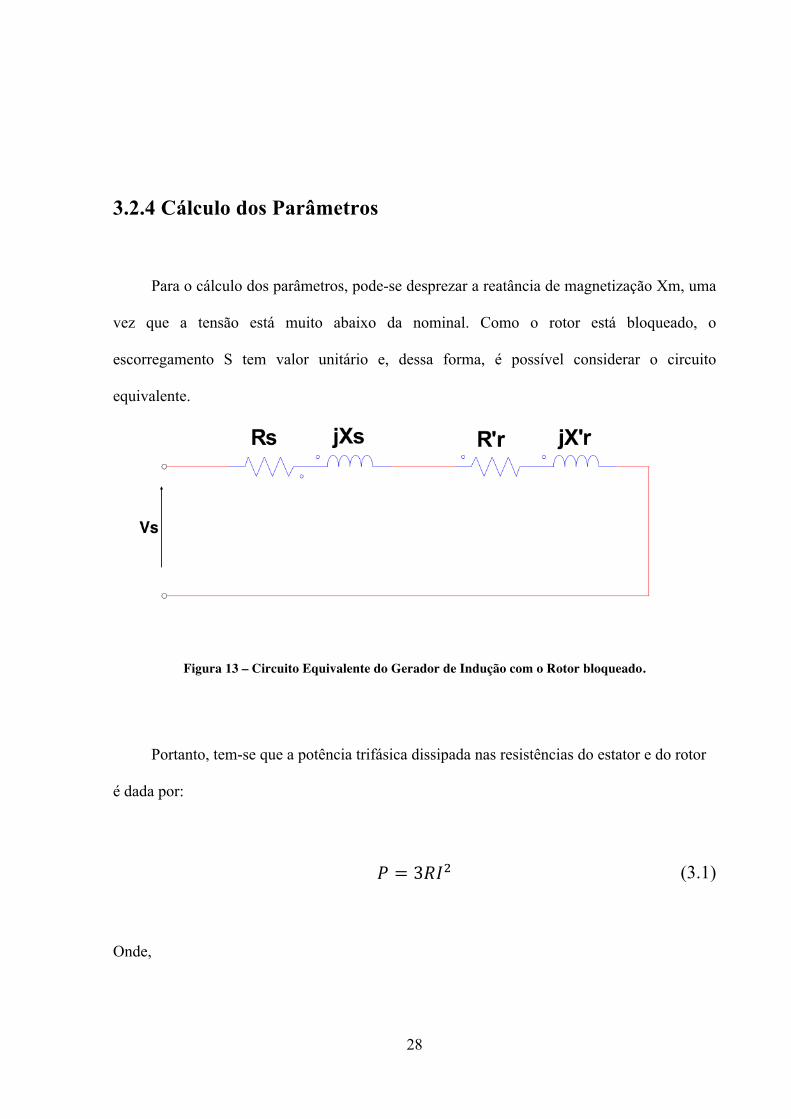
3.2.4 Cálculo dos Parâmetros
Para o cálculo dos parâmetros, pode-se desprezar a reatância de magnetização Xm, uma
vez que a tensão está muito abaixo da nominal. Como o rotor está bloqueado, o
escorregamento S tem valor unitário e, dessa forma, é possível considerar o circuito
equivalente.
Figura 13 – Circuito Equivalente do Gerador de Indução com o Rotor bloqueado.
Portanto, tem-se que a potência trifásica dissipada nas resistências do estator e do rotor
é dada por:
𝑃 = 3𝑅𝐼! (3.1)
Onde,

29
𝑅 = 𝑅𝑠 + 𝑅′𝑟 (3.2)
Com isso, pode-se calcular o valor de R para cada valor de tensão trifásica e de
corrente de excitação, conforme feito na Figura 11.
Figura 14 – Reta de Resistência.
Com o auxilio do Matlab, foi usado o comando Polyfit para ajustar uma reta que
melhor atende a todos os valores experimentais. O coeficiente angular dessa reta ajustada
consiste no valor de resistência por fase R, logo:

30
𝑅 =𝑃3. 𝐼!
= 3,9285 Ω
Assumindo como verdadeira a hipótese de que as resistências, do rotor e do estator,
são iguais, podemos obter os valores de Rs e de Rr.
𝑅! = 𝑅′! = 1,9643 𝛺
Os valores em p.u. são calculado a partir da impedância base.
𝑍!"#$ =
𝑉!"#$!
𝑆!"#! (3.3)
𝑍!"#$ = 220!
736 = 65,7609 𝛺
𝑅!(𝑝.𝑢. ) = 𝑅′!(𝑝.𝑢. ) =𝑍!"#$𝑍!"#$
= 0,02987 𝑝.𝑢.
Outra afirmativa que se pode fazer do circuito equivalente é:
𝑍 =
𝑉𝐼
(3.4)
Portanto, é possível a obtenção da impedância a cada ponto de tensão e corrente
medidos, como na Figura 12. O comando Polyfit do Matlab foi novamente usado para ajustar
a reta, cujo coeficiente angular representa o valor da Impedância por fase Z.
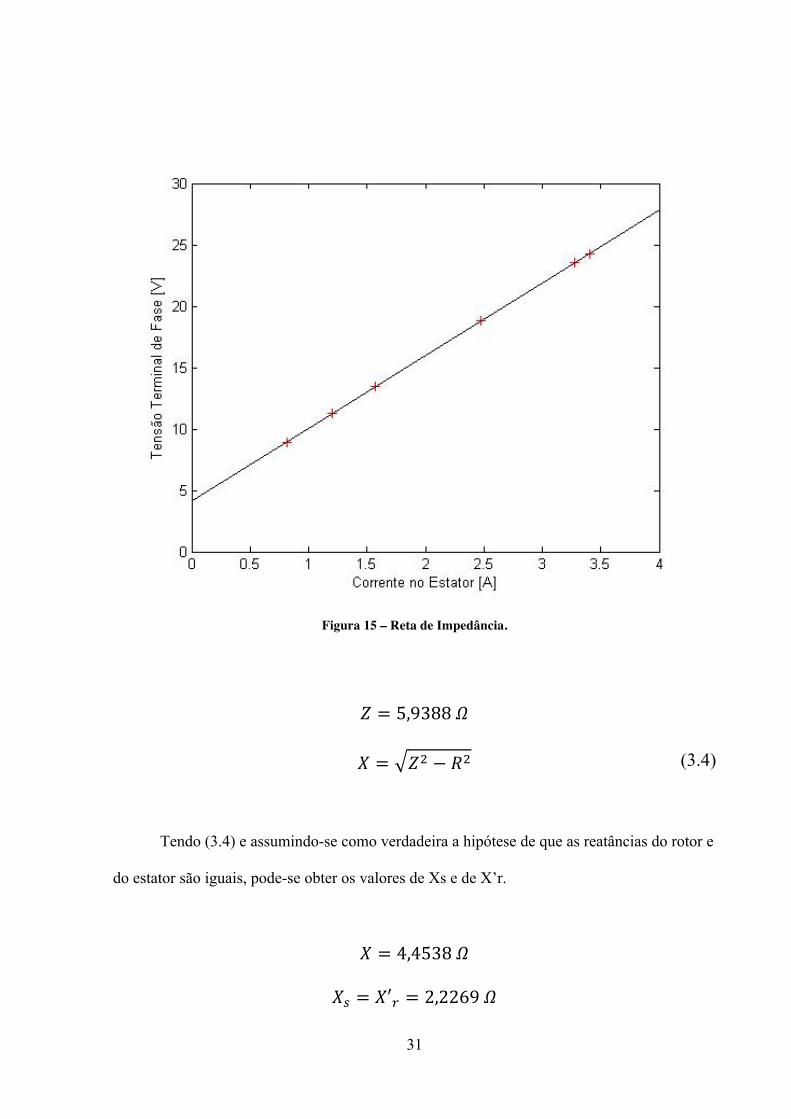
31
Figura 15 – Reta de Impedância.
𝑍 = 5,9388 𝛺
𝑋 = 𝑍! − 𝑅! (3.4)
Tendo (3.4) e assumindo-se como verdadeira a hipótese de que as reatâncias do rotor e
do estator são iguais, pode-se obter os valores de Xs e de X’r.
𝑋 = 4,4538 𝛺
𝑋! = 𝑋′! = 2,2269 𝛺
32
𝑋! 𝑝.𝑢. = 𝑋′! 𝑝.𝑢. =𝑍!"#$𝑍!"#$
= 0,03386 𝑝.𝑢.
• Resultados obtidos:
Tabela 4 – Valores das reatâncias e resistências do estator e do rotor.
𝑅𝑠 = 𝑅′𝑟 = 1,9643 𝛺 = 0,02987 𝑝.𝑢.
𝑋𝑠 = 𝑋′𝑟 = 2,2269 𝛺 = 0,03386 𝑝.𝑢.
3.3 Ensaio em Vazio
Este ensaio tem como objetivo gerar uma curva que relacione a tensão terminal da
máquina com a sua corrente estatórica, na frequência síncrona. Dessa curva, será feita a
análise da faixa de capacitores adequados a excitação da máquina.
Ainda dessa relação, pode-se obter a curva de magnetização da maquina.
De posse da curva de magnetização, deve-se obter a relação entre a tensão de
entreferro e a reatância de magnetização, que será utilizada no estudo do modelo da máquina
através da simulação digital.
33
3.3.1 Material Utilizado
• Máquina de Indução;
• Motor de Corrente contínua com resistência de campo variável;
• Auto Transformador Variável Trifásico (0-440)V;
• Gossen-Metrawatt MAVOWATT 30.
3.3.2 Procedimento Experimental
Este ensaio consiste em alimentar os terminais motor de indução através de uma fonte
variável de tensão e fazer as medições de corrente e fator de potência para uma faixa de
tensão entre zero e aproximadamente 130% da nominal.
A variação da tensão foi feita a partir de um auto transformador variável, inserido
entre a rede e a maquina.
Primeiramente, o motor foi acionado em vazio, ou seja, sem carga alguma acoplada
ao rotor. A tensão foi ajustada para uma corrente de aproximadamente 130% da nominal e a
partir dai, decrescida ponto a ponto ate a tensão zero. Fazendo as medições dos pontos de
tensão e corrente, pôde-se observar que para valores pequenos desses pontos, o rotor perde
velocidade, até parar. Isso se deve ao fato da potencia elétrica de entrada começar a ser
“vencida” pelas perdas totais da maquina, ate que o rotor não seja mais capaz de girar. Isso
faz com que a curva V x I tenha uma grande distorção para valores pequenos.
Para corrigir esse problema, foi usado uma maquina de corrente continua com
velocidade fixada em 1800 rpm, acoplada ao eixo da maquina de indução. A velocidade deve
34
ser fixada nesse valor porque a maquina de indução é acionada a 60 Hz, produzindo um
campo girante a 1800 rpm. Dessa forma, no momento em que a potencia elétrica de entrada
da maquina de indução começa a perder para as perdas internas, a maquina CC passa a manter
a velocidade do rotor em 1800 rpm, eliminando o escorregamento, que aparecia anteriormente
nesses pontos.
Antes de acoplar as maquinas, foi feita uma observação dos sentidos de rotação de
cada uma, para que pudessem ser acionadas no mesmo sentido. Feito isso, a tensão foi
novamente ajustada em torno de 130% da nominal e os pontos medidos a cada decréscimo da
mesma, sendo que a cada ponto de medição a velocidade da máquina CC foi verificada e,
quando necessário, ajustada novamente a 1800 rpm.
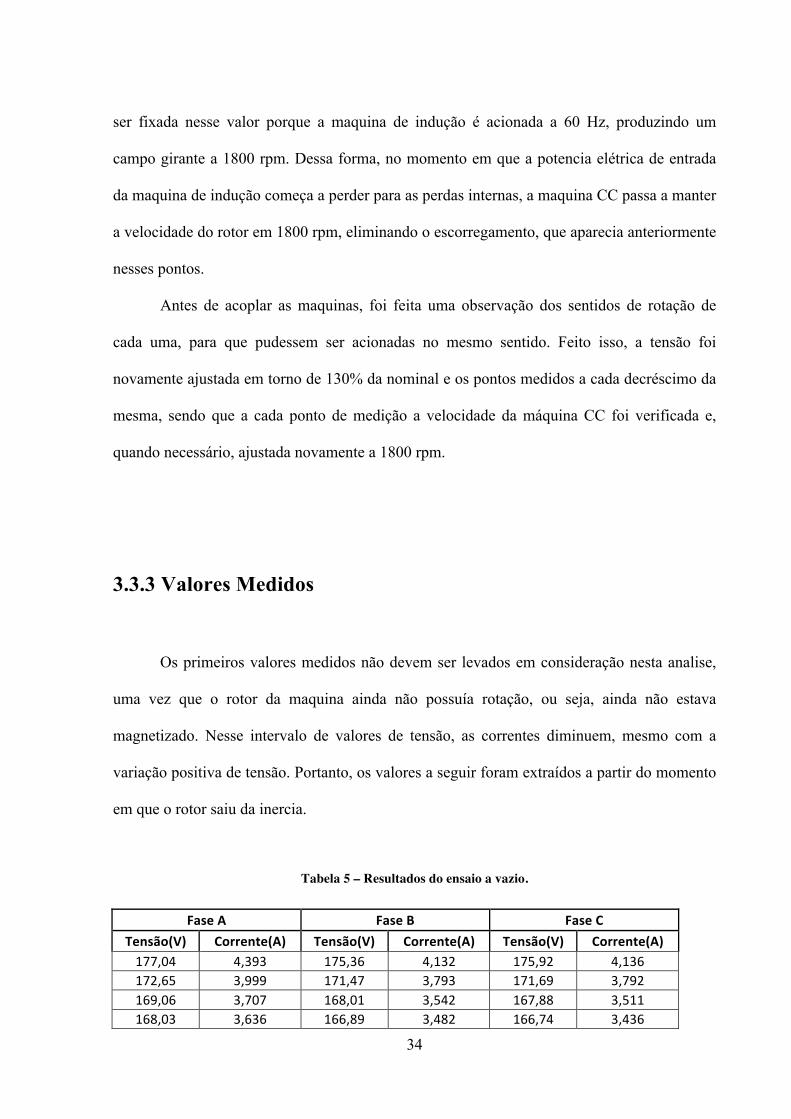
3.3.3 Valores Medidos
Os primeiros valores medidos não devem ser levados em consideração nesta analise,
uma vez que o rotor da maquina ainda não possuía rotação, ou seja, ainda não estava
magnetizado. Nesse intervalo de valores de tensão, as correntes diminuem, mesmo com a
variação positiva de tensão. Portanto, os valores a seguir foram extraídos a partir do momento
em que o rotor saiu da inercia.
Tabela 5 – Resultados do ensaio a vazio.
Fase A Fase B Fase C Tensão(V) Corrente(A) Tensão(V) Corrente(A) Tensão(V) Corrente(A) 177,04 4,393 175,36 4,132 175,92 4,136 172,65 3,999 171,47 3,793 171,69 3,792 169,06 3,707 168,01 3,542 167,88 3,511 168,03 3,636 166,89 3,482 166,74 3,436

35
166,48 3,544 165,17 3,372 164,81 3,297 160,85 3,201 159,39 2,9883 159,26 2,9736 154,9 2,861 153,37 2,6516 153,82 2,7263 151,05 2,6648 149,8 2,53 149,44 2,497 146,66 2,4721 145,48 2,3557 145,17 2,3403 144,15 2,3827 142,93 2,2651 142,72 2,265 137,31 2,1442 136,47 2,0698 136,71 2,1198 131,27 1,9978 130,31 1,9253 130,65 1,9747 127,29 1,9072 126,53 1,8681 126,16 1,8503 124,93 1,8659 124,06 1,8336 123,81 1,8198 120,23 1,7849 119,17 1,7289 119,2 1,7259 113,75 1,6741 112,74 1,6269 112,84 1,632 104,95 1,5146 104,14 1,4928 103,88 1,4792 101,34 1,4567 100,5 1,4361 100,39 1,4248 95,85 1,3827 94,99 1,3557 95,08 1,3486 88,89 1,2842 88,17 1,2556 88,35 1,2654 85,11 1,2364 84,47 1,2121 84,53 1,2141 81,54 1,1932 80,89 1,1685 80,99 1,1665 75,7 1,1072 74,98 1,0744 75,38 1,0958 68,23 1,0013 67,6 0,9745 68,18 1,0062 62,65 0,9177 62,15 0,9008 62,43 0,914 58,47 0,8581 57,98 0,8412 58,29 0,8577 52,07 0,7532 51,43 0,7371 52,03 0,7554 44,43 0,6487 44,02 0,6243 44,42 0,6389 38,79 0,5938 38,39 0,5822 38,62 0,5904 35,23 0,5436 34,84 0,5309 35,13 0,5423 31,059 0,4772 30,731 0,4669 31,049 0,4763 26,744 0,4047 26,528 0,4015 26,662 0,4046 24,42 0,3728 24,226 0,3687 24,309 0,3728 20,033 0,3068 19,684 0,29681 20,12 0,31305 13,997 0,26191 13,7 0,23812 14,183 0,26794 9,914 0,20151 9,738 0,19287 9,895 0,20241 7,851 0,16994 7,694 0,15991 7,894 0,17307 5,261 0,13356 5,14 0,12177 5,36 0,1361 3,237 0,09183 3,1454 0,0848 3,353 0,09901 0,9184 0,06822 1,0138 0,05869 0,7971 0,0654
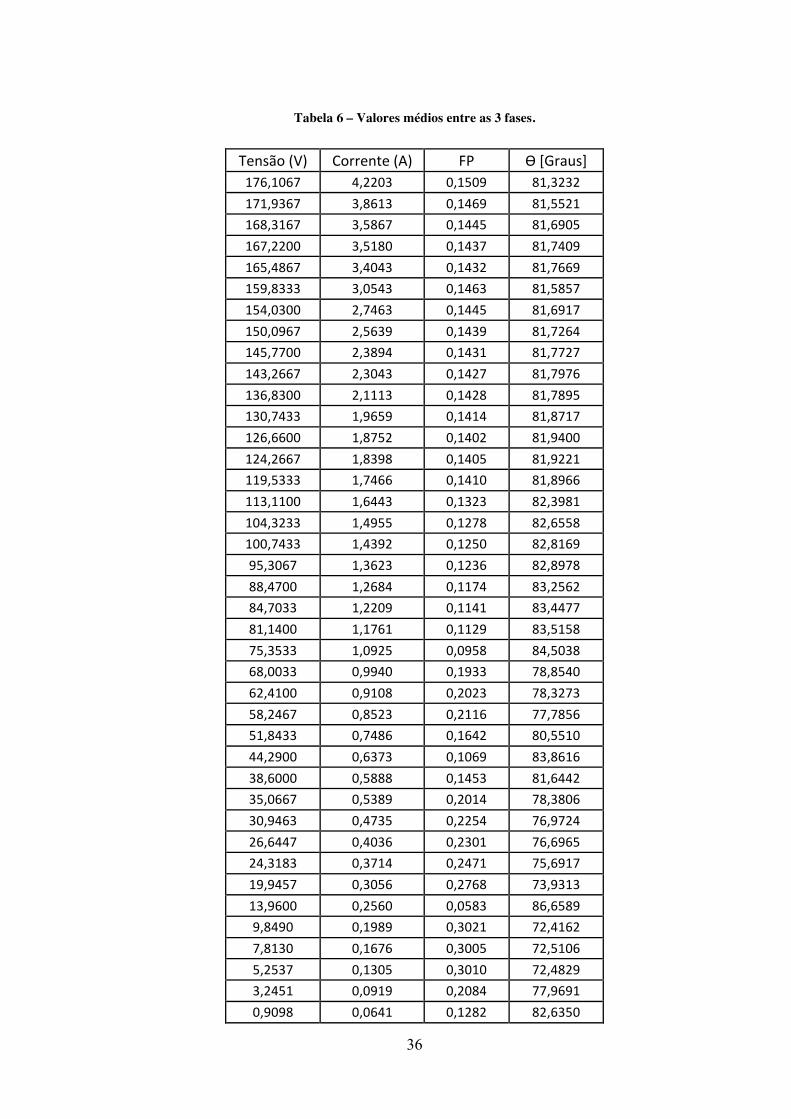
A tabela 6 apresenta os valores médios de tensão e corrente, além do fator de potencia
FP e do angulo 𝜃, calculado a partir do FP medido, ambos relativos ao fasor de corrente.
36
Tabela 6 – Valores médios entre as 3 fases.
Tensão (V) Corrente (A) FP Ɵ [Graus] 176,1067 4,2203 0,1509 81,3232 171,9367 3,8613 0,1469 81,5521 168,3167 3,5867 0,1445 81,6905 167,2200 3,5180 0,1437 81,7409 165,4867 3,4043 0,1432 81,7669 159,8333 3,0543 0,1463 81,5857 154,0300 2,7463 0,1445 81,6917 150,0967 2,5639 0,1439 81,7264 145,7700 2,3894 0,1431 81,7727 143,2667 2,3043 0,1427 81,7976 136,8300 2,1113 0,1428 81,7895 130,7433 1,9659 0,1414 81,8717 126,6600 1,8752 0,1402 81,9400 124,2667 1,8398 0,1405 81,9221 119,5333 1,7466 0,1410 81,8966 113,1100 1,6443 0,1323 82,3981 104,3233 1,4955 0,1278 82,6558 100,7433 1,4392 0,1250 82,8169 95,3067 1,3623 0,1236 82,8978 88,4700 1,2684 0,1174 83,2562 84,7033 1,2209 0,1141 83,4477 81,1400 1,1761 0,1129 83,5158 75,3533 1,0925 0,0958 84,5038 68,0033 0,9940 0,1933 78,8540 62,4100 0,9108 0,2023 78,3273 58,2467 0,8523 0,2116 77,7856 51,8433 0,7486 0,1642 80,5510 44,2900 0,6373 0,1069 83,8616 38,6000 0,5888 0,1453 81,6442 35,0667 0,5389 0,2014 78,3806 30,9463 0,4735 0,2254 76,9724 26,6447 0,4036 0,2301 76,6965 24,3183 0,3714 0,2471 75,6917 19,9457 0,3056 0,2768 73,9313 13,9600 0,2560 0,0583 86,6589 9,8490 0,1989 0,3021 72,4162 7,8130 0,1676 0,3005 72,5106 5,2537 0,1305 0,3010 72,4829 3,2451 0,0919 0,2084 77,9691 0,9098 0,0641 0,1282 82,6350

37
3.3.4 Curva Tensão Terminal x Corrente no Estator
Essa curva, que relaciona a tensão terminal Vt da maquina à sua corrente estatórica Is,
é obtida diretamente, plotando-se os dados de corrente e tensão do item anterior.
Figura 16 – Curva Vt x Is.

38
3.3.5 Definição de uma Faixa de Capacitores de Excitação
O gráfico apresentado na figura 17 mostra a reta que representa a reatância associada a
linha de entreferro.
Figura 17 – Reta associada a linha de entreferro.
Um capacitor de reatância capacitiva maior do que a reatância associada à linha de
entreferro (região linear da curva) não será capaz de excitar a máquina. O outro limite (valor
de capacitância máxima) fica definido por um valor de reatância tal que a corrente do estator
não ultrapasse seu valor nominal a vazio.
39
𝑋!!á! = 𝑋!!"#$!%!$$& (3.4)
• 𝑋!!"#$!%!$$& é a inclinação da linha de entreferro;
• 𝑋!!á! é a reatância capacitiva máxima associada.
Da figura 17, tem-se que:
𝑋!!"#$!%!$$& = 65,45 𝛺
Dessa forma, podemos calcular a capacitância mínima (Cmín) dos capacitores de
excitação.
𝐶!í! =1
2𝜋𝑓.𝑋!!"#$!%!$$&
(3.5)
𝐶!í! = 40,53 𝜇𝐹
• 𝑓 representa a frequência síncrona (60 Hz)
Para a obtenção de Cmáx, temos que a reatância capacitiva mínima é igual a relação
entra a tensão terminal com sua correspondente corrente nominal.
𝑋!!í! =𝑉!
𝐼!"#$!%&=1653,3
= 50 𝛺
Na Figura 18 , está representada a reta associada a reatância capacitiva mínima. A
partir dessa reta, pode-se calcular a capacitância máxima pela expressão (3.6).
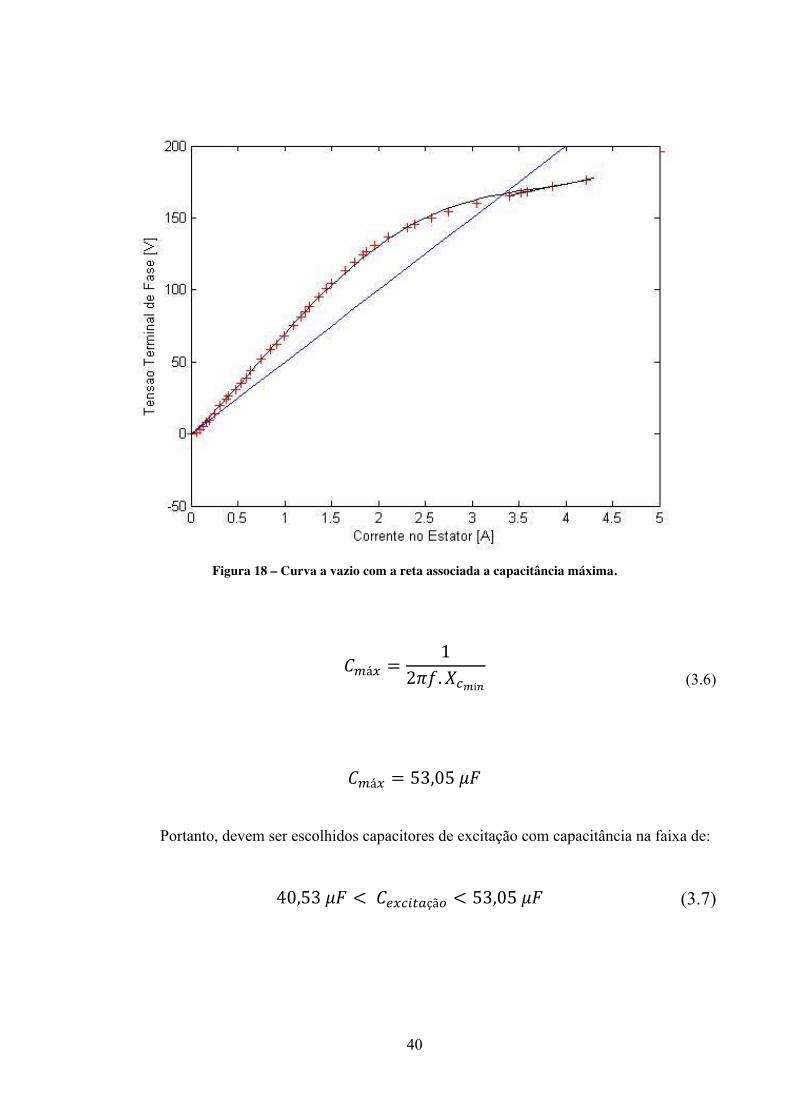
40
Figura 18 – Curva a vazio com a reta associada a capacitância máxima.
𝐶!á! =1
2𝜋𝑓.𝑋!!í!
(3.6)
𝐶!á! = 53,05 𝜇𝐹
Portanto, devem ser escolhidos capacitores de excitação com capacitância na faixa de:
40,53 𝜇𝐹 < 𝐶!"#$%&çã! < 53,05 𝜇𝐹 (3.7)

41
3.3.6 Curva de Magnetização
Esta curva representa a relação entre a tensão de entreferro 𝑉!, com a corrente de
excitação no estator 𝐼!. O valor de 𝑉! pode ser calculado a partir da tensão terminal 𝑉!,
descontando-se desta, a queda de tensão nos enrolamentos do estator.
𝑉! = 𝑉! − 𝐼! . (𝑅! + 𝑗𝑋!) (3.8)
𝑉! 𝛼 = 𝑉! − 𝐼! −𝜃 . (𝑅! + 𝑗𝑋!) (3.9)
Os valores de Rs e Xs foram calculados no ensaio de rotor bloqueado. O restante dos
dados é tirado da Tabela 6. Então, são apresentados os cálculos de módulo e ângulo da tensão
de entreferro.
Tabela 7 – Valores da Tensão de entreferro
Vg 𝜶 165,6900 2,3400 162,4000 2,2000 159,5200 2,0800 158,5700 2,0640 157,1300 2,0150 153,3100 1,8500 147,2800 1,7300 143,7800 1,6500 139,8800 1,5900 137,5700 1,5600 131,6700 1,4900 125,8900 1,4500 122,0400 1,4300 119,7400 1,4300 115,2240 1,4000 109,0600 1,4000
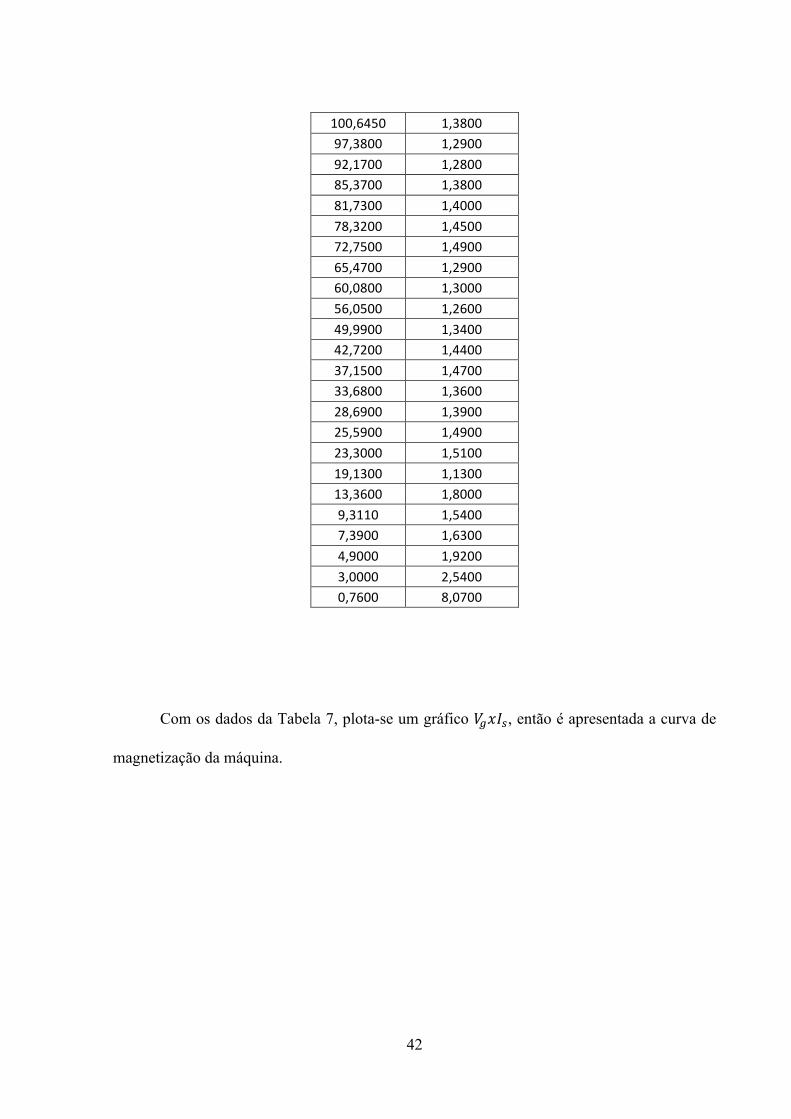
42
100,6450 1,3800 97,3800 1,2900 92,1700 1,2800 85,3700 1,3800 81,7300 1,4000 78,3200 1,4500 72,7500 1,4900 65,4700 1,2900 60,0800 1,3000 56,0500 1,2600 49,9900 1,3400 42,7200 1,4400 37,1500 1,4700 33,6800 1,3600 28,6900 1,3900 25,5900 1,4900 23,3000 1,5100 19,1300 1,1300 13,3600 1,8000 9,3110 1,5400 7,3900 1,6300 4,9000 1,9200 3,0000 2,5400 0,7600 8,0700
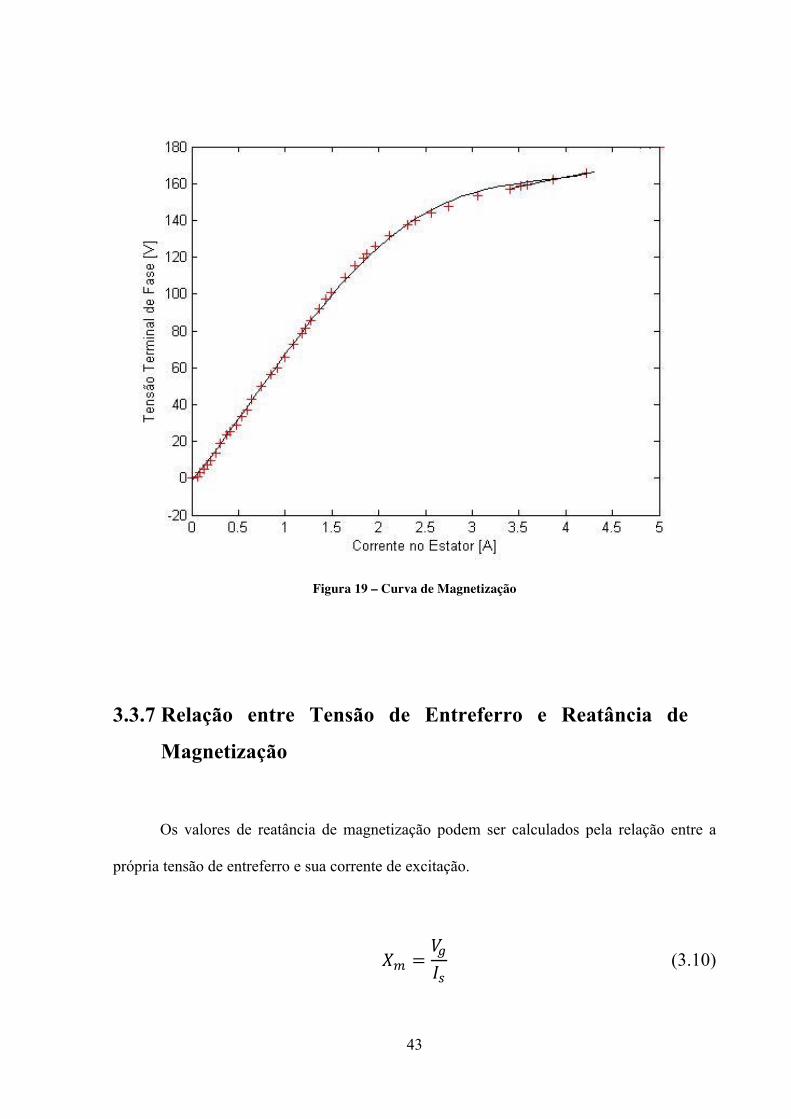
Com os dados da Tabela 7, plota-se um gráfico 𝑉!𝑥𝐼!, então é apresentada a curva de
magnetização da máquina.
43
Figura 19 – Curva de Magnetização
3.3.7 Relação entre Tensão de Entreferro e Reatância de
Magnetização
Os valores de reatância de magnetização podem ser calculados pela relação entre a
própria tensão de entreferro e sua corrente de excitação.
𝑋! =
𝑉!𝐼!
(3.10)
44
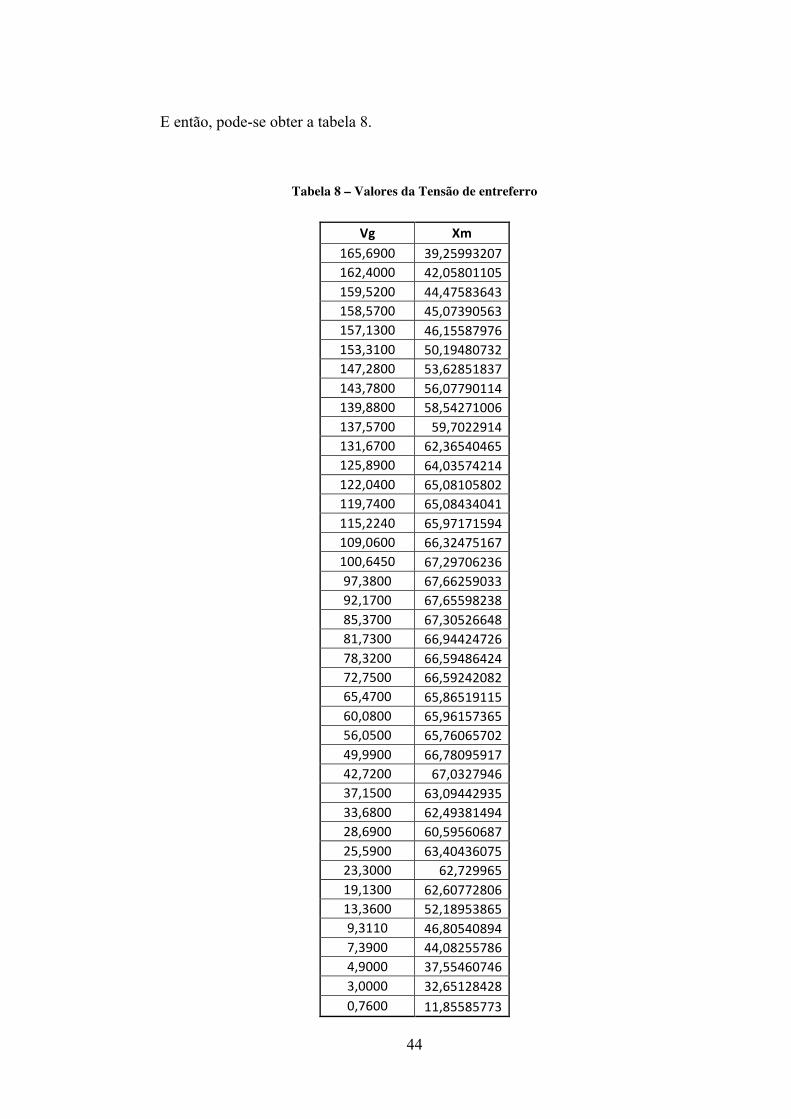
E então, pode-se obter a tabela 8.
Tabela 8 – Valores da Tensão de entreferro
Vg Xm 165,6900 39,25993207 162,4000 42,05801105 159,5200 44,47583643 158,5700 45,07390563 157,1300 46,15587976 153,3100 50,19480732 147,2800 53,62851837 143,7800 56,07790114 139,8800 58,54271006 137,5700 59,7022914 131,6700 62,36540465 125,8900 64,03574214 122,0400 65,08105802 119,7400 65,08434041 115,2240 65,97171594 109,0600 66,32475167 100,6450 67,29706236 97,3800 67,66259033 92,1700 67,65598238 85,3700 67,30526648 81,7300 66,94424726 78,3200 66,59486424 72,7500 66,59242082 65,4700 65,86519115 60,0800 65,96157365 56,0500 65,76065702 49,9900 66,78095917 42,7200 67,0327946 37,1500 63,09442935 33,6800 62,49381494 28,6900 60,59560687 25,5900 63,40436075 23,3000 62,729965 19,1300 62,60772806 13,3600 52,18953865 9,3110 46,80540894 7,3900 44,08255786 4,9000 37,55460746 3,0000 32,65128428 0,7600 11,85585773
45
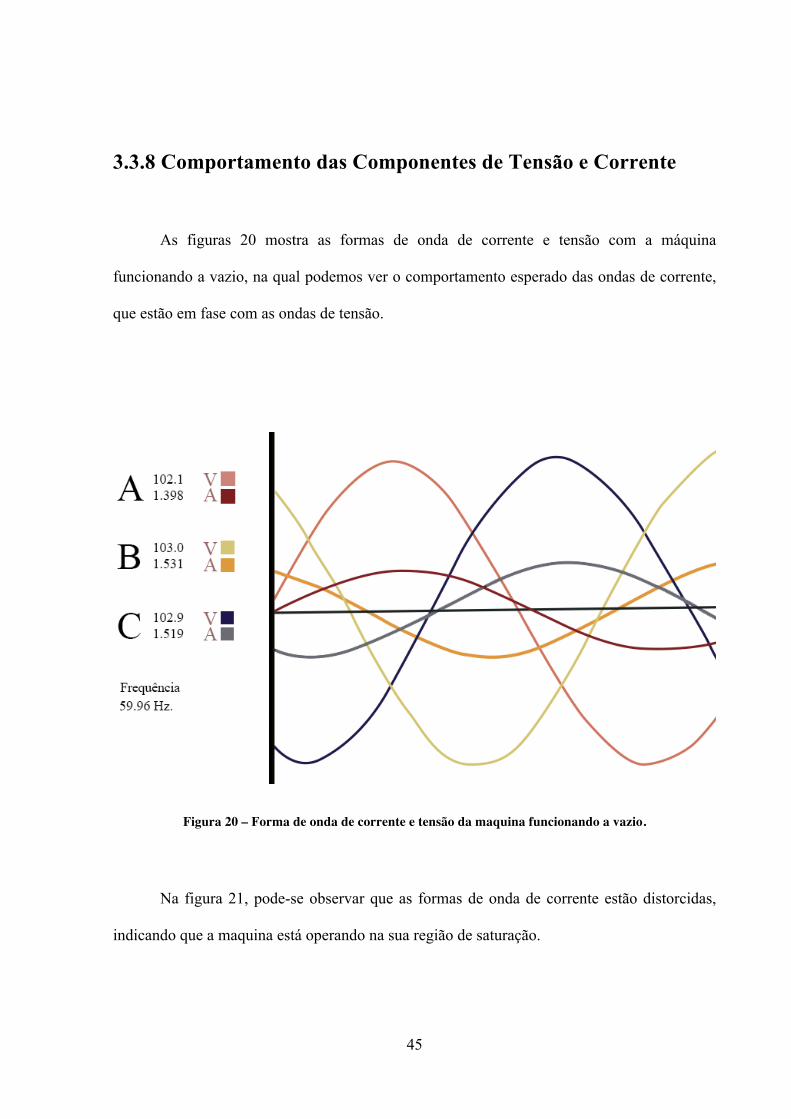
3.3.8 Comportamento das Componentes de Tensão e Corrente
As figuras 20 mostra as formas de onda de corrente e tensão com a máquina
funcionando a vazio, na qual podemos ver o comportamento esperado das ondas de corrente,
que estão em fase com as ondas de tensão.
Figura 20 – Forma de onda de corrente e tensão da maquina funcionando a vazio.
Na figura 21, pode-se observar que as formas de onda de corrente estão distorcidas,
indicando que a maquina está operando na sua região de saturação.

46
Figura 21 – Forma de onda de corrente e tensão da maquina operando a vazio na sua região de saturação.
3.4 Ensaio na Maquina de Indução Funcionando como Gerador Auto Excitado
Neste ensaio, o objetivo é estudar o comportamento da máquina, quando operando
como gerador auto excitado por capacitores, alimentando carga resistiva.
3.4.1 Material Utilizado
47
• Máquina de Indução;
• Motor de Corrente contínua com resistência de campo variável;
• Auto Transformador Variável Trifásico (0-440)V;
• Gossen-Metrawatt MAVOWATT 30;
• 3 amperímetros alicate;
• Banco de capacitores com possíveis associações de 5, 10 e 20 𝜇𝐹.
• Lampadas de 25W, 60W, 100W, 200W e 500W a 220 V;
• Prancha para alocação das cargas resistivas;
• Tacômetro digital.
3.4.2 Procedimento Experimental
Antes de começar o ensaio, foi feito um teste com 40 𝜇𝐹 de capacitância, que não foi
capaz de excitar a maquina, com 45 𝜇𝐹, que foi capaz de excitar a maquina, com 55 𝜇𝐹, que
fez com que a corrente no estator ficasse um pouco acima da nominal. Com esse pequeno
teste confirmou-se o cálculo da faixa de capacitância, feito no item 3.3.5.
Com o objetivo de alimentar uma faixa um pouco mais ampla de potência, foi
utilizada uma associação de capacitores com 60 𝜇𝐹 de capacitância.
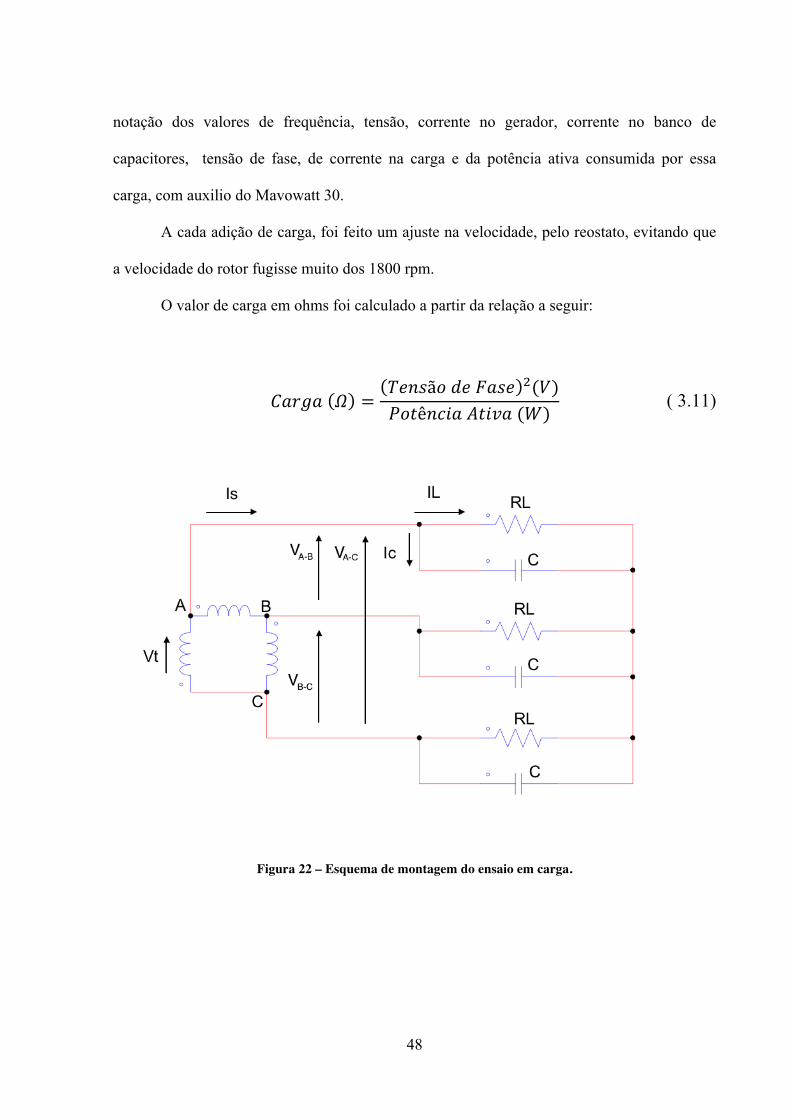
Primeiramente, foram ligados o banco de capacitores e a prancha de carga,
devidamente conectados em estrela, conexão para a qual o banco de capacitores foi
dimensionado. A Figura 22 mostra o esquema de montagem e a Figura 23, a bancada do
ensaio.
Em seguida, liga-se o motor de corrente continua acoplado ao gerador. Então, com o
auxilio do reostato de campo, a velocidade do motor CC foi ajustada em torno de 1800 rpm,
com o objetivo de gerar tensão em uma frequência próxima a 60 Hz. Com isso, inicia-se a
48
notação dos valores de frequência, tensão, corrente no gerador, corrente no banco de
capacitores, tensão de fase, de corrente na carga e da potência ativa consumida por essa
carga, com auxilio do Mavowatt 30.
A cada adição de carga, foi feito um ajuste na velocidade, pelo reostato, evitando que
a velocidade do rotor fugisse muito dos 1800 rpm.
O valor de carga em ohms foi calculado a partir da relação a seguir:
𝐶𝑎𝑟𝑔𝑎 𝛺 =
𝑇𝑒𝑛𝑠ã𝑜 𝑑𝑒 𝐹𝑎𝑠𝑒 !(𝑉)𝑃𝑜𝑡ê𝑛𝑐𝑖𝑎 𝐴𝑡𝑖𝑣𝑎 (𝑊)
( 3.11)
Figura 22 – Esquema de montagem do ensaio em carga.
49
Figura 23 – Bancada do ensaio com o gerador de indução.

50
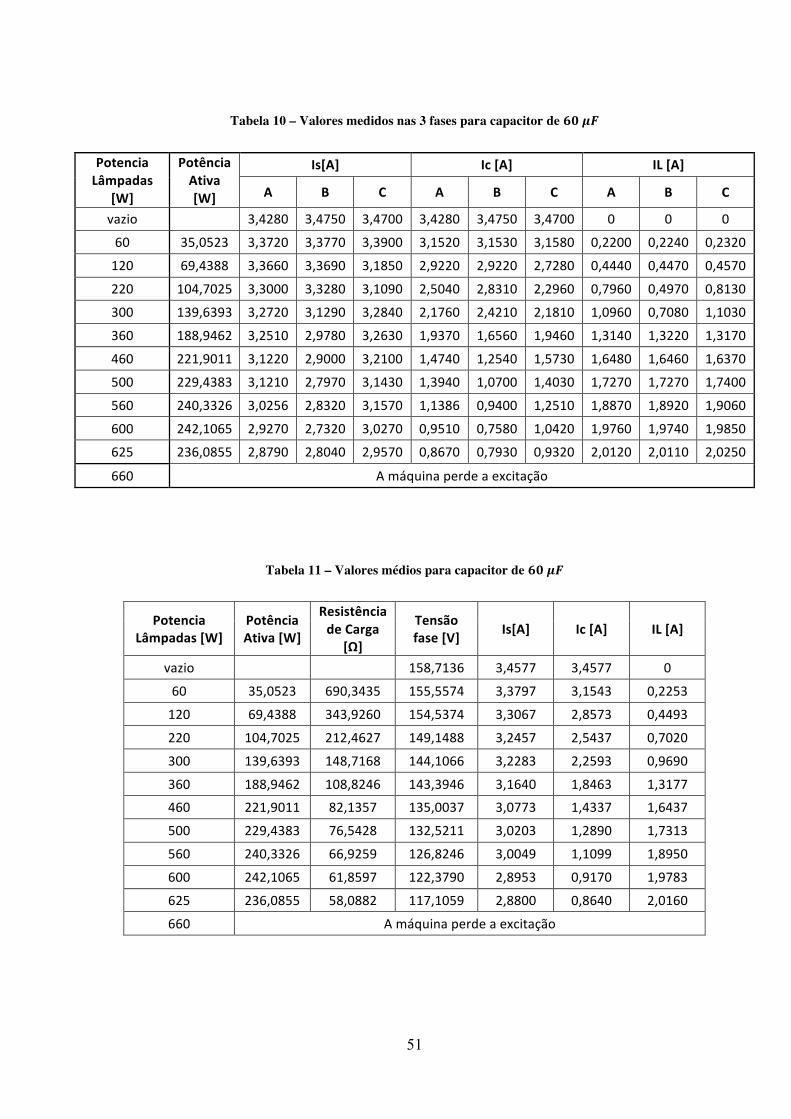
3.4.3 Ensaio sob Carga Resistiva
A seguir são apresentados os resultados das medições. Nas tabelas 9 e 10, pode-se
observar os valores, para as fases A, B e C, de tensão de linha, tensão de fase e as respectivas
correntes no estator Is, no capacitor Ic e na carga 𝐼!, além da potencia trifásica total a cada
adição de carga.
Nas tabelas 11 e 12 são apresentados os cálculos médios por fase dos valores medidos
nas tabelas 9 e 10, além da resistência imposta pela carga, calculada a partir de (3.11).
Tabela 9 – Valores medidos nas 3 fases para capacitor de 𝟔𝟎 𝝁𝑭
Potencia Lâmpadas
[W]
Potência Ativa [W]
Tensão linha [V] Tensão fase [V]
A B C A B C
vazio 274,04 275,00 275,7000 158,1940 158,7713 159,1755
60 35,0523 268,70 269,50 270,1000 155,1340 155,5959 155,9423
120 69,4388 267,10 267,40 268,5000 154,2103 154,3835 155,0185
220 104,7025 257,90 258,10 259,0000 148,8986 149,0141 149,5337
300 139,6393 249,10 249,40 250,3000 143,8180 143,9912 144,5108
360 188,9462 247,90 248,10 249,1000 143,1251 143,2406 143,8180
460 221,9011 233,60 233,30 234,6000 134,8690 134,6958 135,4464
500 229,4383 229,30 229,20 230,1000 132,3864 132,3287 132,8483
560 240,3326 219,30 219,20 220,5000 126,6129 126,5552 127,3057
600 242,1065 211,70 211,40 212,8000 122,2251 122,0518 122,8601
625 236,0855 202,40 202,80 203,3000 116,8557 117,0866 117,3753
660 A máquina perde a excitação
51
Tabela 10 – Valores medidos nas 3 fases para capacitor de 𝟔𝟎 𝝁𝑭
Potencia Lâmpadas
[W]
Potência Ativa [W]
Is[A] Ic [A] IL [A]
A B C A B C A B C
vazio 3,4280 3,4750 3,4700 3,4280 3,4750 3,4700 0 0 0
60 35,0523 3,3720 3,3770 3,3900 3,1520 3,1530 3,1580 0,2200 0,2240 0,2320
120 69,4388 3,3660 3,3690 3,1850 2,9220 2,9220 2,7280 0,4440 0,4470 0,4570
220 104,7025 3,3000 3,3280 3,1090 2,5040 2,8310 2,2960 0,7960 0,4970 0,8130
300 139,6393 3,2720 3,1290 3,2840 2,1760 2,4210 2,1810 1,0960 0,7080 1,1030
360 188,9462 3,2510 2,9780 3,2630 1,9370 1,6560 1,9460 1,3140 1,3220 1,3170
460 221,9011 3,1220 2,9000 3,2100 1,4740 1,2540 1,5730 1,6480 1,6460 1,6370
500 229,4383 3,1210 2,7970 3,1430 1,3940 1,0700 1,4030 1,7270 1,7270 1,7400
560 240,3326 3,0256 2,8320 3,1570 1,1386 0,9400 1,2510 1,8870 1,8920 1,9060
600 242,1065 2,9270 2,7320 3,0270 0,9510 0,7580 1,0420 1,9760 1,9740 1,9850
625 236,0855 2,8790 2,8040 2,9570 0,8670 0,7930 0,9320 2,0120 2,0110 2,0250
660 A máquina perde a excitação
Tabela 11 – Valores médios para capacitor de 𝟔𝟎 𝝁𝑭
Potencia Lâmpadas [W]
Potência Ativa [W]
Resistência de Carga
[Ω]
Tensão fase [V] Is[A] Ic [A] IL [A]
vazio 158,7136 3,4577 3,4577 0
60 35,0523 690,3435 155,5574 3,3797 3,1543 0,2253
120 69,4388 343,9260 154,5374 3,3067 2,8573 0,4493
220 104,7025 212,4627 149,1488 3,2457 2,5437 0,7020
300 139,6393 148,7168 144,1066 3,2283 2,2593 0,9690
360 188,9462 108,8246 143,3946 3,1640 1,8463 1,3177
460 221,9011 82,1357 135,0037 3,0773 1,4337 1,6437
500 229,4383 76,5428 132,5211 3,0203 1,2890 1,7313
560 240,3326 66,9259 126,8246 3,0049 1,1099 1,8950
600 242,1065 61,8597 122,3790 2,8953 0,9170 1,9783
625 236,0855 58,0882 117,1059 2,8800 0,8640 2,0160
660 A máquina perde a excitação
52
Tabela 12 – Valores médios para capacitor de 𝟔𝟎 𝝁𝑭
Potencia Lâmpadas
[W]
Potência Ativa [W]
Resistência de Carga
[Ω] fs[Hz] Ws [rpm] Wr [rpm] Escorregamento
[S]
vazio 59,82 1794,56 1803 -‐0,004701
60 35,0523 690,3435 59,90 1796,94 1807 -‐0,005596
120 69,4388 343,9260 58,92 1767,48 1799 -‐0,017834
220 104,7025 212,4627 59,26 1777,69 1804 -‐0,014799
300 139,6393 148,7168 59,23 1777,04 1808 -‐0,017420
360 188,9462 108,8246 58,81 1764,18 1798 -‐0,019172
460 221,9011 82,1357 58,33 1749,81 1797 -‐0,026966
500 229,4383 76,5428 58,50 1754,88 1801 -‐0,026281
560 240,3326 66,9259 58,45 1753,62 1806 -‐0,029869
600 242,1065 61,8597 58,40 1752,10 1808 -‐0,031903
625 236,0855 58,0882 58,14 1744,12 1803 -‐0,033759
660 A máquina perde a excitação
3.4.4 Forma de Onda de Tensão e Corrente
Com o gerador de indução auto excitado com um banco de capacitores de 60 𝜇𝐹,
operando a vazio, as correntes ficam na região de saturação, como mostra a Figura 21. Por
essa razão é necessária atenção redobrada ao excitar o gerador de indução a vazio. Pode-se
reparar, que quando saturada, a corrente apresenta forma de onda distorcida.
As Figuras 24, 25 e 26 mostram, respectivamente, as formas de onda da corrente no
estator em um ponto de operação saturado e as formas de onda da corrente no estator e na
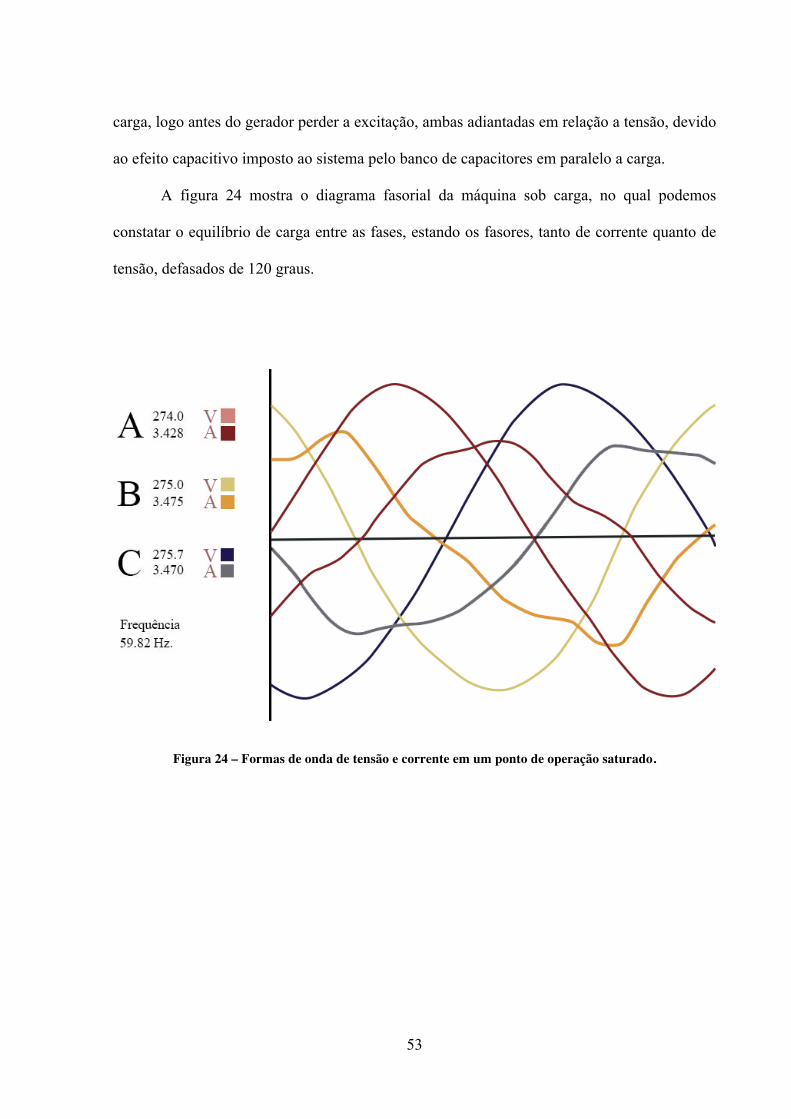
53
carga, logo antes do gerador perder a excitação, ambas adiantadas em relação a tensão, devido
ao efeito capacitivo imposto ao sistema pelo banco de capacitores em paralelo a carga.
A figura 24 mostra o diagrama fasorial da máquina sob carga, no qual podemos
constatar o equilíbrio de carga entre as fases, estando os fasores, tanto de corrente quanto de
tensão, defasados de 120 graus.
Figura 24 – Formas de onda de tensão e corrente em um ponto de operação saturado.
54
Figura 25 – Formas de onda de tensão e de corrente no estator.
Figura 26 – Formas de onda de tensão e de corrente na carga.
55
Figura 27 – Diagrama Fasorial do Gerador de Indução em carga.
56
4 Capítulo 4
Simulação Digital do Comportamento da Máquina
A simulação digital tem como motivação obter, a partir do modelo considerado no
item 2.3.4, os níveis de tensão terminal, corrente de carga, potência ativa de saída, assim
como a frequência do sinal de saída, a reatância de magnetização e a corrente do estator, para
diferentes condições de carga.
Os dados obtidos a partir desta simulação vão servir de base para uma avaliação do
modelo da máquina de indução funcionando como gerador auto excitado.
4.1 Descrição do Método Utilizado
Um método iterativo, ou método numérico, tem como objetivo determinar um ou mais
valores, que representam a solução de um problema, principalmente, quando o cálculo direto
é muito longo ou complexo. Os métodos iterativos produzem soluções aproximadas e, por
isso, se faz necessário definir qual a precisão pretendida nos cálculos da solução numérica
desejada.
O objetivo aqui é resolver as equações (2.26) e (2.27), referentes a figura 9, que
representa o modelo da maquina de indução funcionando como gerador auto-excitado por
capacitores.
As equações (2.26) e (2.27) devem ser satisfeitas simultaneamente. Xm e F são
obtidos de forma iterativa através do método de Newton-Raphson, escolhido para este
trabalho pela sua característica de rápida convergência.

57
4.1.1 Newton-Raphson
A ideia central no método de Newton-Raphson consiste na linearização da função a
ser calculada via serie de Taylor, como pode ser visto através dos passos a seguir.
• Condição inicial – 𝑥! , 𝑖 = 0;
• Cálculo do valor da função no ponto 𝑥!: 𝑓 𝑥! ;
• Linearização da função em torno do ponto (𝑥! , 𝑓 𝑥! ) pela serie de Taylor:
𝑓 𝑥! + 𝛥𝑥! = 𝑓 𝑥! +𝑑𝑓 𝑥!
𝑑𝑥 .𝛥𝑥! +⋯
As derivadas de ordem igual ou superior a dois são desprezadas, logo:
𝑓 𝑥! + 𝑓 ′ 𝑥! .𝛥𝑥! = 0
𝛥𝑥! =−𝑓 𝑥!
𝑓 ′(𝑥!)
• Iteração :
𝑥!!! = 𝑥! + 𝛥𝑥!
• Volta ao segundo passo : Cálculo da função no novo ponto 𝑥!!!: 𝑓 𝑥!!!
Esse processo deve ser mantido até que 𝑓 𝑥 ≤ 𝜀, sendo 𝜀, o valor do erro
estipulado previamente. No caso desse trabalho, a função abordada é definida por uma matriz,
ou seja, deve-se utilizar a forma multidimensional do método Newton-Raphson, assim como
nos cálculos de fluxo de potencia em redes elétricas.
Portanto, emprega-se o seguinte tipo de linearização:

58
𝑓 𝑥! + 𝛥𝑥! = 𝑓 𝑥! + 𝐽!𝛥𝑥!
Onde,
𝐽 =𝜕𝑓𝜕𝑥
! ! !
é chamada de matriz Jacobiana ou Jacobiano.
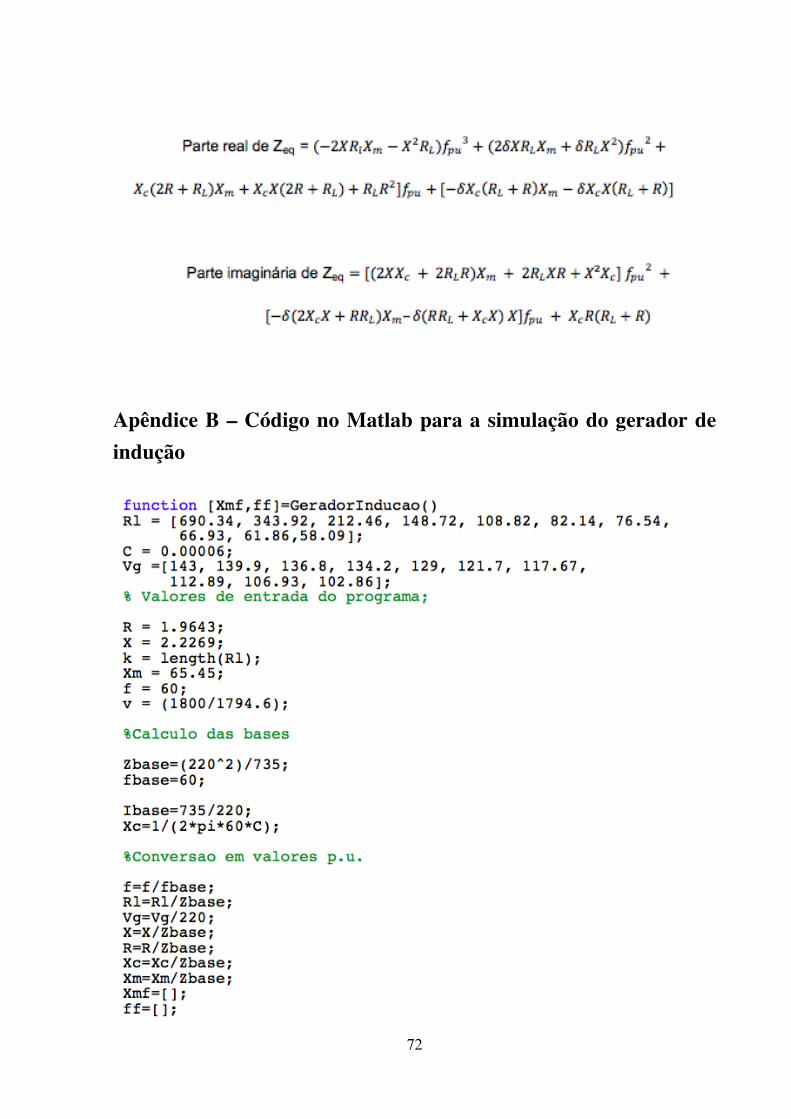
4.2 Descrição do Programa
O programa deve solucionar as equações (2.26) e (2.27) para cada valor de resistência
de carga fornecidos como entrada. Para isso deve-se entrar com os valores iniciais de
frequência de 60 Hz e de reatância de magnetização de entreferro de 65,45 𝛺, esse último
calculado no item 3.3.5. A capacitância usada na simulação deve ser a mesma que a usada no
ensaio em carga, assim como os valores de carga.
Uma vez definidos os parâmetros de entrada, faz-se necessário o cálculo dos termos do
Jacobiano, logo define-se:
𝐹 𝑋! , 𝑓!" = 𝑅𝑒 𝑍!" (3.10)
𝐺 𝑋! , 𝑓!" = 𝐼𝑚 𝑍!" (3.11)
O cálculo das derivadas parciais é apresentado abaixo.

59
𝜕𝐹 𝑋! , 𝑓!"𝜕𝑋!
= −2.𝑋.𝑅! . 𝑓!"! + 2. 𝛿.𝑋.𝑅! . 𝑓!"! + 𝑋! . 2.𝑅 + 𝑅! 𝑓!"
− 𝛿.𝑋! . 𝑅! + 𝑅 ; (3.12)
𝜕𝐹 𝑋! , 𝑓!"𝜕𝑓!"
= 3. −2.𝑋.𝑅! .𝑋! − 𝑅! .𝑋! . 𝑓!"!
+ 2. 2. 𝛿.𝑋.𝑅! .𝑋! + 𝛿.𝑅! .𝑋! 𝑓!" + 𝑋! 2.𝑅 + 𝑅! 𝑋!
+ 𝑋.𝑋! 𝑅! + 2𝑅 + 𝑅!𝑅!; (3.13)
𝜕𝐺 𝑋! , 𝑓!"𝜕𝑋!
= 2𝑋𝑋! + 2𝑅𝑅! 𝑓!"! − 𝛿𝑓!"(2𝑋𝑋! + 𝑅!𝑅)𝑓!"; (3.14)
𝜕𝐺 𝑋! , 𝑓!"𝜕𝑓!"
= 2𝑓!" 2𝑋𝑋! + 2𝑅𝑅! 𝑋! + 2𝑅𝑅!𝑋 + 𝑋!𝑋!
− 𝛿𝑋!(2𝑋𝑋! + 𝑅!𝑅) − 𝛿𝑋(𝑋𝑋! + 𝑅!𝑅); (3.15)
Dessa forma, calcula-se a matriz Jacobiana e pode-se resolver, a cada iteração, o
sistema descrito em (3.17).
𝐽 =
𝜕𝐹 𝑋! , 𝑓!"𝜕𝑋!
𝜕𝐹 𝑋! , 𝑓!"𝜕𝑓!"
𝜕𝐺 𝑋! , 𝑓!"𝜕𝑋!
𝜕𝐺 𝑋! , 𝑓!"𝜕𝑓!"
(3.16)
𝐻!(𝑖 + 1)𝐻!(𝑖 + 1)
= 𝐽!!𝑥 −𝐹 𝑖−𝐺 𝑖 (3.17)

60
As variáveis 𝑋! e 𝑓!" devem ser atualizadas e o valores de 𝐹 𝑋!, 𝑓!" e 𝐺 𝑋!, 𝑓!"
devem ser calculados a cada uma dessas iterações.
𝑋! 𝑖 + 1 = 𝑋! 𝑖 + 𝐻!(𝑖 + 1) (3.18)
𝑓!" 𝑖 + 1 = 𝑓!" 𝑖 + 𝐻!(𝑖 + 1) (3.19)
Assim que houver a convergência dos valores, ou seja, 𝐹 𝑋!, 𝑓!" e 𝐺 𝑋!, 𝑓!"
estiverem abaixo da tolerância estabelecida, então o processo acabou e os valores de 𝑋! e 𝑓!"
são armazenados para o respectivo valor de carga.
Com os valores de reatância de magnetização convergidos, é possível estimar os
valores de tensão de entreferro pela relação entre essas variáveis mostrada na Tabela 8. Por
fim, é possível fazer uma estimativa da corrente no estator, da corrente de carga, da corrente
no capacitor e da tensão terminal no estator, referentes as expressões (2.28), (2.29), (2.30) e
(2.31), para cada valor de carga utilizado.
O código do programa foi feito com o auxilio do software Matlab e é apresentado no
apêndice B.
4.2.1 Resultados Obtidos
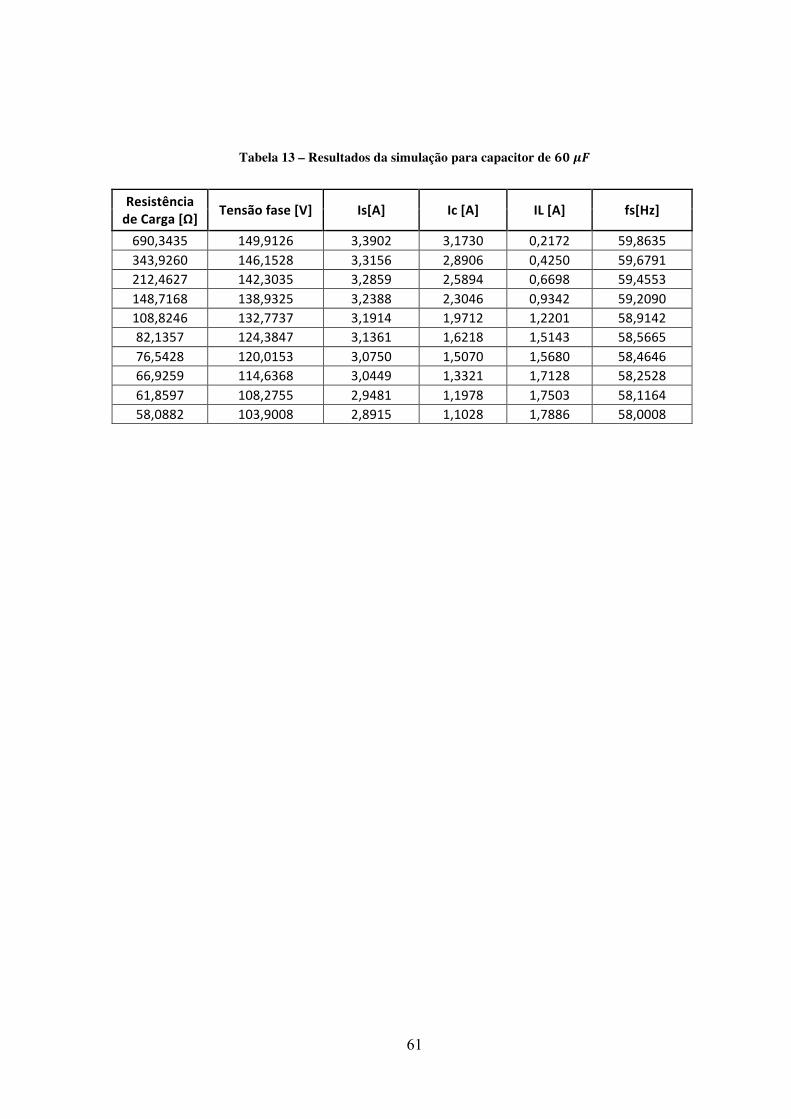
A Tabela 13 mostra os resultados obtidos na simulação digital usando capacitância de
60 𝜇𝐹.
61
Tabela 13 – Resultados da simulação para capacitor de 𝟔𝟎 𝝁𝑭
Resistência de Carga [Ω] Tensão fase [V] Is[A] Ic [A] IL [A] fs[Hz]
690,3435 149,9126 3,3902 3,1730 0,2172 59,8635 343,9260 146,1528 3,3156 2,8906 0,4250 59,6791 212,4627 142,3035 3,2859 2,5894 0,6698 59,4553 148,7168 138,9325 3,2388 2,3046 0,9342 59,2090 108,8246 132,7737 3,1914 1,9712 1,2201 58,9142 82,1357 124,3847 3,1361 1,6218 1,5143 58,5665 76,5428 120,0153 3,0750 1,5070 1,5680 58,4646 66,9259 114,6368 3,0449 1,3321 1,7128 58,2528 61,8597 108,2755 2,9481 1,1978 1,7503 58,1164 58,0882 103,9008 2,8915 1,1028 1,7886 58,0008

62
5 Capítulo 5
Análise dos Resultados e Conclusões
Na Figura 28 é apresentada a curva que relaciona a tensão terminal com a potência de
saída a partir do valores obtidos no ensaio do gerador de indução sob carga resistiva. A tensão
decresce ligeiramente com o aumento da potencia requisitada pela carga, sendo que, para
potências em torno da potência máxima, esse decréscimo se acentua consideravelmente.
Figura 28 – Curva Tensão Terminal x Potência de Saída.
63
Sabe-se que a regulação de tensão do gerador de indução tende a melhorar para
valores maiores de capacitância e, consequentemente, para valores menores de reatância
capacitiva, o que garante um ponto de operação mais dentro da região de saturação,
permitindo uma maior variação de carga para uma menor variação de tensão. Nota-se,
portanto, que o fato da regulação de tensão se apresentar boa para valores fixos de velocidade
e capacitância, se deve fundamentalmente a queda de tensão na impedância de dispersão do
estator, devido ao fato de serem pequenos o aumento da corrente de carga e a redução na
tensão de entreferro. É importante lembrar que deve-se estar atento com valores altos de
capacitância, visto que podem fazer extrapolar o valor nominal de corrente, assim como com
os valores baixos, pois proporcionam pobre regulação de tensão e valor baixo de potência
máxima extraível.
Ainda pela Figura 28, pode-se concluir que o gerador de indução não deve ser usado
para atender a carga máxima que ele pode oferecer, uma vez que nessa região ele não
apresenta boa regulação de tensão. Pela mesma razão, não se aconselha o uso deste gerador
em locais onde não se possa garantir uma velocidade de acionamento fixa ou onde não haja
possibilidade de se obter uma compensação dessa variação com uma correspondente variação
da capacitância de excitação.
Pode-se concluir, portanto, que a escolha do capacitor de excitação deve atender a um
compromisso entre regulação de tensão, corrente máxima no estator e potência máxima
gerada.
Nas figuras a seguir, são mostrados os gráficos que comparam o comportamento da
máquina no ensaio sob carga resistiva e o comportamento da máquina na simulação digital.
Os pontos marcados pelo sinal de “mais”, representam os valores medidos experimentalmente
no ensaio e os valores medidos na simulação são representado por um asterisco azul.
64
A analise é feita para cada valor de resistência imposta pela carga, com a intenção de
facilitar a comparação, uma vez que os valores de entrada da simulação são as resistências de
carga medidas em 3.4.3. As curvas foram ajustadas em função dos valores experimentais, para
que fosse possível analisar os pontos da simulação em relação às mesmas. Novamente, por
motivos de clareza na analise, alguns gráficos não atingem o valor zero para o eixo y,
deixando a escala maior e melhorando a visibilidade de cada ponto.
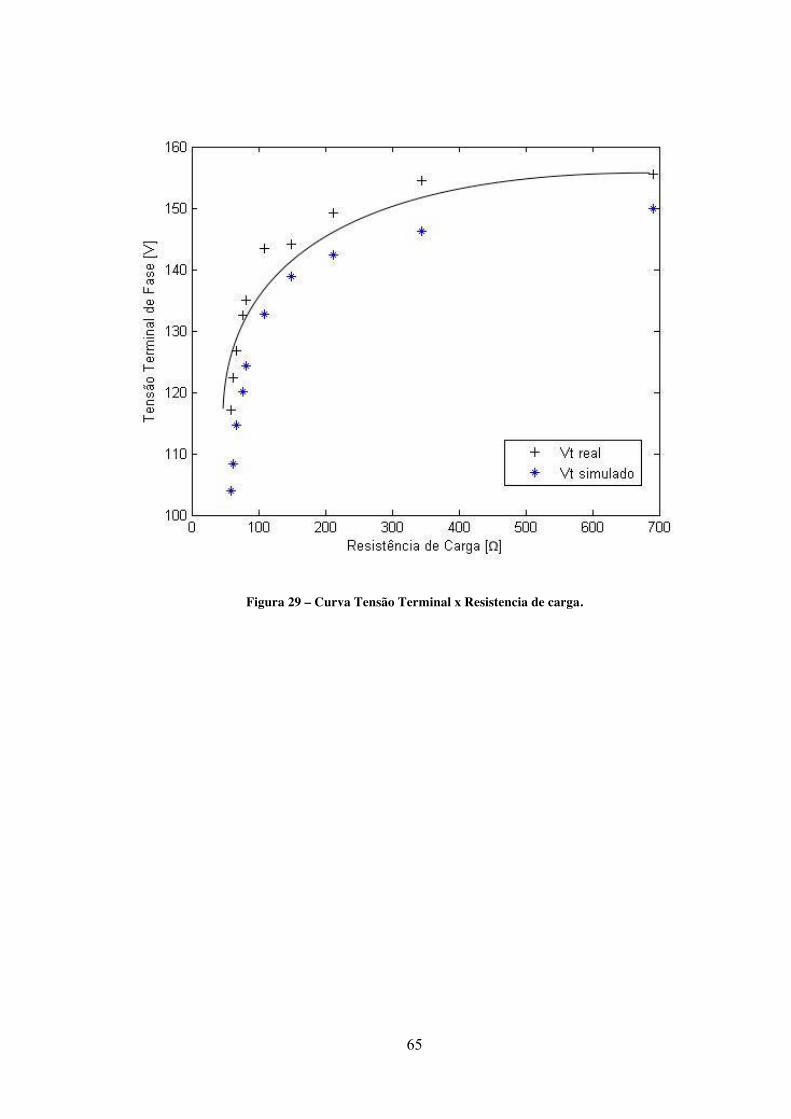
Na Figura 29, observa-se que a tensão tem comportamento inverso ao da figura 28, o
que é esperado, devido ao fato da potência variar de forma inversa à resistência de carga,
como visto em (3.11). Os valores obtidos na simulação se mostram coerentes com o
comportamento da curva para valores experimentais.
O fato das tensões geradas serem superiores à tensão nominal pode ser compreendido
lembrando que o valor nominal de tensão da maquina é definido para seu funcionamento
como motor, cujo ponto de operação é ajustado no inicio do “joelho” da curva de
magnetização.
65
Figura 29 – Curva Tensão Terminal x Resistencia de carga.

66
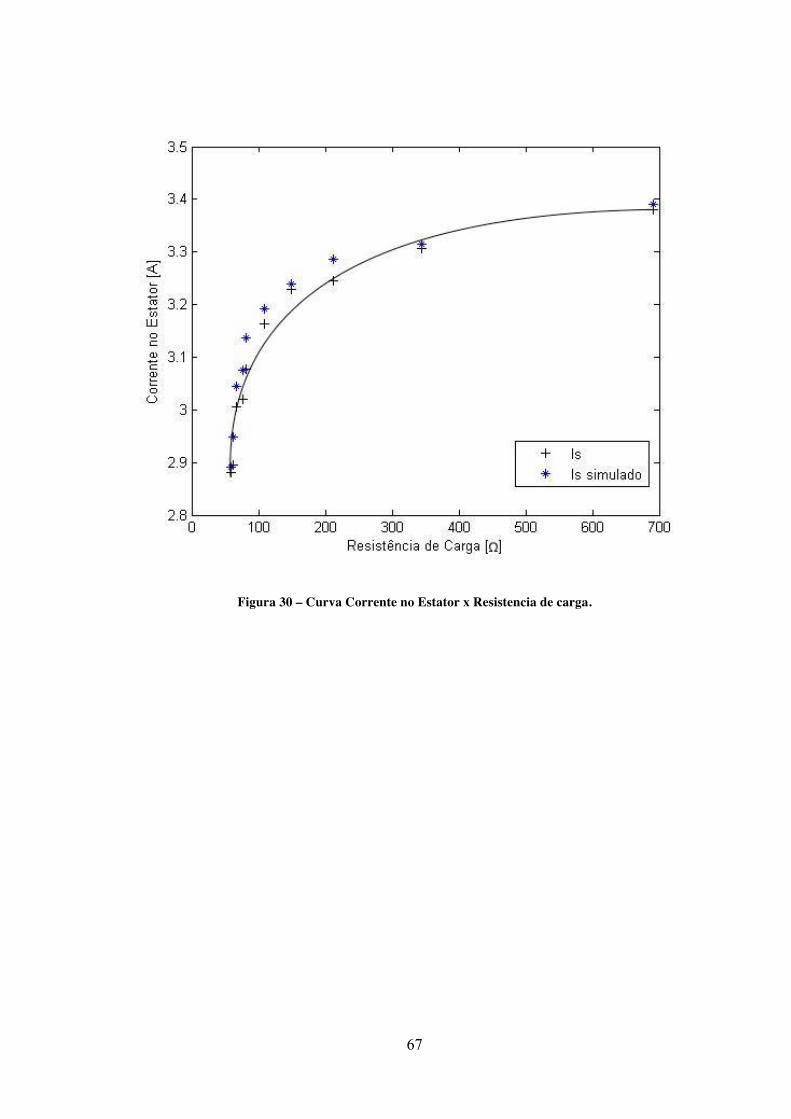
Nas figuras 30, 31 e 32 pode-se observar o comportamento das correntes no estator, no
capacitor e na carga, respectivamente.
Quando o gerador opera em vazio, a corrente no estator é determinada pela corrente
exigida pelo banco de capacitores, tendo essas valores iguais nessa condição.
Com o aumento da potência de saída, ou seja, com o decréscimo da resistência
imposta pela carga, a corrente de carga tende a aumentar, o que é esperado, de acordo com a
expressão (3.4), sendo Z puramente resistivo.
A corrente no estator e no banco de capacitores diminui devido à redução na tensão
terminal e na tensão de entreferro, ao se exigir mais potência da mâquina.
Novamente, os pontos simulados estão em acordo com as curvas experimentais.
67
Figura 30 – Curva Corrente no Estator x Resistencia de carga.

68
Figura 31 – Curva Corrente na carga x Resistencia de carga.

69
Figura 32 – Curva Frequência x Resistencia de carga.
Na Figura 32, observa-se que a frequência cresce ligeiramente com o aumento da
resistência de carga, ou seja, decresce com o aumento da potencia de saída. A variação da
frequência diminui para valores menores de carga.
A frequência da tensão de saída deve ser proporcional à velocidade aplicada no rotor,
sendo a primeira um pouco inferior à frequência imposta no rotor. Sabendo-se disso, verifica-
se que o comportamento da frequência da tensão gerada pode ser controlada através de
mecanismos que ajustem a velocidade do rotor em função da frequência desejada.
Da comparação dos dados simulados e experimentais, pode-se perceber que estes não
apresentam discrepâncias consideráveis.
70
Foram realizadas análises das formas de onda da maquina funcionando como motor
em ponto saturado e não saturado de operação.
Foram realizadas análises das formas de onda da maquina funcionando como gerador
em ponto saturado e não saturado de operação.
Foi realizada a análise do diagrama fasorial do gerador de indução sob carga resistiva.
Com a concordância dos pontos experimentais com os simulados, pode-se concluir a
validação do modelo utilizado para o estudo do gerador de indução, auto excitado por
capacitores, alimentando carga resistiva.

71
6 Apêndices
Apêndice A – Desenvolvimento da expressão da impedância equivalente
Considerando X = Xr = Xs e R = Rr =Rs:
72
Apêndice B – Código no Matlab para a simulação do gerador de indução
73
74
75
7 Referências Bibliográficas
BOLDEA, I.; NASAR S. A. The induction machine handbook. [S.l.]:CRC Press LLC, 2002.
CHAPALLAZ, J. M.; GHALI, J. D.; EICHENBERGER, P.; FISCHER, G. – Manual on
Induction Motors Used As Generators, MHPG Series, 1990.
CHAPMAN, S. J. Electric Machinery Fundamentals. Boston: Ed. McGraw-Hill, 1991.
FITZGERALD, A. E.; KINGSLEY JR, C.; KUSKO A. – Máquinas Elétricas, McGraw-Hill,
1977.
LIMA, N. N., Operação do gerador de indução em conexão assíncrona com a rede
monofásica, Dissertação de mestrado, 2010.
NASCIMENTO, C. S. C., Proposta para implantação de microcentrais de geração à gás com
utilização de geradores de indução, Dissertação de mestrado, 2010.
MOTORES ELÉTRICOS.Estudando o funcionamento dos motores de inducao trifasicos.
Disponível em: < http://www.portaleletricista.com.br>. Acesso em 10 abril de 2016.


















