- paginas.fe.up.ptpaginas.fe.up.pt/~ee00073/documents/Manuais/RESPIFE_ESPEC_v1.pdf · Freza CNC 1....
12
Projecto Final de Curso 2004/2005 Ref: ESPEC_v1 Data: 30/07/2005 RESPIFE Reengenharia de Sistema Produtivo Integrado para Fins Educacionais Especificações dos Equipamentos Alunos: Filipe Barbosa de Sá Pinto, nº. 0005030955 Rui Alexandre da Costa Ribeiro, n.º 000503073 Data: 30/07/2005 Docente: Armando Sousa Reengenharia de Sistema Produtivo Integrado para Fins Educacionais pág. 1/12 Especificações de Equipamentos
Transcript of - paginas.fe.up.ptpaginas.fe.up.pt/~ee00073/documents/Manuais/RESPIFE_ESPEC_v1.pdf · Freza CNC 1....
Projecto Final de Curso 2004/2005
Ref: ESPEC_v1 Data: 30/07/2005
RESPIFE Reengenharia de Sistema Produtivo Integrado
para Fins Educacionais
Especificações dos Equipamentos
Alunos: Filipe Barbosa de Sá Pinto, nº. 0005030955
Rui Alexandre da Costa Ribeiro, n.º 000503073 Data: 30/07/2005
Docente: Armando Sousa
Reengenharia de Sistema Produtivo Integrado para Fins Educacionais pág. 1/12 Especificações de
Equipamentos

Projecto Final de Curso 2004/2005
Ref: ESPEC_v1 Data: 30/07/2005
1. Descrição
O presente documento visa registar as características / especificações dos equipamentos presente no LabITec. Tenta reunir as informações específicas como números de série e outras com referências com informações de funcionalidades não claramente descritas em manuais técnicos.
2. Equipamentos O LabITec possui nas suas instalações os seguintes equipamentos:
1. Grupo CNC – Robot de Alimentação montado sobre em Slider + Torno CNC + Freza CNC
1. Robot 2. Slider 3. Torno 4. Freza
2. Grupo de Medida – Mesa de Medida + Robot de Alimentação 1. Mesa de Medida 2. Robot CNC
3. Transporte entre os Equipamentos 1. Slider de Equipamento
4. Armazém Automático 1. Armazém Automático
5. Sistema de Segurança 1. Corda de Segurança
São descritos em seguida os equipamentos utilizados no projecto.
Reengenharia de Sistema Produtivo Integrado para Fins Educacionais pág. 2/12 Especificações de
Equipamentos

Projecto Final de Curso 2004/2005
Ref: ESPEC_v1 Data: 30/07/2005
2.1 – Robots
Robot articulado com 5 graus de liberdade conforme demonstra a figura seguinte
• MITSUBISHI Move Master EX - Melfa RV-N1 • Modelo: RV-N1C (max 2.5 Kg) • Serial: 207023 • Date: 1992 July • Serial of the driver of the robot on the CNC side: DU207022 • Serial of the driver of the robot on the CMM: DU207021
Reengenharia de Sistema Produtivo Integrado para Fins Educacionais pág. 3/12 Especificações de
Equipamentos

Projecto Final de Curso 2004/2005
Ref: ESPEC_v1 Data: 30/07/2005
Especificações Técnicas
Diagramas Técnicos
Reengenharia de Sistema Produtivo Integrado para Fins Educacionais pág. 4/12 Especificações de
Equipamentos

Projecto Final de Curso 2004/2005
Ref: ESPEC_v1 Data: 30/07/2005
Espaço de Operação
Reengenharia de Sistema Produtivo Integrado para Fins Educacionais pág. 5/12 Especificações de
Equipamentos

Projecto Final de Curso 2004/2005
Ref: ESPEC_v1 Data: 30/07/2005
A D/U-M1 É a unidade de controlo que comunica através de interface série com o PC permitindo deste modo a comunicação com o robot.
Reengenharia de Sistema Produtivo Integrado para Fins Educacionais pág. 6/12 Especificações de
Equipamentos
Projecto Final de Curso 2004/2005
Ref: ESPEC_v1 Data: 30/07/2005
Especificações
RAM
• Contém 8Kb para 629 possíveis posições e 6KB para 2048 passos de
programas
• EP-ROM de 256Kb para guardar os programas e posições
Interface
• Paralelo ( Centronics )
• Série ( RS-232 )
Equipamento de programação – PC
• Alimentação -120V/220V/230V/240V AC +/- 10% , 0,45KVA
• Botão (tipo pedal) emergência – alimentado a 12V DC
• Velocidade máxima – 1m/s
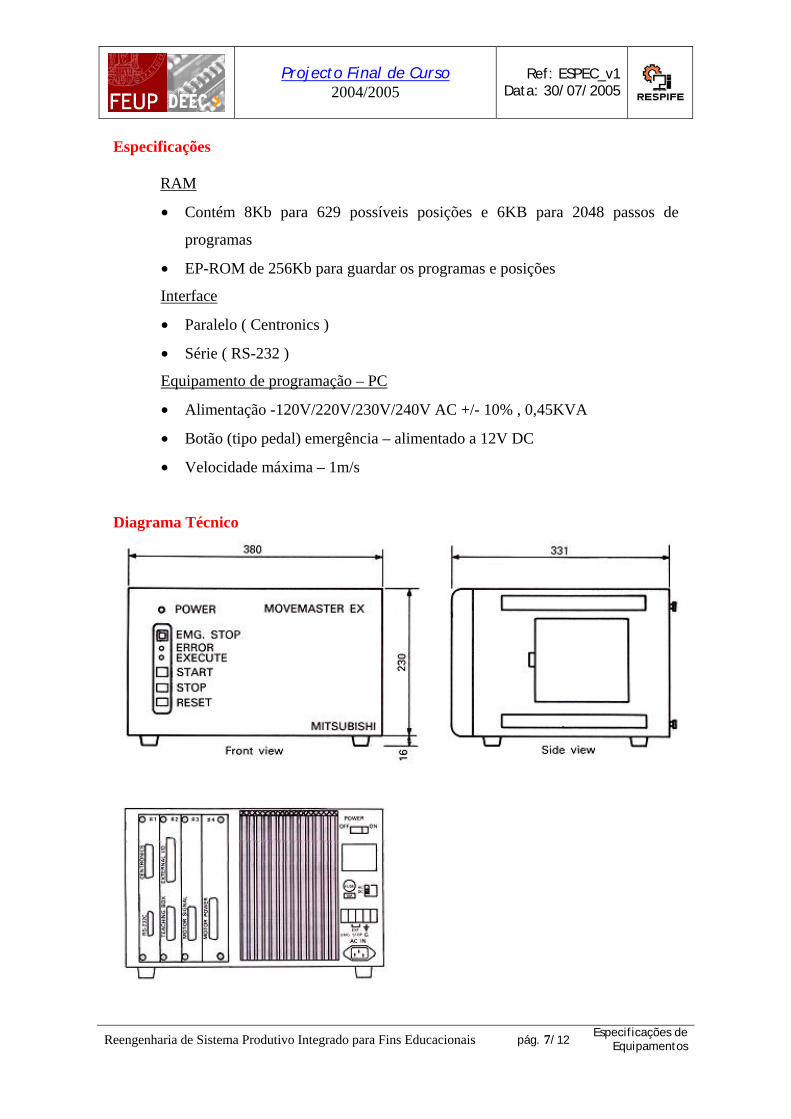
Diagrama Técnico
Reengenharia de Sistema Produtivo Integrado para Fins Educacionais pág. 7/12 Especificações de
Equipamentos
Projecto Final de Curso 2004/2005
Ref: ESPEC_v1 Data: 30/07/2005
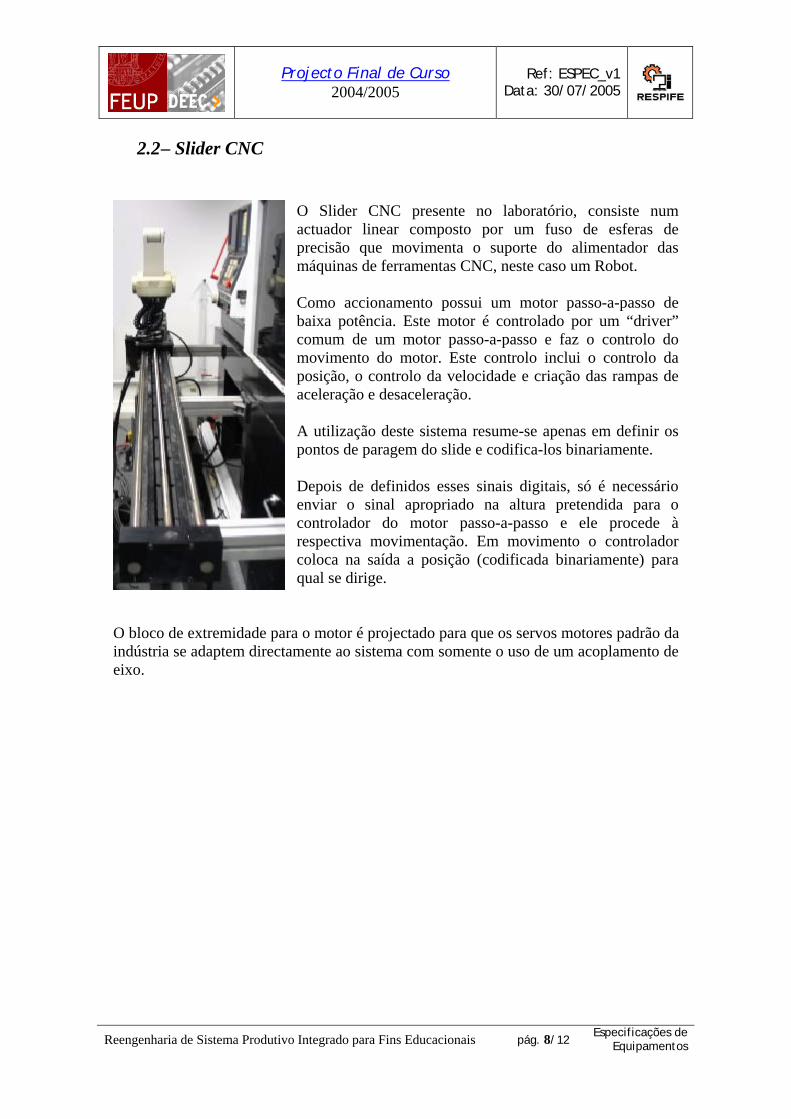
2.2 – Slider CNC
O Slider CNC presente no laboratório, consiste num actuador linear composto por um fuso de esferas de precisão que movimenta o suporte do alimentador das máquinas de ferramentas CNC, neste caso um Robot. Como accionamento possui um motor passo-a-passo de baixa potência. Este motor é controlado por um “driver” comum de um motor passo-a-passo e faz o controlo do movimento do motor. Este controlo inclui o controlo da posição, o controlo da velocidade e criação das rampas de aceleração e desaceleração. A utilização deste sistema resume-se apenas em definir os pontos de paragem do slide e codifica-los binariamente. Depois de definidos esses sinais digitais, só é necessário enviar o sinal apropriado na altura pretendida para o controlador do motor passo-a-passo e ele procede à respectiva movimentação. Em movimento o controlador coloca na saída a posição (codificada binariamente) para qual se dirige.
O bloco de extremidade para o motor é projectado para que os servos motores padrão da indústria se adaptem directamente ao sistema com somente o uso de um acoplamento de eixo.
Reengenharia de Sistema Produtivo Integrado para Fins Educacionais pág. 8/12 Especificações de
Equipamentos

Projecto Final de Curso 2004/2005
Ref: ESPEC_v1 Data: 30/07/2005
2.3 – Slider AS (entre equipamentos)
O Slider AS, é constituído por uma carruagem sem veio assente em rolamentos lineares dentro de uma caixa de alumínio, um motor de indução trifásico responsável pelo accionamento e um variador para controlo de velocidade e rampas de aceleração e desaceleração. O PLC actua no variador para accionamentos do slide, onde foram definidos três sinais foward, reverse e limitador de velocidade. Para as posições necessárias colocou-se quatro sensores de posição que são monitorizados pelo PLC.
Reengenharia de Sistema Produtivo Integrado para Fins Educacionais pág. 9/12 Especificações de
Equipamentos

Projecto Final de Curso 2004/2005
Ref: ESPEC_v1 Data: 30/07/2005
2.4 – Torno
A Cyclone P é a terceira maior máquina CNC da série Cyclone. A programação pode ser feita built-in na unidade de controlo FANUC CNC ou por comunicação. A Cyclone P está equipada com servo motores. A máquina suporta software CAD/CAM.
– Cyclone Fanuc – Serial: E04157 – Date: Oct 1992 – Expansion Nr: 4157 – Export Number: 4157 – Serial of Electrics: 1110313
Especificações Gerais
• Desenhada especialmente para educação e formação • Programação via formato ISO • Certificada por normas de segurança aprovadas pela CE • Capacidade de corte de materiais resistentes como ferro, alumínio, acrílico e
plásticos • Compatível com vários softwares CAD (e.g. MASTERCAM, AUTOCAD,
PRODESKTOP) • Incluída protecção total em modo de operação • Controlo de Override do Feedrate e velocidade do eixo • Possibilidade de ser incluída em FMS/CIM
Especificações Técnicas
• Balanço máximo: 255 mm • Diâmetro máximo do giro: 158 mm • Comprimento máximo do giro: 210 mm • Furo do eixo: 35 mm • Nariz do eixo: A2-3” • Distância entre centros: 300 mm • Excursão eixo X: 94 mm • Excursão eixo Y: 210 mm • Capacidade de líquido de refrigeração: 12 litros • Resolução do sistema: 0.001 mm • Peso: 750Kg Mais informações consultar http://www.denford.co.uk/cyclonep.htm
Reengenharia de Sistema Produtivo Integrado para Fins Educacionais pág. 10/12 Especificações de
Equipamentos

Projecto Final de Curso 2004/2005
Ref: ESPEC_v1 Data: 30/07/2005
2.5 – Freza
A Triac FANUC é uma máquina de fresagem de 3 eixos muito versátil, a maior da série Denford. Foi especialmente desenhada para formação técnica, aplicações com produções simples e prototipagem. É operada pelo controlador Fanuc 21i e utiliza servo motores AC associados a encoders absolutos. A programação pode ser feita built-in na unidade de controlo FANUC CNC ou por comunicação. A máquina suporta software CAD/CAM Triac Fanuc Serial: E04157 Date: Nov 1992 Export Number: 4157 Serial of Electrics: 2050745 Equipamento standard:
• Cabine industrial com gaveta para resíduos • Manual de Manutenção e Operação • Ferramentas para substituição • Sistema automático de lubrificação
Especificações de Segurança
• Programas protegidos por chave • Incluída protecção total em modo de operação • Sensores dos limites de eixos ajustáveis
Especificações Técnicas
• Superfície da Mesa de Trabalho: 500mm x 160mm • Excursão Longitudinal: 280mm • Excursão Transversal: 150mm • Excursão Vertical: 235mm • 3 Slots Tee: 10mm largura; 31.5mm centros • Peso: 340 Kg • Resolução: 0.0001mm • Velocidade de rotação do eixo: (Programável 0 - 4000 r.p.m.) • Feedrate Máximo (X,Y) : 7.5 m/min.
Mais informações consultar http://www.denford.co.uk/triacfanuc.htm
Reengenharia de Sistema Produtivo Integrado para Fins Educacionais pág. 11/12 Especificações de
Equipamentos
Projecto Final de Curso 2004/2005
Ref: ESPEC_v1 Data: 30/07/2005
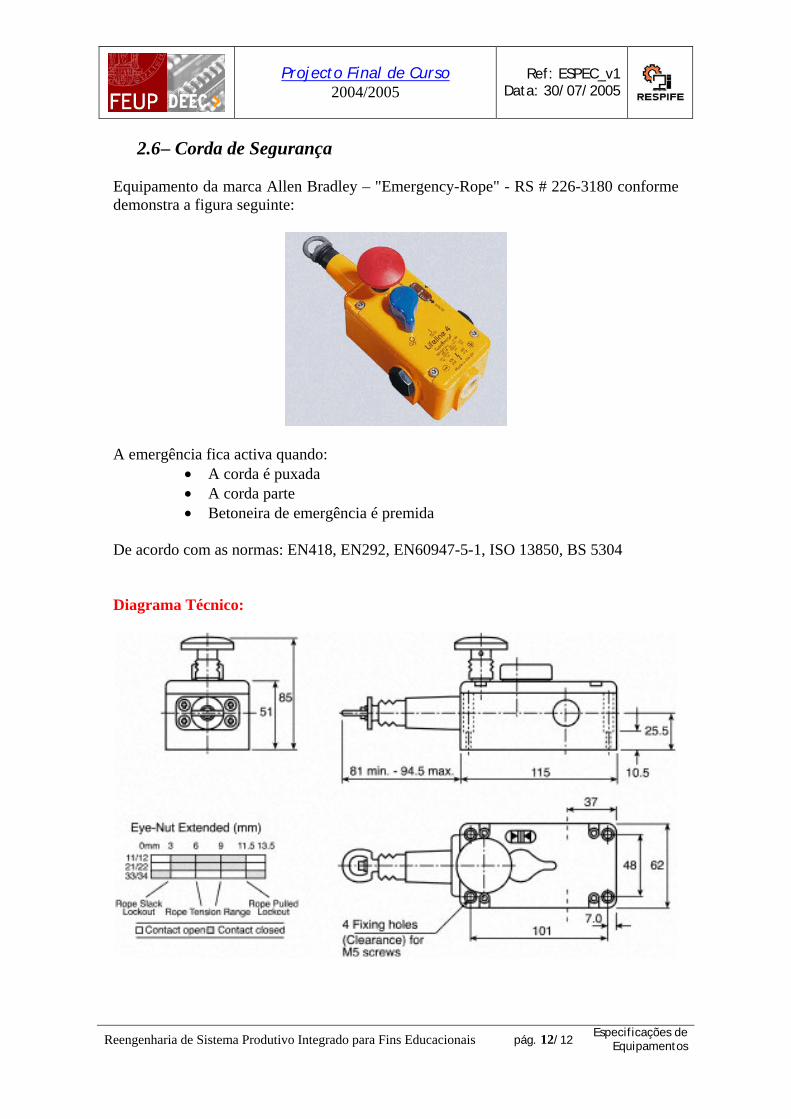
2.6 – Corda de Segurança
Equipamento da marca Allen Bradley – "Emergency-Rope" - RS # 226-3180 conforme demonstra a figura seguinte:
A emergência fica activa quando:
• A corda é puxada • A corda parte • Betoneira de emergência é premida
De acordo com as normas: EN418, EN292, EN60947-5-1, ISO 13850, BS 5304
Diagrama Técnico:
Reengenharia de Sistema Produtivo Integrado para Fins Educacionais pág. 12/12 Especificações de
Equipamentos