AA-220 AERODINÂMICA NÃO ESTACIONÁRIAgil/disciplinas/aa-220/aa22010.pdf · de alocação de...
59
1 AA-220 AERODINÂMICA NÃO ESTACIONÁRIA O Método Doublet Lattice Prof. Roberto GIL Email: [email protected] Ramal: 6482
Transcript of AA-220 AERODINÂMICA NÃO ESTACIONÁRIAgil/disciplinas/aa-220/aa22010.pdf · de alocação de...
1
AA-220 AERODINÂMICA NÃO
ESTACIONÁRIA
O Método Doublet Lattice
Prof. Roberto GILEmail: [email protected]: 6482
2
Proposta
� Métodos de elementos discretos são aproximações que permitem tratar numericamente a integral que representa a solução de uma distribuição de soluções elementares da equação do potencial aerodinâmico linearizado sobre uma superfícies sustentadora
� Apresentar o método Doublet Lattice, um tipo de método de elementos discretos, também conhecido como “método de painéis” para o caso plano, ( “planar”), chegando a uma expressão final que permite a sua implementação.
� Este é um dos métodos que são baseados na equação geral:
� Esta forma geral é também conhecida como solução de Küssner (ver NACA-TR-979)
( ) ( ) ( )1, , , ,
4S
d dw x y z p K x y zU
ξ ηξ ηπρ ∞
−= ∆ − −∫∫
3
Métodos de Elementos Discretos
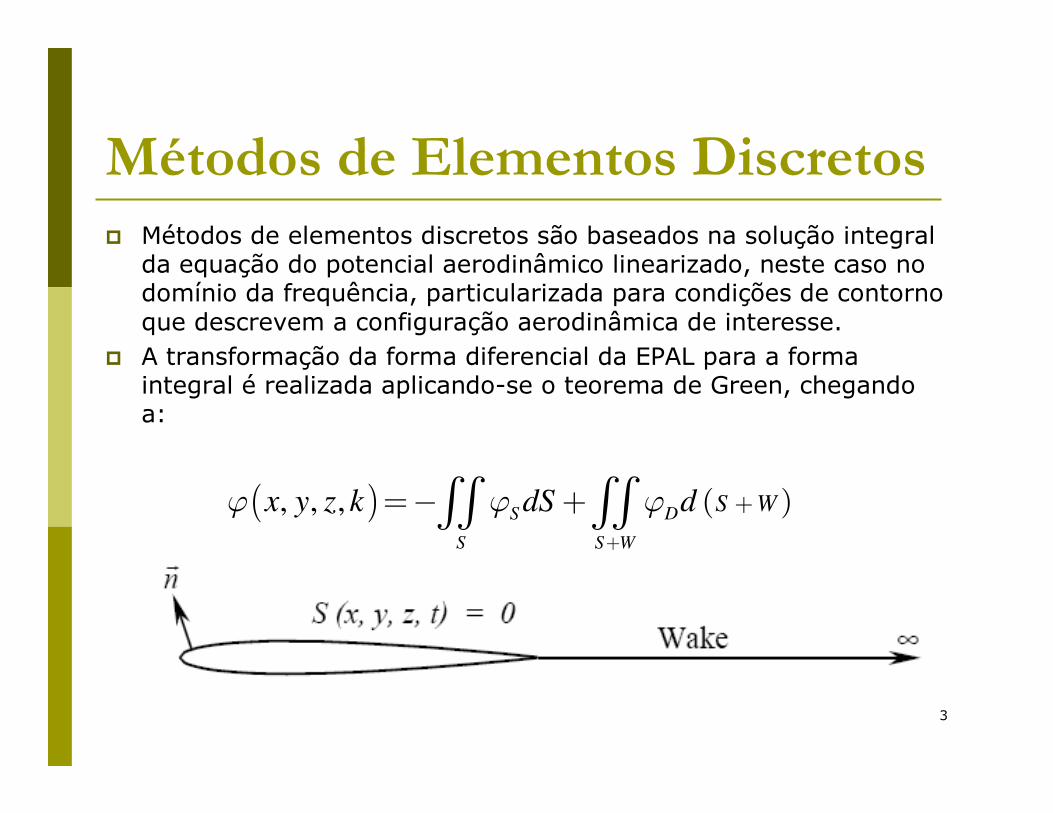
� Métodos de elementos discretos são baseados na solução integral da equação do potencial aerodinâmico linearizado, neste caso no domínio da frequência, particularizada para condições de contorno que descrevem a configuração aerodinâmica de interesse.
� A transformação da forma diferencial da EPAL para a forma integral é realizada aplicando-se o teorema de Green, chegando a:
( ) ( ), , , S D
S S W
S Wx y z k dS dϕ ϕ ϕ
+
+=− +∫∫ ∫∫
4
Solução Elementar
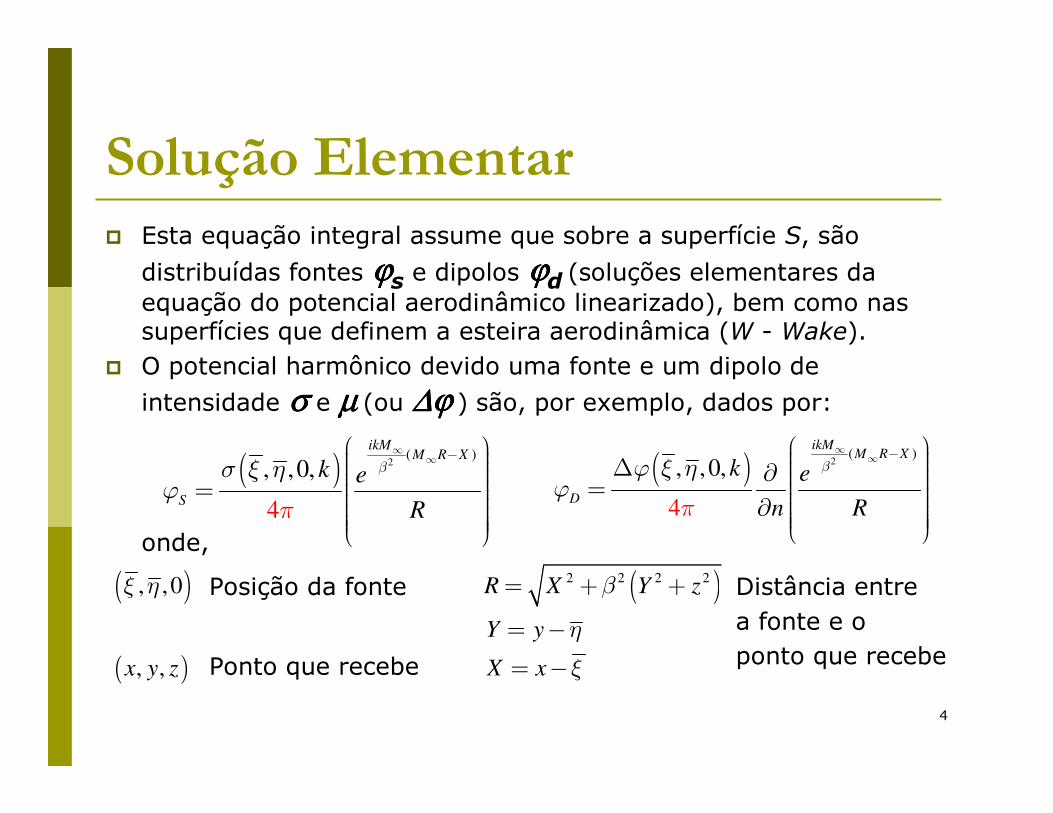
� Esta equação integral assume que sobre a superfície S, são
distribuídas fontes ϕϕϕϕs e dipolos ϕϕϕϕd (soluções elementares da equação do potencial aerodinâmico linearizado), bem como nas superfícies que definem a esteira aerodinâmica (W - Wake).
� O potencial harmônico devido uma fonte e um dipolo de
intensidade σσσσ e µµµµ (ou ∆ϕ∆ϕ∆ϕ∆ϕ ) são, por exemplo, dados por:
onde,
( ) 2( )
, ,0
4
,ikM
M R X
S
k e
R
βσ ξϕ
π
η∞
∞ − =
( ) ( )
( )
2 2 2 2, ,0
, ,
R X Y z
Y y
x y z X x
ξ η β
η
ξ
= + +
= −
= −
( ) 2( )
, , 0,
4
ikMM R X
D
k e
n R
β
π
ϕ ξ ηϕ
∞∞ − ∆ ∂ = ∂
Distância entrea fonte e o ponto que recebePonto que recebe
Posição da fonte
5
Kernel
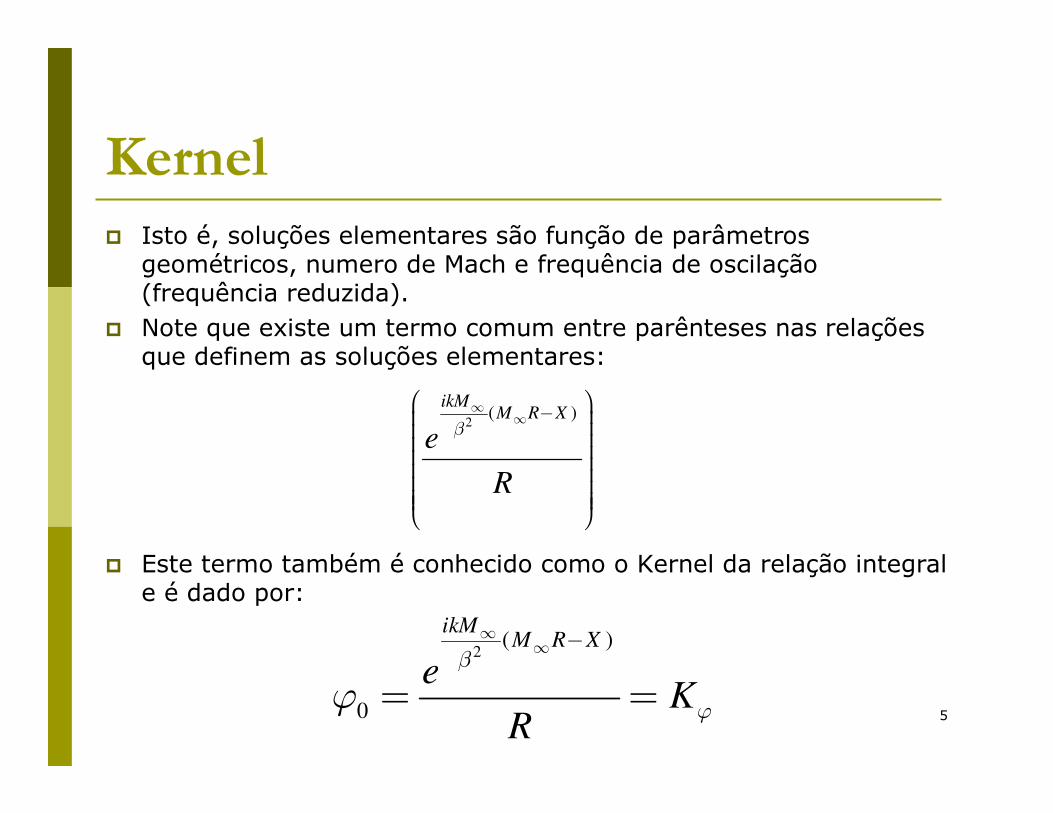
� Isto é, soluções elementares são função de parâmetros geométricos, numero de Mach e frequência de oscilação (frequência reduzida).
� Note que existe um termo comum entre parênteses nas relações que definem as soluções elementares:
� Este termo também é conhecido como o Kernel da relação integral e é dado por:
2( )
ikMM R X
e
R
β
∞∞ −
2( )
0
ikMM R X
eK
R
β
ϕϕ
∞∞ −
= =

6
Kernel
� O Kernel é uma função de Green de espaço livre, da equação:
� Ele representa a solução da equação acima sobre um domínio tridimensional com uma fonte ou um dipolo pontual não estacionária de intensidade unitária concentrada no ponto
� Assume-se como notação para a intensidade do dipolo como ∆ϕ∆ϕ∆ϕ∆ϕ
pois o mesmo representa um salto de potencial através da superfície de sustentação sobre a qual estes dipolos estão distribuídos.
( ) ( ), , , S D
S S W
S Wx y z k dS dϕ ϕ ϕ
+
+=− +∫∫ ∫∫
( ), , 0ξ η
7
Kernel
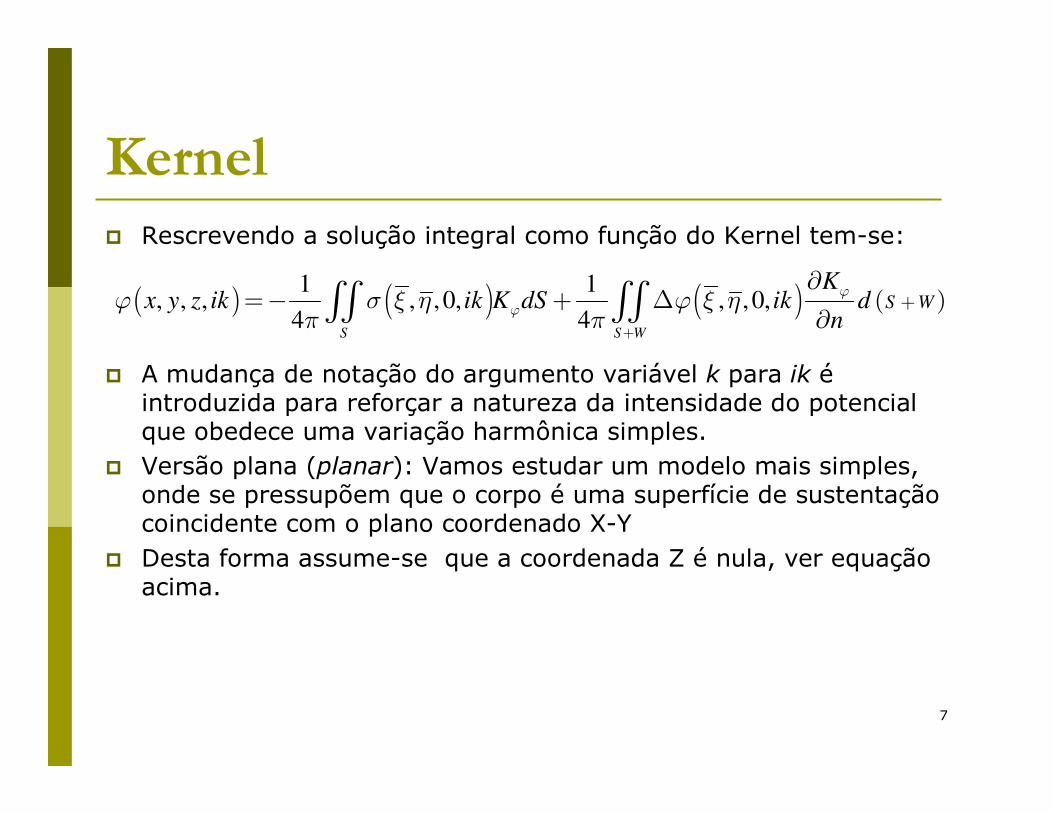
� Rescrevendo a solução integral como função do Kernel tem-se:
� A mudança de notação do argumento variável k para ik éintroduzida para reforçar a natureza da intensidade do potencial que obedece uma variação harmônica simples.
� Versão plana (planar): Vamos estudar um modelo mais simples, onde se pressupõem que o corpo é uma superfície de sustentação coincidente com o plano coordenado X-Y
� Desta forma assume-se que a coordenada Z é nula, ver equação acima.
( ) ( ) ( ) ( )1 1
, , , , ,0, , ,0,4 4
S S W
S WK
x y z ik ik K dS ik dn
ϕ
ϕϕ σ ξ η ϕ ξ ηπ π
+
+∂
=− + ∆∂∫∫ ∫∫

8
O Método de Funções Kernel
� Como já vimos, o objetivo dos método baseados em função Kernel é resolver o problema de configurações complexas, tais como aeronaves completas;
� Subdivide-se a superfície destas configurações aerodinamicamente complexas, bem como a esteira que se forma a jusante do corpo elementos geométricos discretos de área de tamanho finito, aos quais associam-se pontos de referência;
� Sobre cada ponto deste área elementar, assume-se que existe uma distribuição fontes e dipolos. Estas singularidades são soluções elementares da equação integral (e também da diferencial) que modela o nosso problema.
9
Sustentação não estacionária
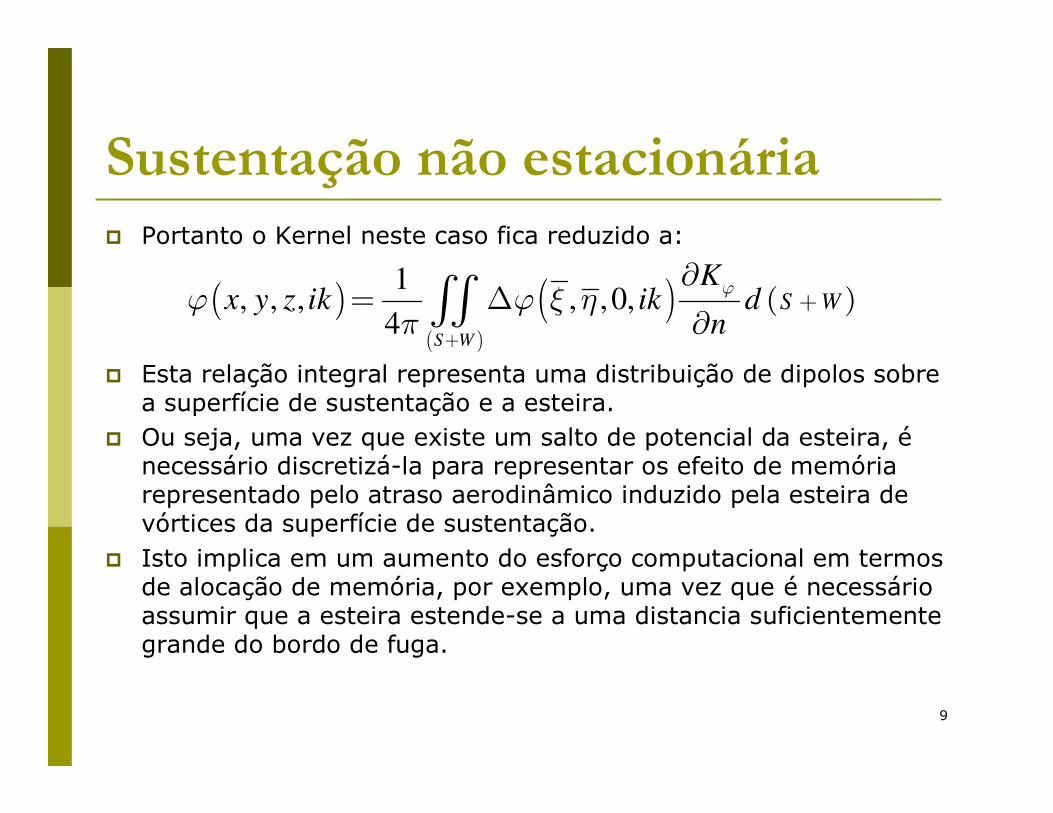
� Portanto o Kernel neste caso fica reduzido a:
� Esta relação integral representa uma distribuição de dipolos sobre a superfície de sustentação e a esteira.
� Ou seja, uma vez que existe um salto de potencial da esteira, énecessário discretizá-la para representar os efeito de memória representado pelo atraso aerodinâmico induzido pela esteira de vórtices da superfície de sustentação.
� Isto implica em um aumento do esforço computacional em termos de alocação de memória, por exemplo, uma vez que é necessário assumir que a esteira estende-se a uma distancia suficientemente grande do bordo de fuga.
( ) ( )( )
( )1
, , , , ,0,4
S W
S WK
x y z ik ik dn
ϕϕ ϕ ξ η
π+
+∂
= ∆∂∫∫

10
Potencial de Aceleração
� Desta forma, é conveniente recorrer a uma formulação em termos do potencial de aceleração, pois se o potencial de velocidade satisfaz a equação:
� O potencial de aceleração também vai satisfazer, uma vez que se pode escrever o a equação do potencial aerodinâmico linearizadocomo função do potencial de aceleração.
� Como o potencial de aceleração é na realidade a pressão linearizada, e na esteira não se tem salto de pressão, seránecessário somente discretizar o domínio que compreende a superfície da asa.
( ) ( )( )
( )1
, , , , , 0,4
S W
S WK
x y z ik ik dn
ϕϕ ϕ ξ η
π+
+∂
= ∆∂∫∫

11
Potencial de Aceleração
� Pode-se associar o potencial de aceleração ao potencial de velocidade através da relação que define a pressão linearizadacomo função do potencial de velocidade.
( )
0
, , , ,
pU
x t
bx y z ik ik k
x U
ϕ ϕψ
ρ
ϕ ωψ ϕ
∞
∞
∆ ∂∆ ∂∆ ∆ =− = + ∂ ∂ ∂∆
∆ = + ∆ =∂
12
Potencial de Aceleração
� Da mesma forma, as derivadas por potencial de velocidade bem como o potencial de aceleração satisfazem a equação do potencial aerodinâmico linearizado.
� Como
é uma equação diferencial, pode-se obter a relação inversa como:
com x0 uma variável auxiliar.
( ), , ,x y z ik ikx
ϕψ ϕ
∂∆∆ = + ∆
∂
( ) ( )0
0 0, , , , , ,
x
ikxikxx y z ik e e x y z ik dxϕ ψ
−∞
= ∫

13
Kernel na relação integral
� A escolha do limite inferior da integral como é feita para satisfazer a condição que ϕϕϕϕ desaparece quando x � ∞∞∞∞, ou seja, a frente da superfície de sustentação
� Substituindo a relação para o salto do potencial de velocidade ∆ϕ∆ϕ∆ϕ∆ϕpelo potencial de aceleração chega-se a seguinte relação integral:
onde:
obtido quando assumimos o MHS
( ) ( ) ( )1, , , , ,0, , ,0,
8p
S
x y z ik C ik K X Y ik dSψϕ ξ ηπ
=− ∆∫∫
( ) ( )0
0 0, ,0 , ,0
X
ikxikXK
K X Y e e x Y dxn
ϕ
ψ
−
−∞
∂=
∂∫
14
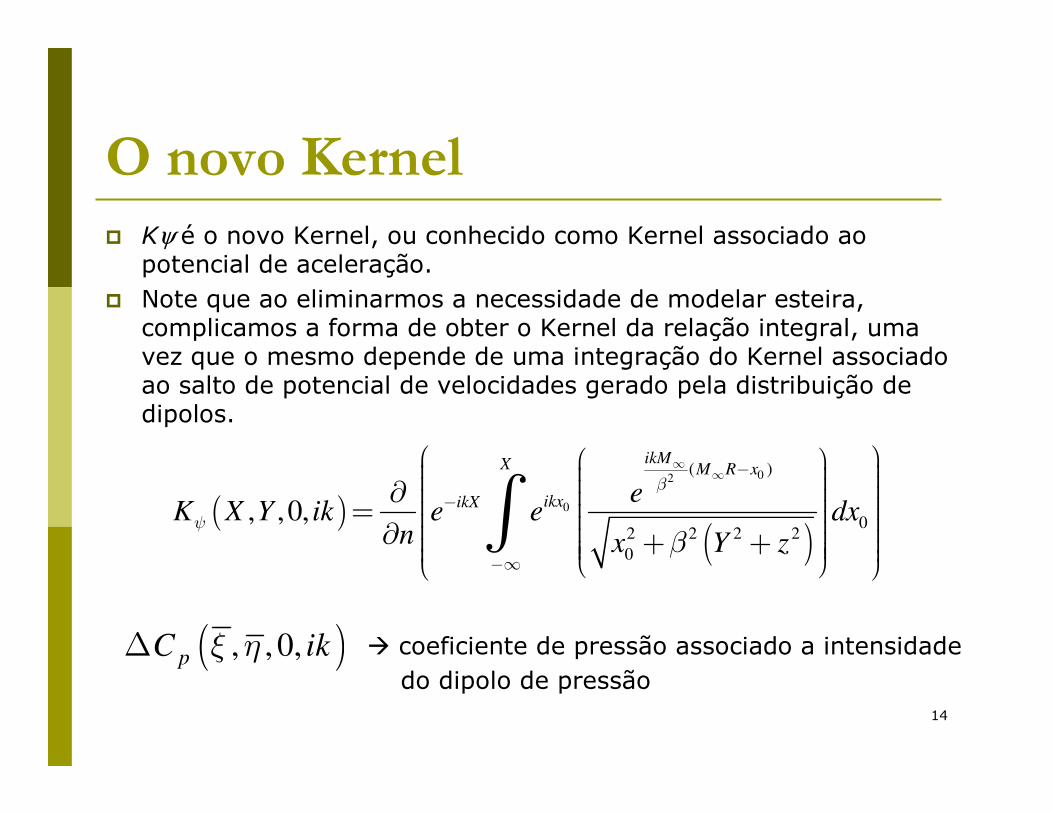
O novo Kernel
� Kψ é o novo Kernel, ou conhecido como Kernel associado ao potencial de aceleração.
� Note que ao eliminarmos a necessidade de modelar esteira, complicamos a forma de obter o Kernel da relação integral, uma vez que o mesmo depende de uma integração do Kernel associado ao salto de potencial de velocidades gerado pela distribuição de dipolos.
( )( )
02
0
( )
02 2 2 2
0
, ,0,
ikMX M R x
ikxikX eK X Y ik e e dx
n x Y z
β
ψ
β
∞∞ −
−
−∞
∂ = ∂ + + ∫
( ), , 0,pC ikξ η∆ � coeficiente de pressão associado a intensidadedo dipolo de pressão
15
Particularizando a solução
� Para particularizar a solução do problema integral, devemos associar condições de contorno que definem o nosso corpo bem como os movimentos a ele associados.
� Convenientemente, ao escrevemos a relação entre o salto de velocidade (downwash) e a condição de contorno, ao representar através da relação linearizada, temos, transformado para o domínio da frequência:
� Note que ϕϕϕϕn representa a devida do potencial na direção normal, e h(x,y,0) uma função de deslocamento da superfície de sustentação. (condição de contorno de Neumann)
( ) ( ) ( ) ( ), , 0, , ,0, , ,0 , ,0n
hx y ik w x y ik x y ikh x y
xϕ
∂= = +
∂
16
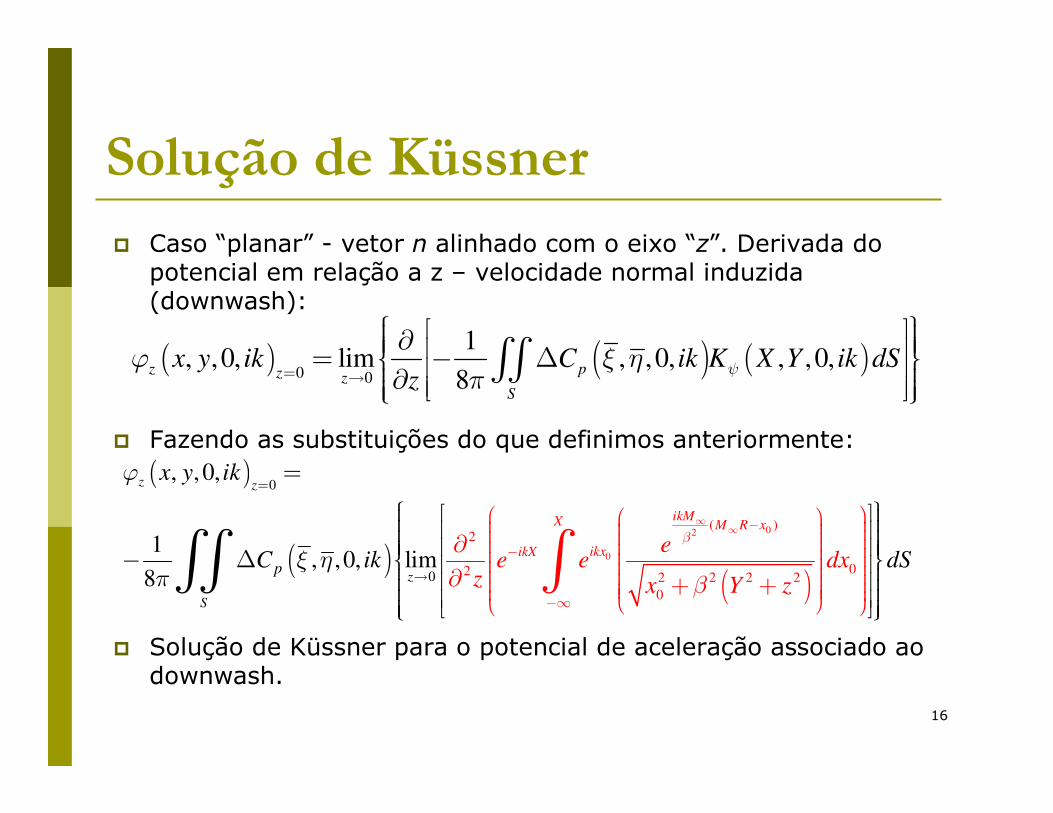
Solução de Küssner
� Caso “planar” - vetor n alinhado com o eixo “z”. Derivada do potencial em relação a z – velocidade normal induzida (downwash):
� Fazendo as substituições do que definimos anteriormente:
� Solução de Küssner para o potencial de aceleração associado ao downwash.
( ) ( ) ( )0 0
1, ,0, lim , ,0, , ,0,
8z pz z
S
x y ik C ik K X Y ik dSz
ψϕ ξ ηπ= →
∂ = − ∆ ∂ ∫∫
( )
( )( )
02
0
( )2
0
022 2 2 20
0
, , 0,
1, ,0, lim
8
ikMX M R x
ikx
z z
z
S
ikX
p
x y ik
ee e dx
z x YC ik S
zd
β
ϕ
ξ ηπ β
∞∞ −
−
−∞
=
→
∂
=
− ∆
∂ + +
∫ ∫∫
17
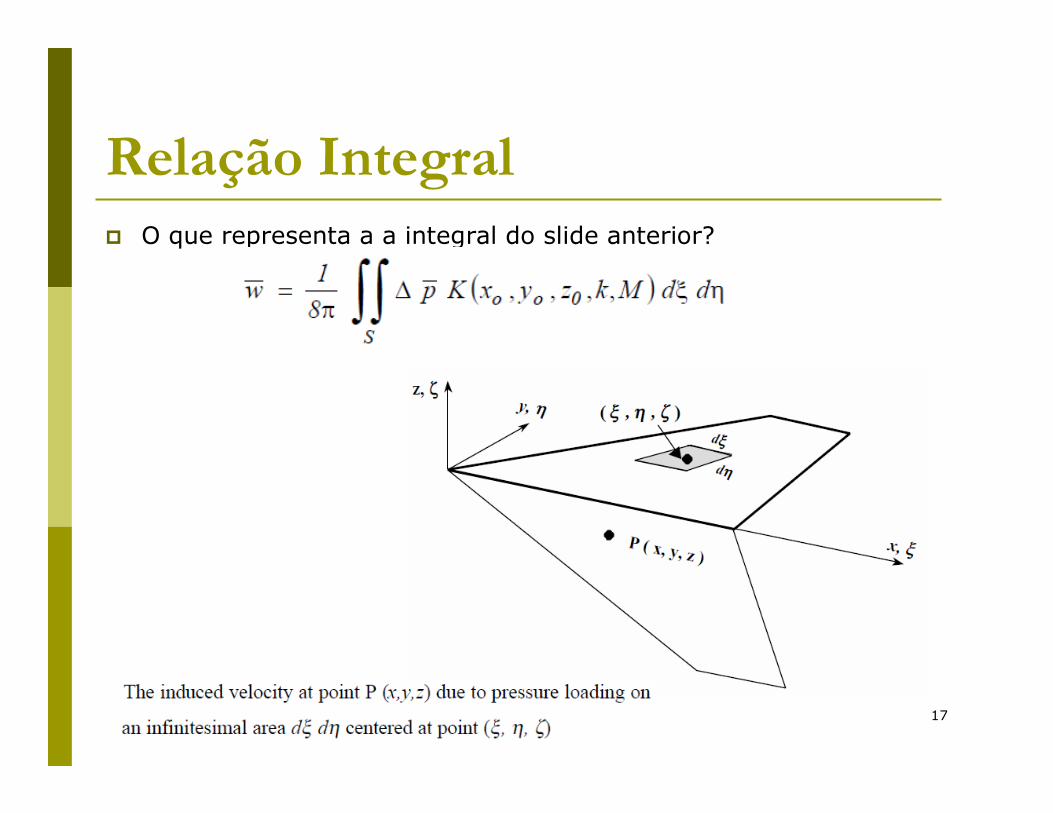
Relação Integral
� O que representa a a integral do slide anterior?

18
Asa discretizada por
dipolos de pressão – BC’s
� Porém o que queremos são as velocidades normais induzidas em pontos de uma superfície devido a uma distribuição de dipolos de pressão sobre esta mesma superfície.
� Inicialmente integramos o potencial de aceleração sobre a superfície para calcular o a intensidade do dipolo como uma função do salto de pressão;
� Agora vamos integrar a derivada do potencial de velocidade na direção z , ou seja, o downwash ( ou velocidades normais induzidas) e obter :
(130)
( ) ( )
( )( ) ( )
20
2
2
, , , ,
1 1
4
M Ri xix
aU
S
d d
w x y z x y zz
pU
e e dz R
λω ξωξ
βξ ηλ
φ
πρ
∞
∞
− − − − −
∞
−∞
∂ ∂
∂= =∂
= ∆ ∫∫∫

19
A Função Kernel
� Para tornar mais simpática a equação (130), é comum encontrar-se na literatura a expressão:
(131)
onde :
(132)
é conhecido como a função Kernel.
E lembrando que :
( ) ( ) ( )1, , ,
4,
S
d dK x yw x z pU
zy ξ ηξπ
ηρ ∞
− −−
= ∆∫∫
( )( ) ( )
20
2
2
1, ,
M Ri x iix
aU UK x y z e e e d
z R
λω ξ ωλωξ
βξ η λ
∞
∞ ∞
− − − − −
−∞
∂ − − = ∂ ∫
( ) ( ) ( )2 2 22 2R x y zξ β η β ζ= − + − + −
20
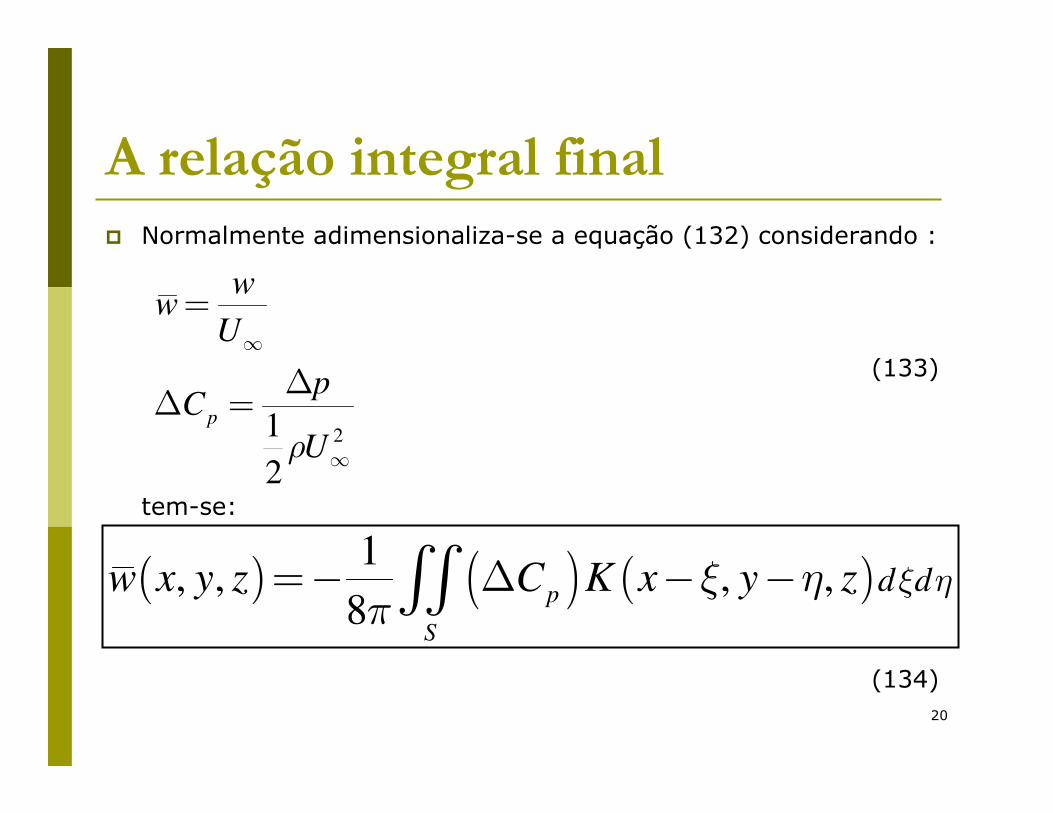
A relação integral final
� Normalmente adimensionaliza-se a equação (132) considerando :
(133)
tem-se:
(134)
21
2
p
ww
U
pC
Uρ
∞
∞
=
∆∆ =
( ) ( ) ( )1, , , ,
8p
S
d dw x y z C K x y z ξ ηξ ηπ
=− ∆ − −∫∫
21
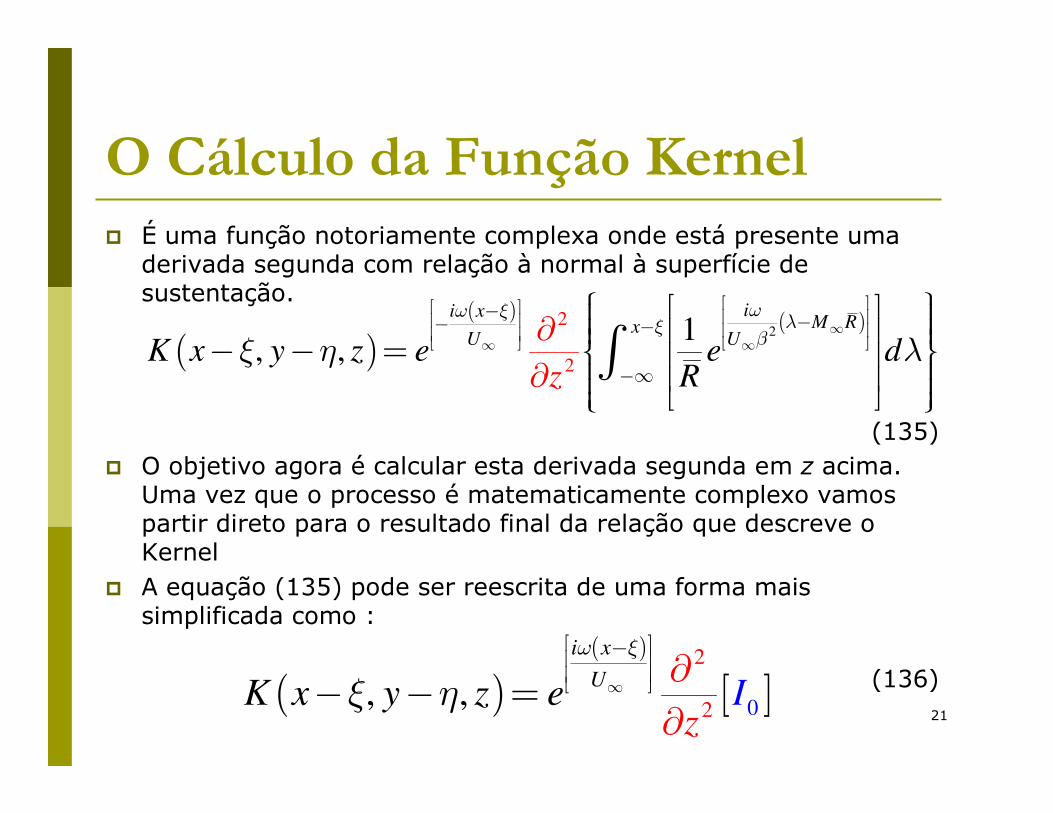
O Cálculo da Função Kernel
� É uma função notoriamente complexa onde está presente uma derivada segunda com relação à normal à superfície de sustentação.
(135)� O objetivo agora é calcular esta derivada segunda em z acima.
Uma vez que o processo é matematicamente complexo vamos partir direto para o resultado final da relação que descreve o Kernel
� A equação (135) pode ser reescrita de uma forma mais simplificada como :
(136)
( )( ) ( )
22
2
1, ,
ii xM Rx
U UK x y z e e d
z R
ωω ξλξ
βξ η λ
∞∞ ∞
− −− −
−∞
− − =
∂∂
∫
( )( )
[ ]2
02, ,
i x
UK x y e Iz
z
ω ξ
ξ η ∞
− ∂
∂− − =
22
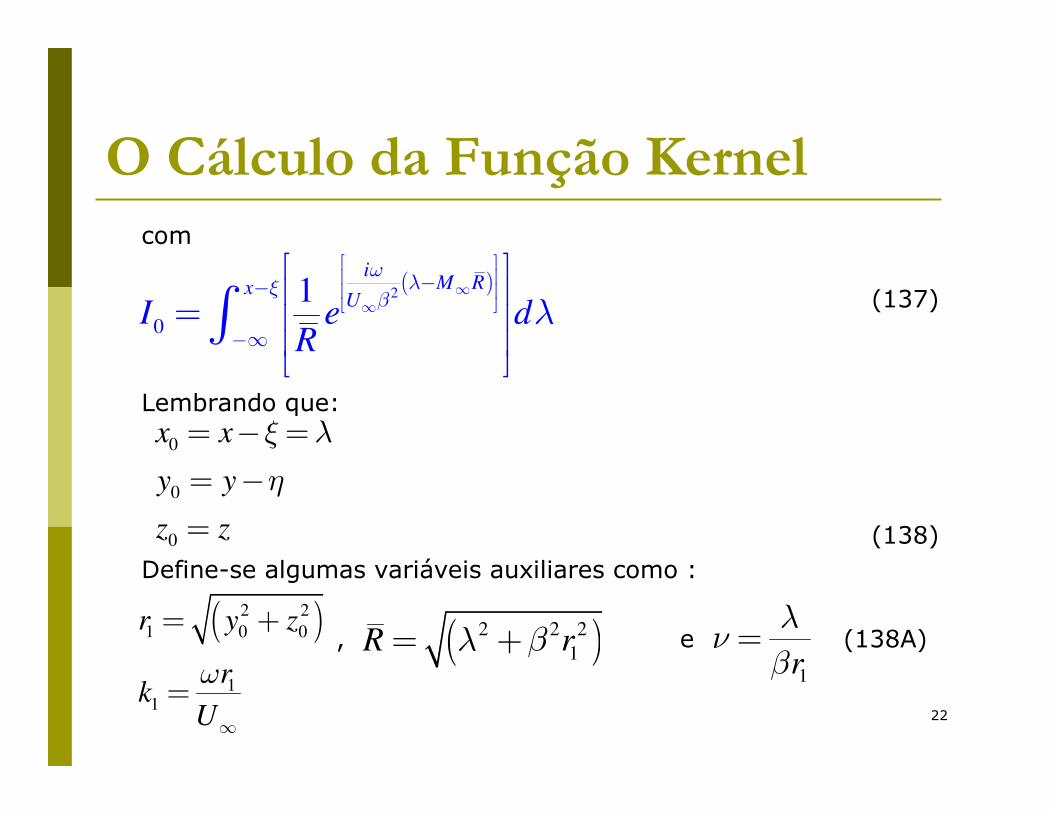
O Cálculo da Função Kernel
com
(137)
Lembrando que:
(138)Define-se algumas variáveis auxiliares como :
, e (138A)
( )2
0
1i
M RxU
I e dR
ωλξ
βλ
∞∞
−−
−∞
=
∫
0
0
0
x x
y y
z z
ξ λ
η
= − =
= −
=
( )2 2
1 0 0
11
r y z
rk
U
ω
∞
= +
=
( )2 2 2
1R rλ β= +
1r
λνβ
=
23
O Cálculo da Função Kernel
� Ao se aplicar a derivada segunda presente na Eq. (136), e considerando as mudanças de variáveis apresentadas tem-se
(139)que também pode ser escrita como
(140)� Landahl propôs uma mudança de variáveis para integral I0 dada
por:
, onde
( )( ) 2 2
0 0 0 00 0 0 3 2 2
1 1 1 1 1
1, ,
i x
U z I z IK x y z e
r r r r r
ω ξ
∞
−
∂ ∂ = − + ∂ ∂
( )( ) 2
0 0 00 0 0 2
1 1 1 1 1 1
1 1, ,
i x
U I z IK x y z e
r r r r r r
ω ξ
∞
−
∂ ∂∂ = + ∂ ∂ ∂
1
0 2 2
1
i t
U
t
eI dt
r t
ω
∞
−∞
= +
∫1t ur=
( )1 1 1 02
1t u r M R x
β∞= = −

24
Versão Plana (“Planar”)� No caso de estudos aerodinâmicos em um contexto linear, a
pequenas perturbações de superfícies de sustentação finas, tal como no caso de asas, o efeito da espessura é de segunda ordem.
� Desta forma é consistente assumir apenas uma distribuição de dipolos para representar o salto de potencial que ocorre no caso da asa oscilando segundo um movimento harmônico simples, bem como o salto de potencial que ocorre na esteira.
� Singularidade do tipo fonte usualmente são empregadas para modelar os efeitos de espessura, enquanto que as singularidades dipolo servem para modelar o efeito de salto de potencial, o qual está associado a um salto de pressão (o mesmo raciocínio foi usado por Theodorsen, quando usou uma fonte e um sorvedouro aproximando-se de casa lado – extradorso e intradorso – do aerofólio).

25
“Planar”
A adoção da aproximação plana simplificará bastante a soluçãodo problema, uma vez que apenas algumas das integrais deverãoser calculadas como segue:
26
Kernel “Planar”
� Na seqüência é necessário calcular as derivadas de I0 compondo novas funções que posteriormente serão usadas para o calculo do Kernel.
� Rodemich derivou uma expressão geral para a função Kernel, e Landahl propôs uma forma mais simplificada para representar esta expressão:
(142)� A abordagem para calcular o Kernel será simplificada assumindo
que a superfícies de sustentação coincide com o plano (x,y), ou planar. Desta forma, tem-se:
, e(143)
� Este resultado pode ser verificado ao se considerar a asa é plana e com z=0. (Trabalho de Albano e Rodden)
( )( )
1 1 2 2
2
1
, ,
i x
U K T K TK x y z e
r
ω ξ
ξ η ∞
−
+ − − =
1 1T =2
02
1
zT
r
=
27
Kernel “Planar”
� Falta determinarmos as parcelas K1 e K2 da Eq. (143) que podem ser escritas como:
e
(144)� A resultado final obtido por Landahl para o caso mais geral pode
ser encontrado no trabalho de Albano e Rodden, ou Giesing, Kalman, e Rodden.
� Todavia, dada a simplificação para o caso plano (z0=0) permite que a fórmula final fique ainda mais simples.
� Fazendo o limite de z tendendo a zero, deve-se observar o comportamento do Kernel dada pela Eq. (142) quanto a possibilidade de problemas numéricos.
01 1
1
IK r
r
∂=
∂3 0
2 1
1 1 1
1 IK r
r r r
∂∂ = ∂ ∂

28
Kernel “Planar”
� No entanto, assumindo que a superfície é plana, tem-se o resultado final para o Kernel simplificado dado por: :
(145)
� O cálculo da função K1 requer a avaliação da integral I1 . Esta integral está relacionada à integral I0 cuja solução fora simplificada assumindo-se o caso plano.
� A expressão para K1 e dada por:
(146)
( )( )0
0
10 0 0 20
1
lim , ,
i x
U
z
KK x y z e
r
ω
∞
→
=
[ ] [ ]
( )
1 1 1
1
11 1 1 32
2 211
,1 1
ik u ik u
u
M r e eK I I du
R u u
∞− −∞
=− − = + +
∫
29
Kernel “Planar”
� Esta integral por sua vez ainda pode ser simplificada considerando o caso plano, resultando em :
(147)� A integral J1 pode ser resolvida aproximando-a por uma série
finita. Esta solução foi apresentada por Laschka para o caso onde o argumento da integral u é positivo e maior que zero. Esta série é representada por:
(148)
[ ]
( )( ) [ ]
( )[ ]1 1 1 1 1
1
11 1 1 11 1
22 21
1 , 1
1 1
ik u ik u ik u
u
u uI e ik J J e e du
u u
∞− −
= − + − = − + +
∫
( )
11
12 12
1
1
ncu
n
n
ua e
u
−
=
− = +
∑

30
Aproximação de Laschka
� O coeficiente c = 0.372 e os coeficientes an são dados por:
( )( )
111
1 12 2 21 1
ncu
n
n
a eJ nc ik
k n c
−
=
≅ − +
∑
( )
11
12 12
1
1
ncu
n
n
ua e
u
−
=
− = +
∑

31
Aproximação de Laschka
� Substituindo a equação (148) em (147) tem-se:
(149)
� Obtem-se desta forma, uma aproximação para a integral I1. Porém, esta fórmula é valida para apenas para u1 > 0.
� Uma vez que o integrando da equação (146) é simétrico, quando u1 < 0, pode-se tirar vantagem desta simetria e obter o valor para I1 e usar a mesma aproximação da equação (149) para estas condições.
� Avalia-se separadamente a parte real e imaginária como:
(150)
( )( )
111
1 12 2 21 1
ncu
n
n
a eJ nc ik
k n c
−
=
≅ − +
∑
( ) ( )[ ] ( )[ ] ( )[ ]1 1 1 1 1 1 1 1 1 1 1, 2Re 0, Re , Im ,I u k I k I u k i I u k= − − + −
32
Métodos de elementos discretos
baseados na função Kernel
� O que apresentamos anteriormente é a base para todos os desenvolvimentos baseados em métodos de função Kernel.
� Avaliar o Kernel não é tarefa fácil, especialmente quando mesmo refere-se a um salto de pressão (potencial de aceleração)
� A diferenças entre os métodos baseados em função Kernel são essencialmente associadas a técnicas que buscam uma solução racional para esta função que é complicada.
� Dentre alguns métodos clássicos, podemos citar:� Doublet Lattice Method (DLM) - Albano e Rodden (1969),� Doublet Point Method (DPM) - Ueda e Dowell (1982),� ZONA 6 Method – Chen e Liu (1990),� ...
33
Caso de Estudo:
O método “Doublet Lattice”
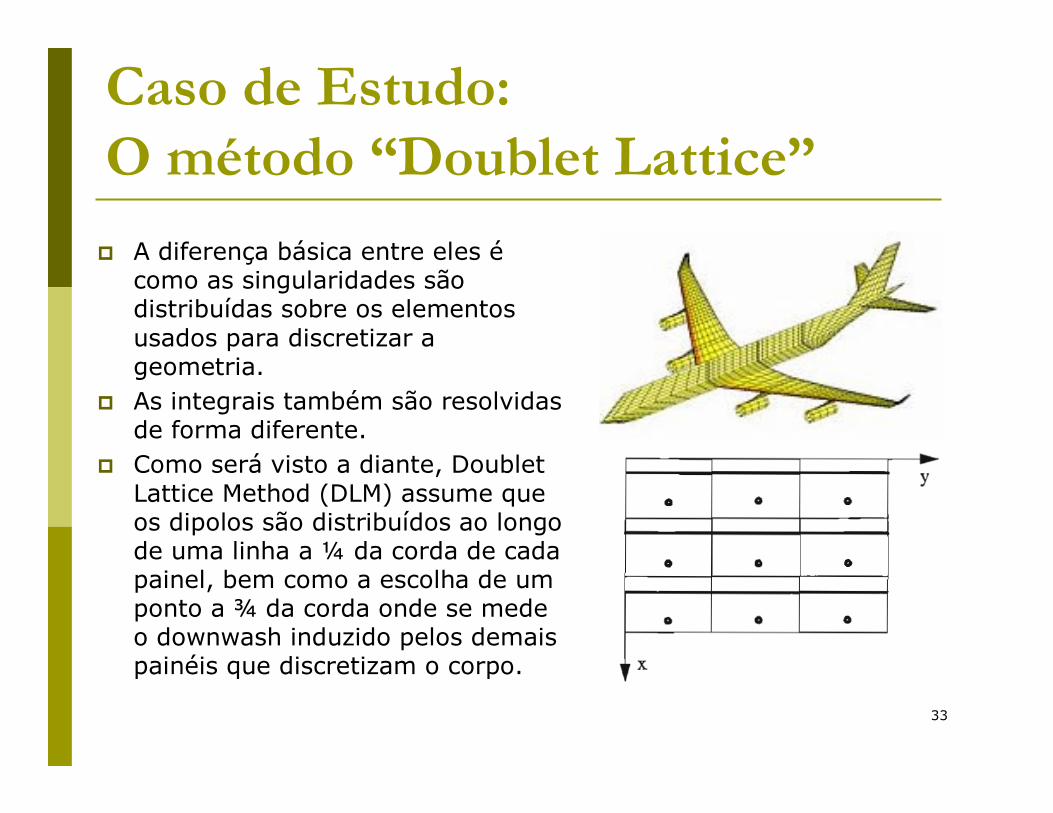
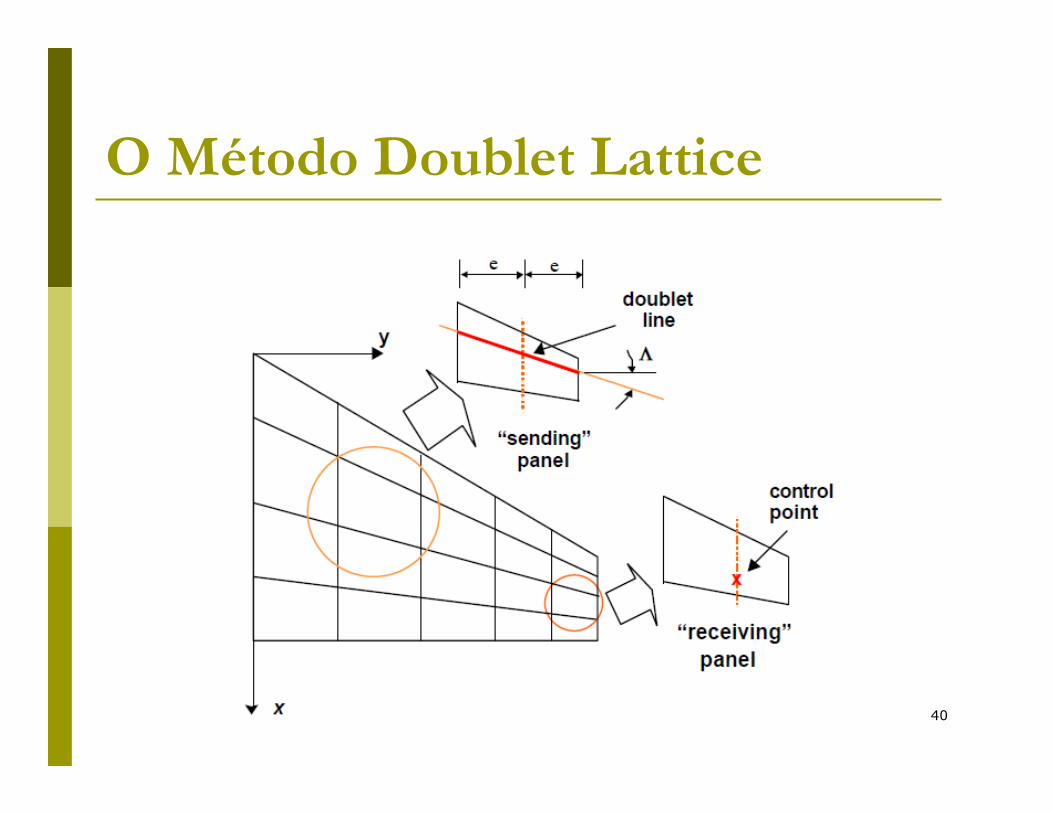
� A diferença básica entre eles écomo as singularidades são distribuídas sobre os elementos usados para discretizar a geometria.
� As integrais também são resolvidas de forma diferente.
� Como será visto a diante, DoubletLattice Method (DLM) assume que os dipolos são distribuídos ao longo de uma linha a ¼ da corda de cada painel, bem como a escolha de um ponto a ¾ da corda onde se mede o downwash induzido pelos demais painéis que discretizam o corpo.

34
O Método Doublet Lattice
� O método doublet lattice é um método de painéis onde a solução elementar é representada por um dipolo de pressão de intensidade que varia harmonicamente no tempo.
� A equação integral que representa o método é dada por(151)
� Uma vez que se está restringindo esta solução para o caso plano, o Kernel pode ser re-apresentado como:
(152)
(153)
( ) ( ) ( )1, , , ,
8p
S
d dw x y z C K x y z ξ ηξ ηπ
=− ∆ − −∫∫
( )( )0
10 0 2 2
00
, ,0 lim
i x
U KK x y e
y
ω
ε ε∞
→
= +
[ ]
[ ]
( )
1 1
1
1
0
1 12 2 2 2
0 0 1
1 32 21
1
1
ik u
ik u
u
M y eK I
x y u
eI du
u
β
−∞
∞ −
=− − + + = +
∫( )
0
1
2 2 2
0 0 0
1 2
0
yk
U
M x y xu
y
ω
β
β
∞
∞
=
+ −=

35
O Método Doublet Lattice
� A função Kernel é singular para . Em existindo esta singularidade deve-se tomar um cuidado especial ao se integrar este Kernel para se obter o downwash. (Eq. 151)
� Esta singularidade acontece quando os “sending points” dos painéis estão alinhados com os “receiving points”, do próprio painel, bem como com os painéis a montante a a jusante.
� Ou seja, a singularidade ocorre quando as coord. y e η são as mesmas ou x0 e y0 forem ambos nulos .
� Outro fato a ser notado é que u1 varia de –∞ a +∞. Ou seja, seráque é possível avaliar a equação (151) com todas estas dificuldades?
� Uma forma de se evitar estas dificuldades numéricas é através de soluções analíticas tal como funções aproximadas.
� Uma forma de tratarmos tais dificuldades é o emprego “valores principais”.E do que trata “Valores Principais”?
� O procedimento de valores principais estabelece que o limite para
ε � 0 é obtido no passo final da solução do meu problema.
0y
36
O Método Doublet Lattice
� A implementação do método Doublet Lattice é baseada em um procedimento empírico cujo objetivo é simplificar o cálculo da integral da Eq. (151).
� Ao invés se assumir que os dipolos estão dispostos ao longo do plano de cada elemento que discretiza a superfície de sustentação, considera-se que os mesmos estão dispostos ao longo de uma linha ao longo da envergadura de cada painel.
� Esta forma simplifica também do ponto de vista do tratamento dos painéis que pode ser uniforme ao longo de toda a superfície discretizada.
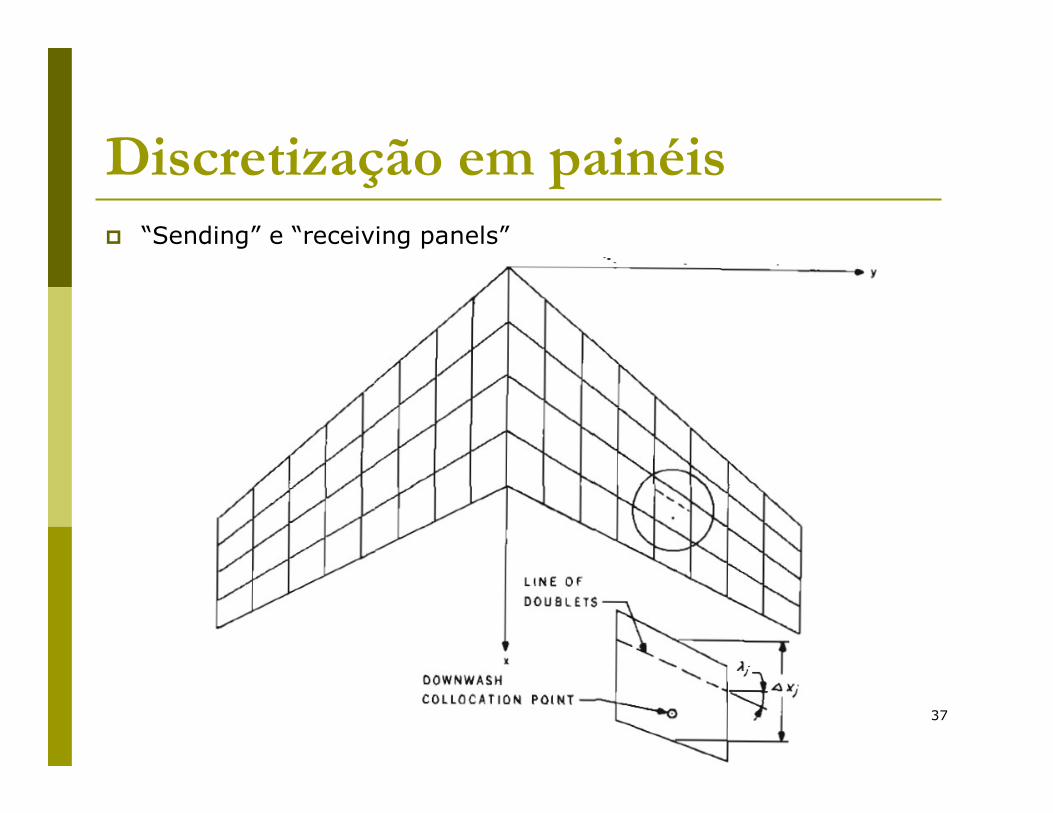
� Esta linha de dipolos é colocada sobre a linha a ¼ da corda de cada painel, enquanto que o downwash medido em um ponto a ¾da corda do painel, sobre a sua linha de centro.
� A escolha destas posições é de natureza empírica.
37
Discretização em painéis
� “Sending” e “receiving panels”

38
Elemento
� Orientação do elemento

39
O Método Doublet Lattice
� Desta forma, a integral de área presente na Eq. (151):
(154)
� Poderá ser representada por uma integral, ao longo de cada uma das distribuições lineares de dipolo ao longo da corda do painel.
(155)
( ) ( ) ( )1, , , ,
8p
S
d dw x y z C K x y z ξ ηξ ηπ
=− ∆ − −∫∫
( ) ( ) ( )1, , , ,
8
L
p
L
w x y z C K x y z dlξ ηπ
+
−
=− ∆ − −∫
40
O Método Doublet Lattice

41
O Método Doublet Lattice
� A força por unidade de comprimento ∆f desta distribuição de dipolos assim como a força por unidade de área do painel (∆p -salto de pressão) são assumidas constantes dentro do painel e são relacionadas por:
(156)� Aplicando a transformação de coordenadas :
(157)
pois : e
cos
força fp f p xcos
área x
∆∆ = = ⇒∆ =∆ ∆ Λ
∆ Λ
( ) ( ), ,lξ η ξ→
( ) ( )0
1, ,0 lim , ,
4S
d dlf
w x y K x y zU xε
ξξ ηπρ →
∞
− ∆ = − − ∆∫∫
coslη= Λcos
fp
x
∆∆ =
∆ Λ
42
O Método Doublet Lattice
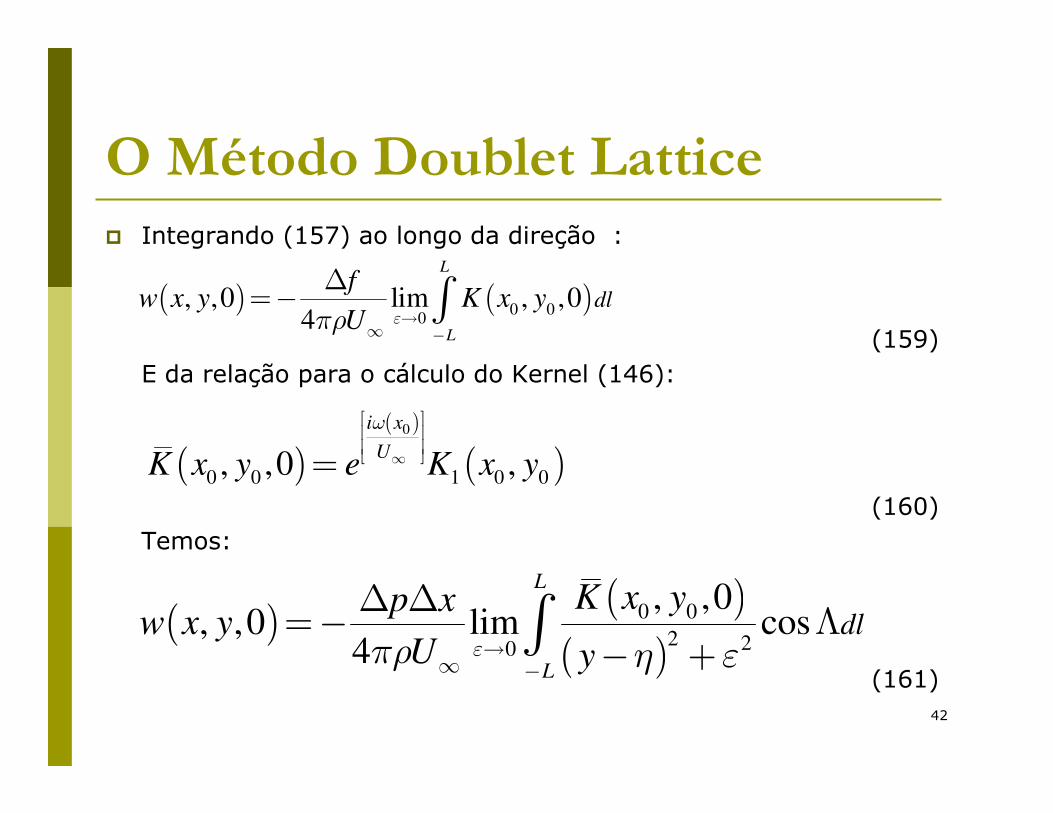
� Integrando (157) ao longo da direção :
(159)E da relação para o cálculo do Kernel (146):
(160)Temos:
(161)
( ) ( )0 00
, ,0 lim , ,04
L
L
dlf
w x y K x yU επρ →∞ −
∆=− ∫
( )( )
( )0
0 0 1 0 0, ,0 ,
i x
UK x y e K x y
ω
∞
=
( ) ( )( )
0 0
2 20
, ,0, ,0 lim cos
4
L
L
dlK x yp x
w x yU yεπρ η ε→∞ −
∆ ∆=− Λ
− +∫

43
O Método Doublet Lattice
Como:
(162)
( ) ( ) ( )( )
( )( )
( )( )
0 0
2 20
cos
0 0
2 20cos
0 0
2 20
, ,0, ,0 cos lim
4
, ,0lim cos
4
, ,0lim
4
L
L
L
L
e
e
dl
dl
d
K x yp xw x y
U y
K x yp x
U y
K x yp x
U y
ε
ε
εη
πρ η ε
πρ η ε
πρ η ε
→∞ −
Λ
→∞ − Λ
→∞ −
∆ ∆=− Λ
− +
∆ ∆=− Λ
− +
∆ ∆−
− +
∫
∫
∫
44
O Método Doublet Lattice
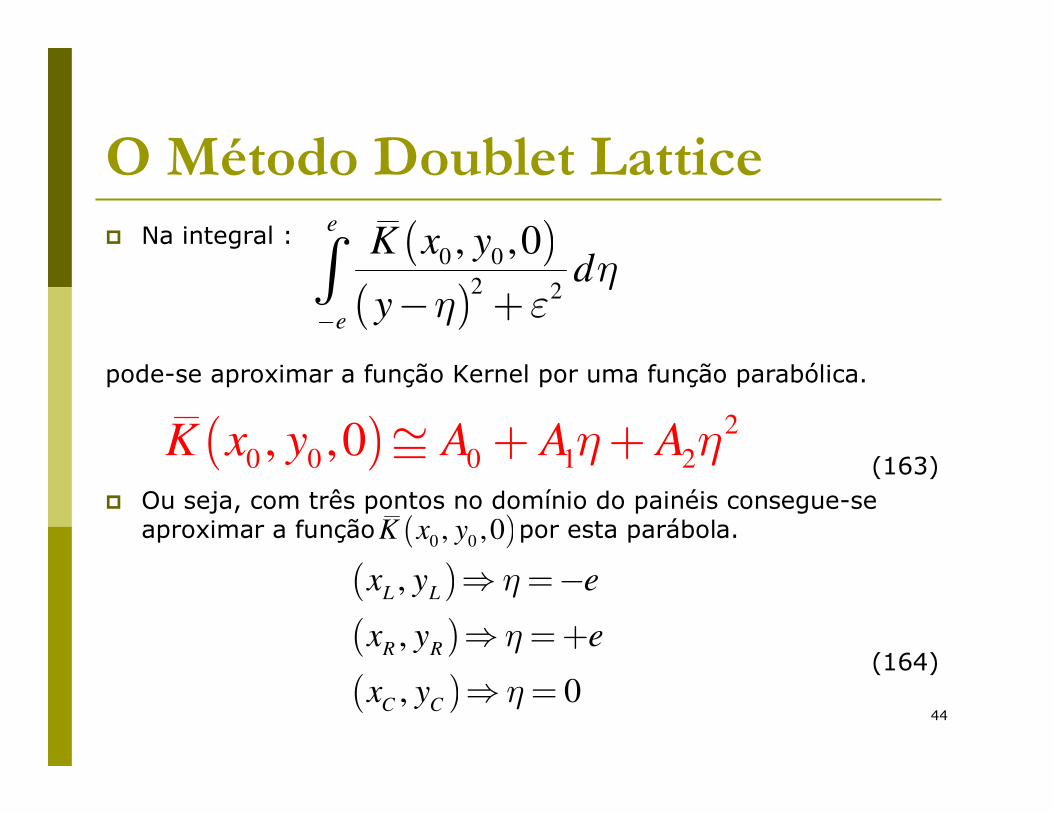
� Na integral :
pode-se aproximar a função Kernel por uma função parabólica.
(163)� Ou seja, com três pontos no domínio do painéis consegue-se
aproximar a função por esta parábola.
(164)
( )( )
0 0
2 2
, ,0e
e
K x yd
yη
η ε− − +∫
( ) 2
0 0 0 1 2, ,0K x y A A Aη η≅ + +
( )0 0, ,0K x y
( )( )( )
,
,
, 0
L L
R R
C C
x y e
x y e
x y
η
η
η
⇒ =−
⇒ =+
⇒ =

45
O Método Doublet Lattice
� Os coeficientes são dados por:
(165)
Portanto:
(166)
( )( ) ( )
( ) ( ) ( )
2
1
0 2
,
, ,
2
, 2 , ,
2
L L
R R L L
L L C C R R
A K x y
K x y K x yA
e
K x y K x y K x yA
e
=
−=
− −=
( )( )
[ ]
2
2 20
0 1 2
0 1 2
, ,0 lim4
4
e
e
dp x
w x yU y
A A
p xB B B
U
A
εη
η η
πρ η ε
πρ
→∞ −
∞
+ +∆ ∆=−
− +
∆ ∆=− + +
∫
46
O Método Doublet Lattice
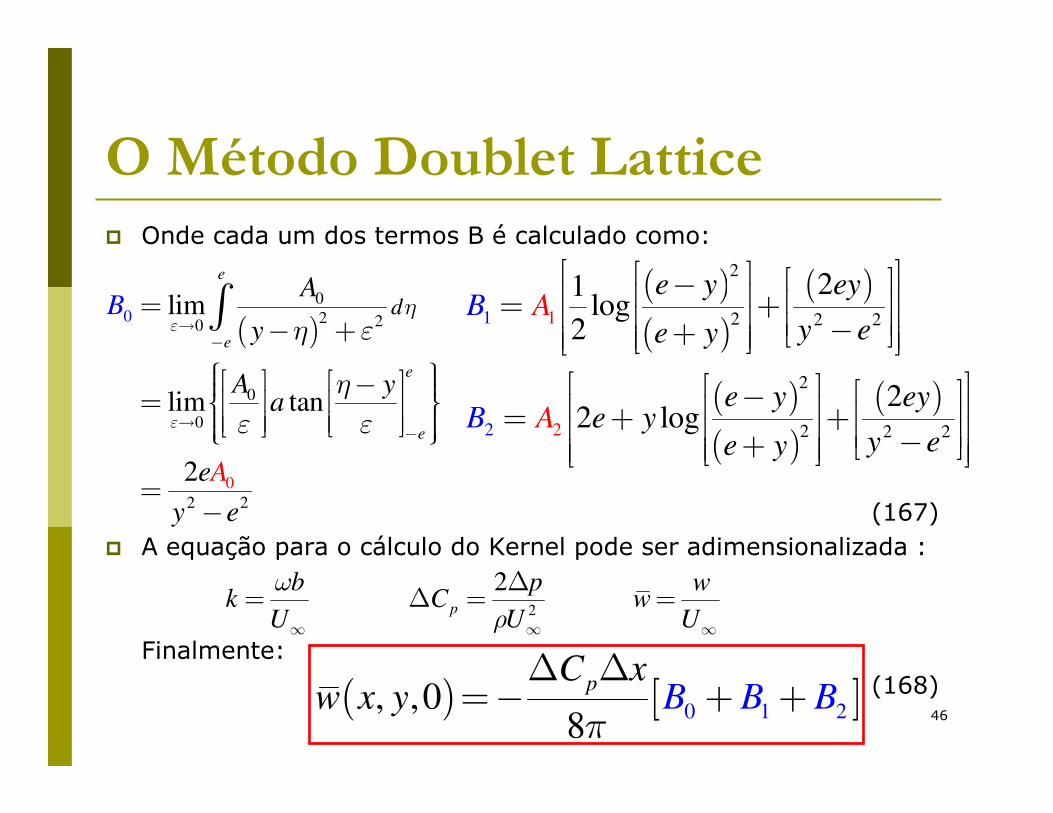
� Onde cada um dos termos B é calculado como:
(167)� A equação para o cálculo do Kernel pode ser adimensionalizada :
Finalmente: (168)
( )0
20 20
0
2
0
0
2
lim
lim tan
2
e
e
e
e
dA
y
A ya
e
y e
A
Bε
ε
ηη ε
η
ε ε
→−
→−
=− +
− =
=−
∫( )( )
( )
( )( )
( )
1
2
2
2 2 2
2 2
1
2
22
21log
2
22 log
e y ey
y ee y
e y eye y
y
A
Aey
Be
B − = + −+ − = + + −+
bk
U
ω
∞
=2
2p
pC
Uρ ∞
∆∆ =
ww
U∞
=
( ) [ ]0 1 2, ,08
pC
B B Bx
w x yπ
∆ ∆=− + +
47
Vortex Lattice
� Quando a frequência reduzida é nula, o DLM se reduz ao VortexLattice Method (VLM)
� Portanto é bastante comum encontrar nas implementações do DLM onde VLM também implementado para se obter a matriz de coeficientes de influencia para k=0
� Esta idéia se justifica pois a solução do VLM é absolutamente analítica sem requer qualquer tipo de aproximação para a solução das integrais associadas ao Kernel.
� Boas referencias sobre o método:� Katz e Plotkin – “Low Speed Aerodynamics”� AFFDL-TR-71-5 PART I, VOL I
48
Vortex Lattice (k=0)
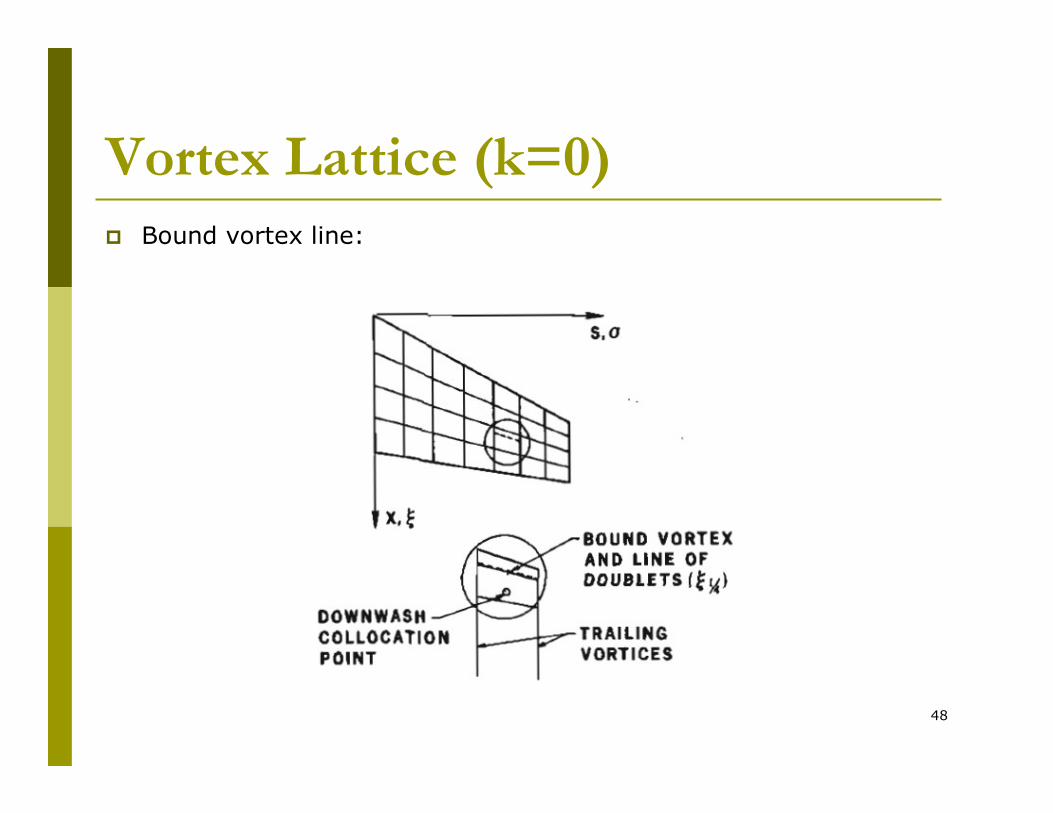
� Bound vortex line:
49
Método Vortex Lattice
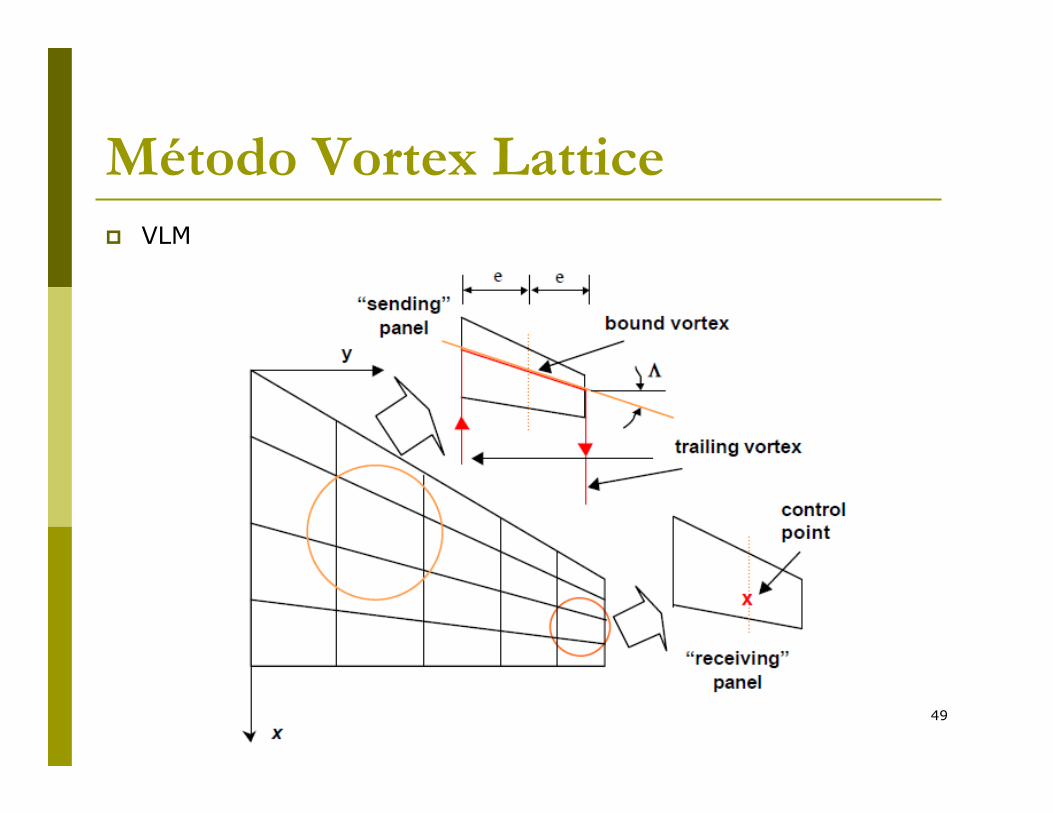
� VLM
50
Carregamentos através do DLM
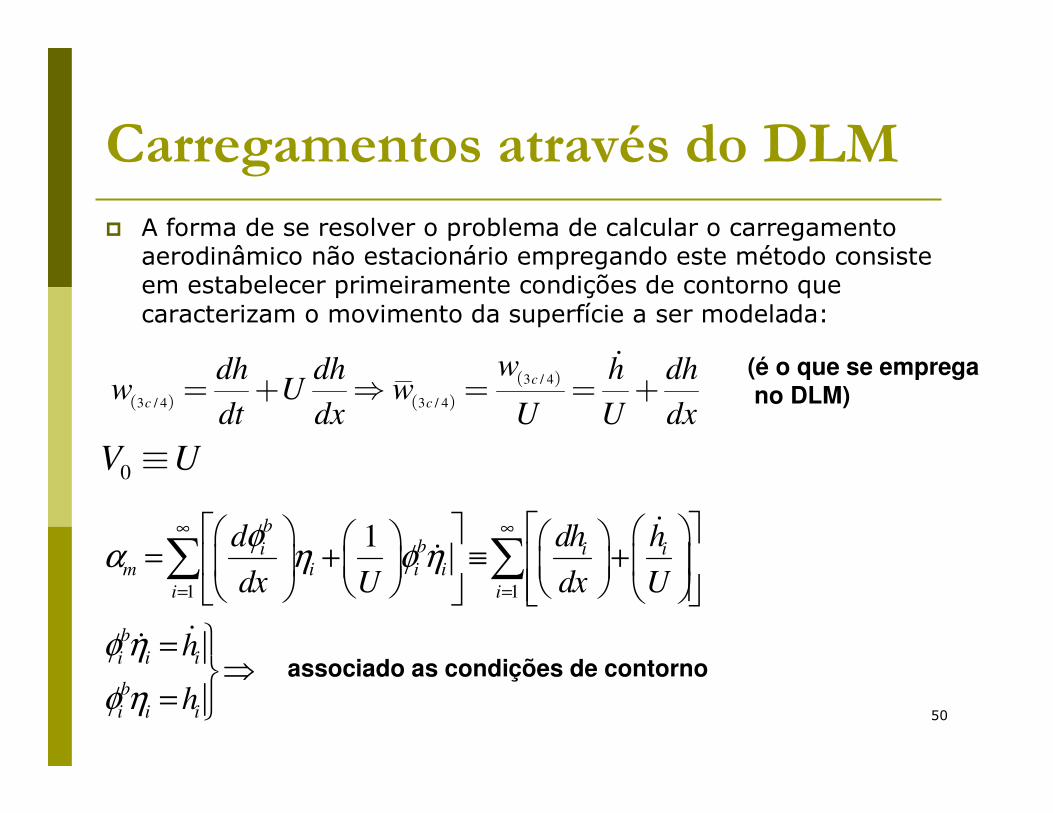
� A forma de se resolver o problema de calcular o carregamento aerodinâmico não estacionário empregando este método consiste em estabelecer primeiramente condições de contorno que caracterizam o movimento da superfície a ser modelada:
( ) ( )( )3 / 4
3 / 4 3 / 4
c
c c
wdh dh h dhw U w
dt dx U U dx
�= + ⇒ = = +
1 1
1b
bi i im i i i
i i
b
i i i
b
i i i
d dh h
dx U dx U
h
h
φα η φ η
φ η
φ η
∞ ∞
= =
= + ≡ +
= ⇒
=
∑ ∑�
�
��associado as condições de contorno
(é o que se empregano DLM)
0V U≡

51
Coeficientes de influência
� O conceito básico dos métodos de elementos discretos foi assumir que o corpo é subdivididos elementos, conhecidos como painéis
� Cada painel possui um ponto conhecido como ponto de controle onde se impõem a condição de contorno (e se associa ao downwash induzido pelo movimento).
� A equação integral é aproximada pela soma de integrais elementares associada a cada painel.
� As integrais elementares que representam as influências de um painel nele mesmo, assim como a interferência mútua entre os painéis implica em um sistema de equações que relacionam pressões ao downwash.
� Como resultado tem-se um sistema de equações algébricas que pode ser representado na forma matricial.
52
Matriz AIC
� Esta matriz decorre da representação algébrica referenta a interferência aerodinâmica dos panéis
� Por este motivo é conhecida como matriz de coeficientes de influência (aerodynamic influence coefficients matrix - AIC), e tem como papel relacionar o downwash induzido por um movimento (condição de contorno) que implicará em uma variação de pressão percebida por todos os painéis
� Esta forma linear é justificada pelo principio da superposição das influências exercidas pelas singularidades (dipolos) em cada painel.
� A variação de pressão no painel “j” implica em uma variação no downwash no painel “i”.
( ) ( ) ( )0 0
, ,0, , ,0, lim8
j
j
i
z z z
S
pCx y ik ik K dS
zψϕ ξ η
π= →
∆ ∂ =− ∂ ∫∫

53
Matriz AIC
� i � painel que percebe o downwash, j � painel ao qual estáassociado o salto de pressão
onde D é a matriz de coeficientes de influência. E D é dado por:
uma função exclusivamente do Mach, geometria e frequência reduzida.
i
z i ij p jw D Cϕ = = ∆
( )1 1
0
1lim , ,0, ,
8
j j
j j
ij i n i n n nz
D K x y M k d dz
ξ η
ψ
ξ η
ξ η ξ ηπ
− −
∞→
∂ =− − − ∂ ∫ ∫
54
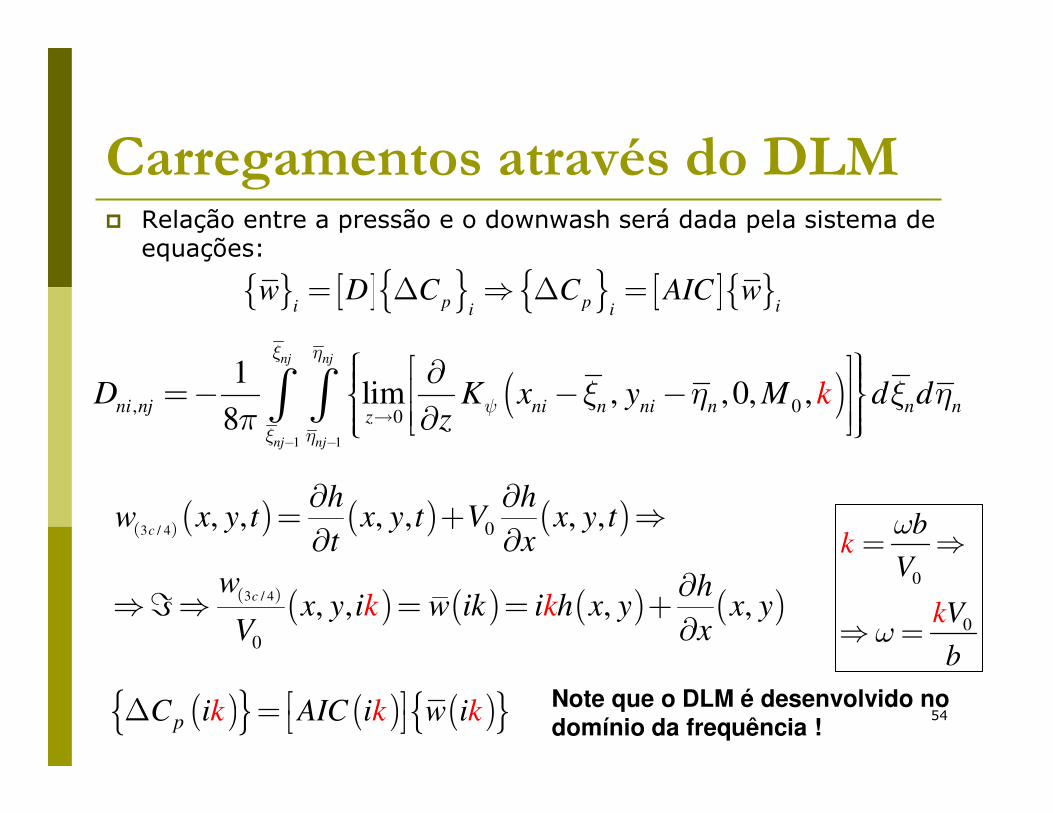
� Relação entre a pressão e o downwash será dada pela sistema de equações:
( )( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
3 / 4
3 / 4
0
0
, , , , , ,
, , , ,
c
c
h hw x y t x y t V x y t
t x
w hx y i w ikk i h x y x y
Vk
x
∂ ∂= + ⇒∂ ∂
∂⇒ℑ⇒ = = +
∂
{ } [ ]{ } { } [ ]{ }p pi ii iw D C C AIC w= ∆ ⇒ ∆ =
( )1 1
, 00
1lim , ,0, ,
8
nj nj
nj nj
ni nj ni n ni n n nz
D K x y M d dz
k
ξ η
ψ
ξ η
ξ η ξ ηπ
− −
→
∂ =− − − ∂ ∫ ∫
( ){ } ( ) ( ){ }pC i AIC ik kwk i ∆ = Note que o DLM é desenvolvido no domínio da frequência !
0
0k
b
V
V
b
kω
ω
= ⇒
⇒ =
Carregamentos através do DLM
55
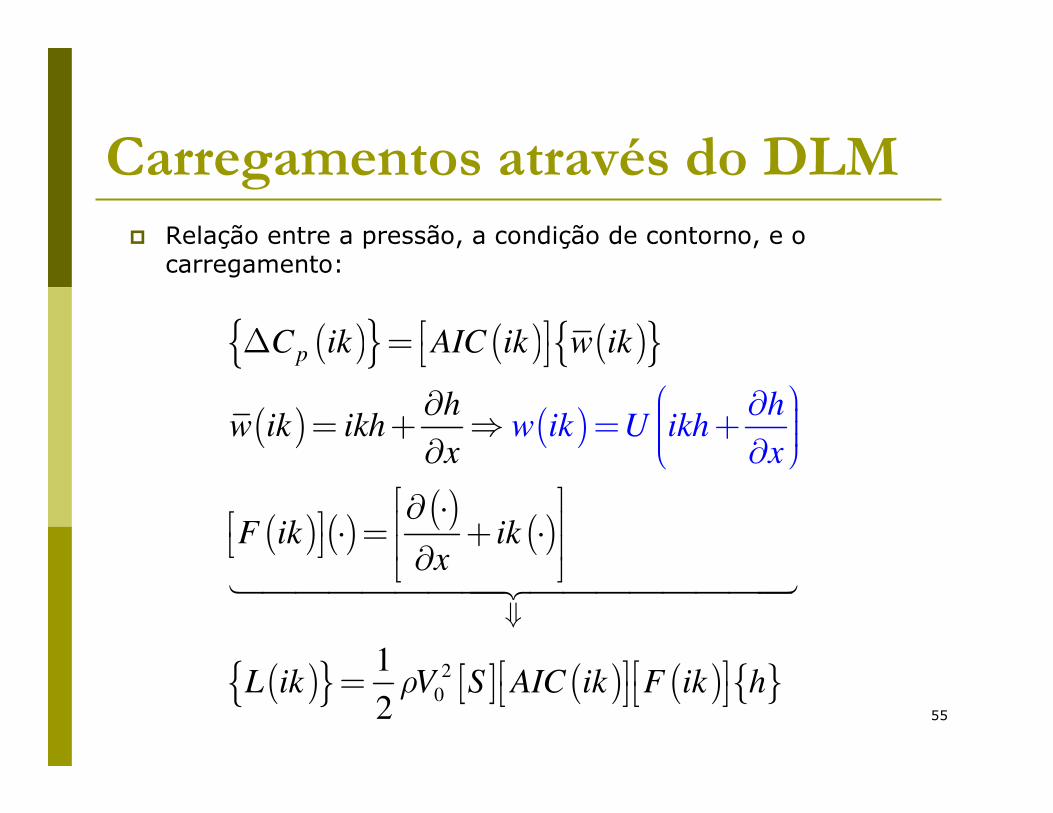
� Relação entre a pressão, a condição de contorno, e o carregamento:
( ){ } ( ) ( ){ }
( ) ( )
( ) ( )( )
( )
( ){ } [ ] ( ) ( ) { }2
0
1
2
p
hw ik U ikh
x
C ik AIC ik w ik
hw ik ikh
x
F ik ikx
L ik V S AIC ik F ik h
�������������������
ρ
⇓
∆ = ∂
= + ⇒∂ ∂
∂
⋅ ⋅ = + ⋅ ∂
=
= + ∂
Carregamentos através do DLM
56
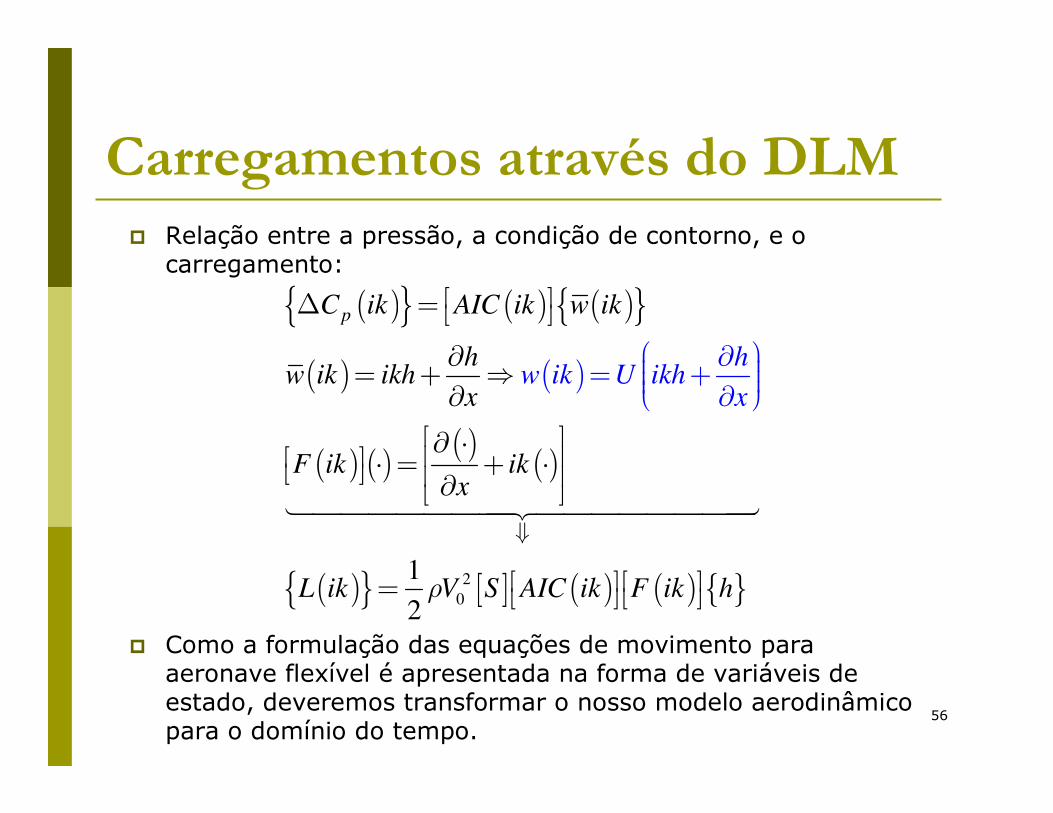
� Relação entre a pressão, a condição de contorno, e o carregamento:
� Como a formulação das equações de movimento para aeronave flexível é apresentada na forma de variáveis de estado, deveremos transformar o nosso modelo aerodinâmico para o domínio do tempo.
( ){ } ( ) ( ){ }
( ) ( )
( ) ( ) ( ) ( )
( ){ } [ ] ( ) ( ) { }2
0
1
2
p
hw ik U ikh
x
C ik AIC ik w ik
hw ik ikh
x
F ik ikx
L ik V S AIC ik F ik h
�������������������
ρ
⇓
∆ = ∂
= + ⇒∂ ∂
∂
⋅ ⋅ = + ⋅ ∂
=
= + ∂
Carregamentos através do DLM

57
Carregamento Aerodinâmico
� Ou seja, fechamos a nosso problema com a possibilidade de obter uma distribuição de pressão nos painéis, a qual pode ser relacionada a uma força aerodinâmica por:
onde S é uma matriz que representa as áreas dos painéis e F(ik):
é um operador que representa a derivada substancial do modo de movimento, responsável por gerar as pressões.
( ){ } [ ] ( ) ( ) { }21
2L ik U S AIC ik F ik hρ =
( ) ( ) ( ) ( )F ik ikx
∂ ⋅ ⋅ = + ⋅ ∂

58
� Lembrando que :
� E o vetor de forças generalizadas, para um modo "i"
{ }{ } { }
{ }{ } { }
b
b
h
h
φ η
φ η
=
=
��
( ){ } { } ( ){ }
( ){ } { } [ ] ( ) ( ) { }{ }
( ){ } { } ( ) { }{ } ( ) { }
2
2 2
0
1
2
1 1
2 2
i
i
i
TB
i
TB B
i i i
TB B
i i i i
Q ik L ik
Q ik U S AIC ik F ik
Q
Q ik U Q ik V Q ik
MAICQ
���������
��������� ���
η
η
η
φ
ρ φ φ η
ρ φ φ η ρ η
=
=
= =
( )( )
( ) ( )w ik
w ik w ik U w ikU
= ⇒ = ⋅
Carregamentos Generalizados
59
Carregamento Generalizado
� Do método DLM, por exemplo implementado no NASTRAN, pode-se extrair todas as matrizes abaixo :
� Note também que:
� Perceba que estamos no domínio da frequência!
[ ] ( ) ( ) ( )S AIC ik F ik Q ik =
( ){ } { } [ ] ( )( )
( ) { }{ }
( ){ } { } [ ] ( ) { }{ }( ) { }{ }
( ){ } { } [ ] ( ) { }( ) { } { }
2
2
2
1
2
1
2
1
2
i
i
i
TB B
i i i
TB B B
i i i i i
TB B B
i i i i
Q ik U S AIC ik ikx
Q ik U S AIC ik ikx
Q ik U S AIC ik ikx
η
η
η
ρ φ φ η
ρ φ φ η φ η
ρ φ φ φ η
∂ ⋅ = + ⋅ ∂ ∂ = + ∂ ∂ = + ∂